正交投影¶
使用场景¶
该步骤通常用于测量类场景,将 3D 点云投影为 2D 深度图,再后接测量类步骤。
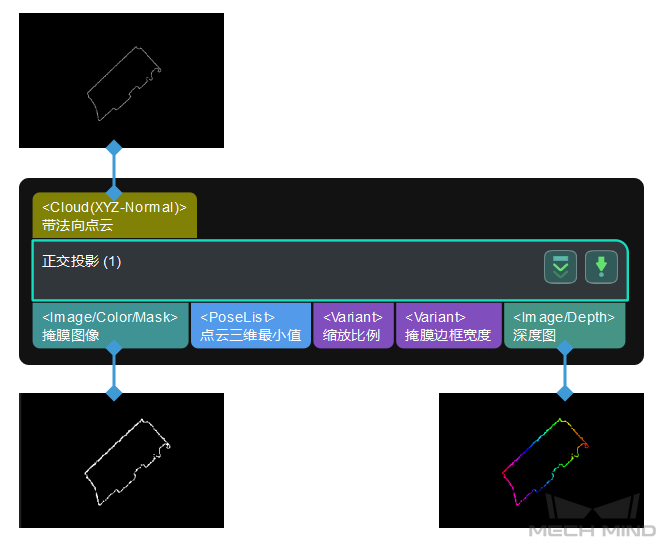
输入与输出¶
参数说明¶
提示
该步骤的参数均位于 显示全部参数 模式下。
正交投影设置
- 分辨率
- 掩膜空白边框宽度
使用指定最小点
参数解释:该参数表示点云包围盒上 X、Y 值最小的角。指定最小点和最大点后,将在最大点和最小点之间的范围上进行正交投影。默认值:不勾选。调节说明:若勾选该项,需设置 最小点 X 值 和 最小点 Y 值 。
- 最小点 X 值
- 默认值:0.000000m调节建议:在未勾选 使用指定最小点 的情况下运行工程后,日志栏将输出参考值。可根据参考值来尝试调整该参数,直至正交投影后的效果符合预期(无干扰点云,只保留目标物体所在区域)。

- 最小点 Y 值
- 默认值:0.000000m调节建议:同 最小点 X 值 。
使用指定最大点
参数解释:该参数表示点云包围盒 X、Y 值最大的角。指定最小点和最大点后,将在最大点和最小点之间的范围上进行正交投影。默认值:不勾选。调节说明:若勾选该项,需设置 最大点 X 值 和 最大点 Y 值 。
- 最大点 X 值
- 默认值:0.000000m调节建议:同 最小点 X 值 。
- 最大点 Y 值
- 默认值:0.000000m调节建议:同 最小点 X 值 。