Kawasaki (가와사키) 인터페이스 프로그램 복제¶
이 부분에서는 다음 5개 단계를 포함하여 표준 인터페이스 프로그램을 Kawasaki 로봇에 복제하는 방법을 소개합니다.
컨트롤러 및 소프트웨어 버전 확인¶
컨트롤러: E 시리즈 및 F 시리즈.
네트워크 연결 설정¶
하드웨어 연결¶
네트워크 케이블을 사용하여 제어 캐비닛 패널의 네트워크 포트를 IPC의 네트워크 포트에 연결합니다.
로봇 제어 캐비닛의 CPU 마더보드에는 두 개의 네트워크 포트가 있으며 두 네트워크 포트의 IP 주소는 서로 독립적입니다. 네트워크 포트 1(상단)은 일반적으로 제어 캐비닛의 전면 패널에 연결되고 네트워크 포트 2(하단)는 일반적으로 보류 포트로 사용됩니다.

IP 설정¶
