节拍及路径优化¶
- 生产节拍:
生产节拍是指完成一个工件规定的处理作业内容所要求的时间,即用户规定的年产量对机器人工作站工作效率的要求。
目前大多数项目对于节拍有要求,一些项目对于节拍有极高的要求(4秒或5秒以内)。对于生产节拍要求较高的项目,待工作站能完成整个作业流程后,Mech-Mind软件系统通过视觉算法优化、机器人路径优化,节拍会有较大的提升。节拍主要包括相机拍照时间,Mech-Vision处理时间以及Mech-Viz规划到机器人处理完成的时间,因此对于整个节拍和路径优化主要分为以上三个部分,如图1所示。
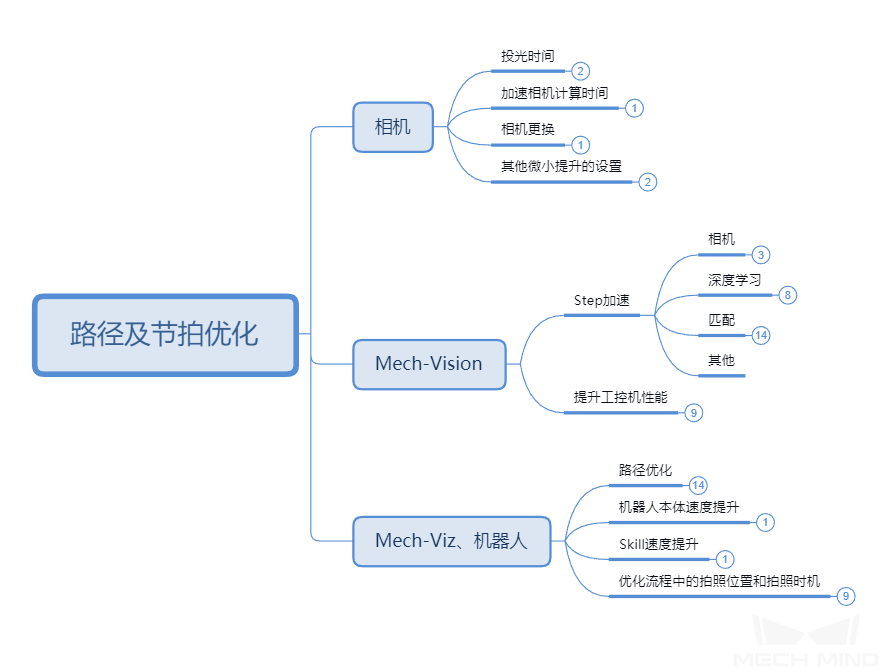
图1 路径及节拍优化整体思路¶
Mech-Eye Viewer¶
投影时间¶
更新¶
使用最新版本的Mech-Eye Viewer软件并同时更新相机固件版本,能够提高深度图和点云图的生成速度,对相机的拍照速度有一定提升。
相机更换¶
梅卡曼德的相机产品中,如Deep系列的相机,由于视野范围大,需要使用两个光机分别投影,再将获得的点云进行合成。因此在正常情况下投影时间会比Pro M和Pro S系列相机高一倍。在确定好现场的工作范围以后,使用合适的相机能够对拍照速度有提升。


Mech-Vision¶
Step加速¶
从相机获取图像¶
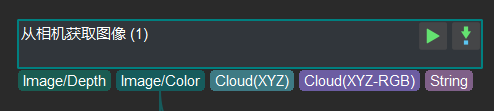
图4 从相机获取图像¶
从相机获取图像 的Step是Mech-Vision工程中最重要的Step,同时也是在大多数工程中占用了约 40% 的时间。从相机获取图像 的耗时主要可以通过上文中的方法解决。同时,也可以把 从相机获取图像 的功能进行拆分,由于相机是采集RGB图像和深度图像,并进行合成生成点云图像。在一些项目中可能同时需要点云和RGB图像进行分别处理,如需要使用深度学习的工程,则可以分别进行处理。如图5所示,由于工程是并行计算,因此可以节省更多时间。
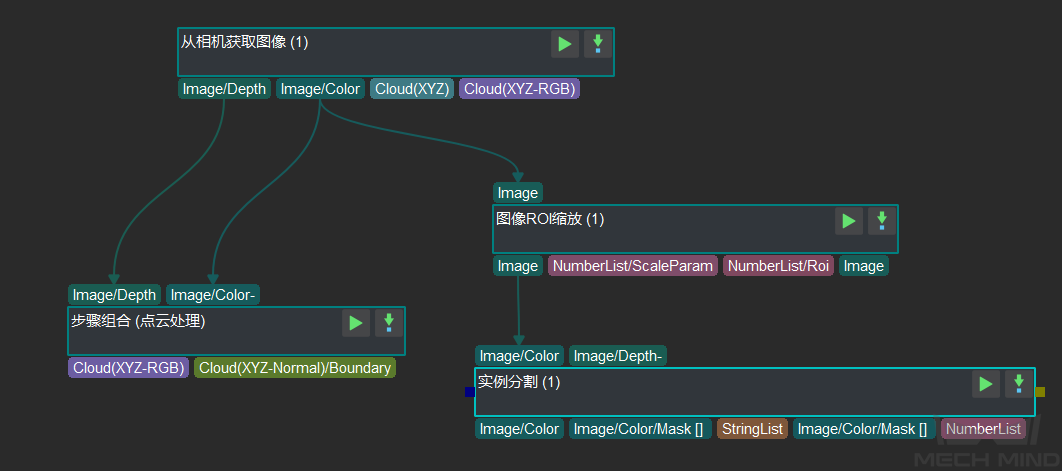
图5 深度学习与点云处理并行计算¶
点云处理¶
在实际项目中,直接从相机获得的点云往往不可以直接使用,还需进行更多具体处理,如点云聚类,合并数据等等。该过程也可通过优化细节来提升节拍。下面列举若干有关点云处理,会显著影响节拍的step以及节拍优化的方法。
3D匹配¶
3D 匹配 由3D粗匹配,3D精匹配组成,根据模板数量还可分为单模板与多模板。其中粗匹配为了计算模板点云在空间点云中的大概位置,3D精匹配为了匹配模板与空间点云。此步骤需要计算空间中每一个点的相对位置,因此点越多则花费更多的时间,精匹配的迭代次数越多也会也会花费更多时间。因此在对这两个Step进行调整的时候,主要朝着减少处理点云数量(数据和模板)和减少迭代次数(精匹配)的方向进行。
小技巧
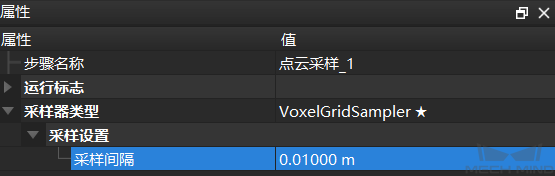
对于粗匹配,若选择【SurfaceMatching】,其中调整【采样设置】来调整点云密度,以减少计算时间。在降采样的点云密度不能再低,但仍需提升节拍的情况下,考虑增大【参考/被参考点采样步长】。
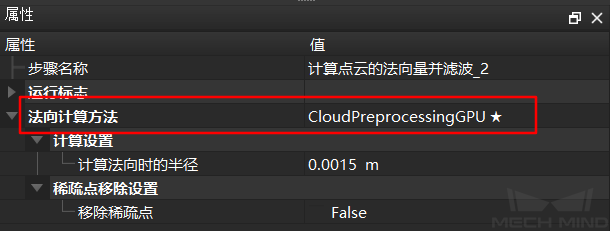
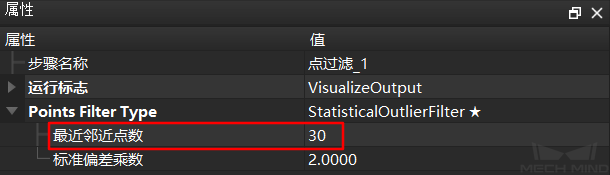
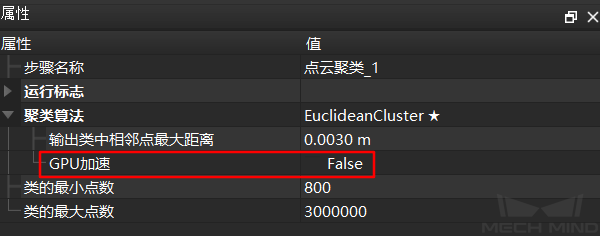
通过前期的一些点云预处理工作,如聚类,ROI,点云滤波等操作前期去除大量无用点云。
在多工件进行匹配时候,也可以适当减少同时匹配的工件数量,如每次只匹配3个工件,提高匹配速度。
根据实际工件的特点,对模板文件进行简化,如大工件采用边缘模板进行匹配,或对模板进行降采样,将点云数量降低至较小的范围。
点方向的计算方法:对于无法向模板,使用【StandardMode】;对于边缘平面物体模板,使用【EdgeTangent】,同时保证被识别物体已被较好地分割开。
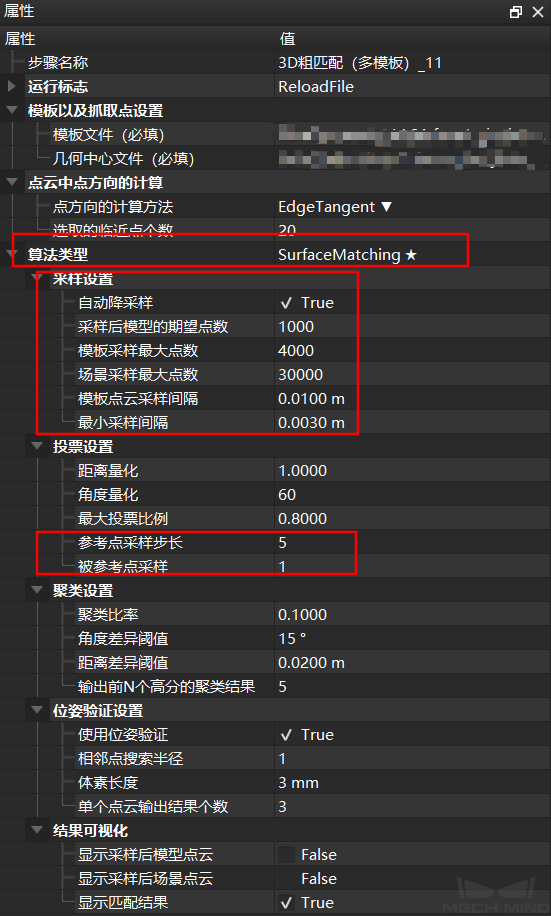
图11 3D粗匹配¶
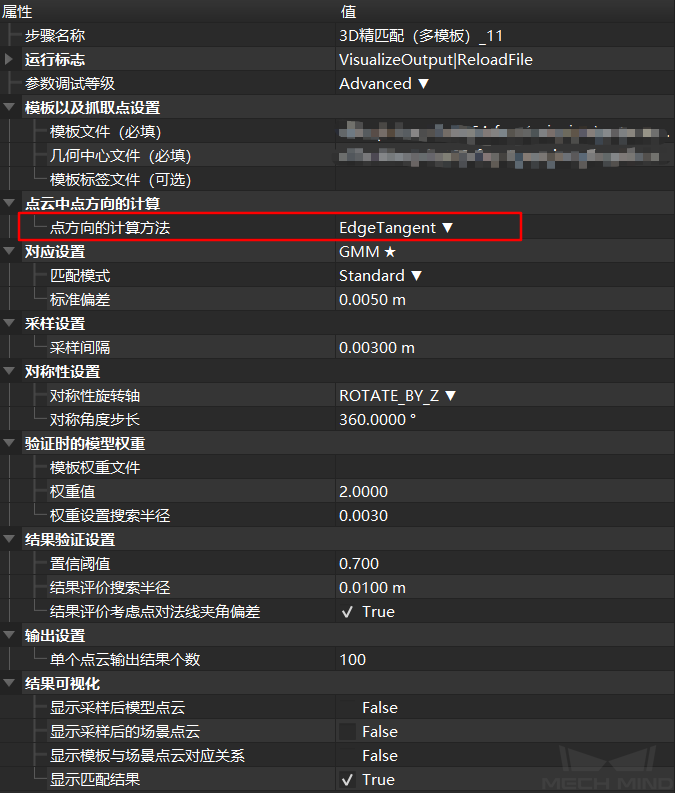
图12 3D精匹配¶
Mech-Viz、机器人¶
路径优化¶
机器人路径优化主要指的是机器人在运动过程中尽量减少非必要的定点和不必要的动作。故路径优化的中心思路为减少定点,减少弯路来实现。
小技巧
主要可以操作的包括以下内容:
减少弯路,在一段没有碰撞的运动中,尽量减少多余的中间点,保证机器人的运行流畅。
减少定点,在前期为了保证机器人运动。
减少旋转,机器人在抓取的过程中,可能会出现夹具旋转超过 180° 的情况,通过对视觉工程的控制和对对称性的调整,能够减少这类情况的发生。同时使用 相对移动 能够直接避免进行过多的旋转。
大多数运动类的步骤中加入不等待能够对机器人的流畅性有提升,减少停顿。
为了提高机器人运动路径的圆滑程度,还可以适当合理使用转弯半径的功能,避免机器人走路线上的固定点。同时使用更多的关节运动,减少使用较长的直线运动,减少机器人运动到奇异点的可能性,必要的时候使用多段关节运动代替长距离直线运动,防止长距离时运动状态不可控。
避免奇异点,根据 Mech-Viz 软件的设计,机器人在即将跨越奇异点的时候,机器人会进行适当降速以防止机器人报错。同样的,在工件抓取的过程中,应尽量避免机器人运动到奇异点附近,防止因奇异点导致的报错停止或慢速运行。
机器人速度¶
在机器人工作流程已经确定,且能够在慢速且稳定作业情况下,可以逐步将机器人速度提升至可以达到的最高速度,机器人提速能够对节拍有较大帮助。
小技巧
机器人在各个动作中的速度可以直接在Mech-Viz软件中进行调整。
移动类步骤速度¶
Mech-Viz 软件在使用移动类步骤时候, 默认为加速度 50%,速度 100%。在完成路径优化以后,可以分别对各个步骤的速度和加速度进行调整,已实现在不同情况下对机器人速度和加速度的控制。
小技巧
在机器人不抓取工件的时候,可以把速度和加速度逐步调整至允许的最大值。
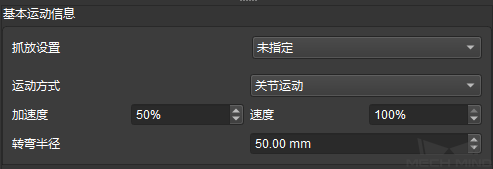
图13 Mech-Viz中移动速度控制¶
拍照流程与时机¶
在Mech-Viz软件中,可以使用 视觉识别 步骤来触发拍照,并通过Mech-Vision软件进行处理并输出结果,并且在 视觉移动 步骤时获取处理的结果并控制机器人移动到指定位置。数据处理的过程是可以在后台中运行的,即可以在机器人运动的过程中,对获取到的新数据进行处理并准备下一次抓取。
小技巧
在Eye to Hand模式下,可以实现机器人抓取工件并移开相机视野范围后,触发相机拍照并在后台处理,等机器人完成上一个工件后,即可马上抓取下一个工件。
在Eye in Hand模式下,可以在机器人抓取工件后,回到拍照位置进行拍照,并在后台进行数据处理,待机器人完成第一个工件放置后即可直接抓取第二个工件。
提示
在一些纸箱拆垛的项目中,在保证每次抓取后其他箱子不会发生变化的情况下,可以使用一拍多抓的方案。Mech-Vision软件在每次识别的过程中,可以一次识别多个物体并给出全部的位姿。因此可以实现一次识别,机器人把所有识别到的纸箱全部抓取,并在抓取完以后重新拍照,这样能够节约大量的相机时间。
同样,若夹具足够大,也可以控制实现一次抓取多个位置的箱子,以提高抓取节拍。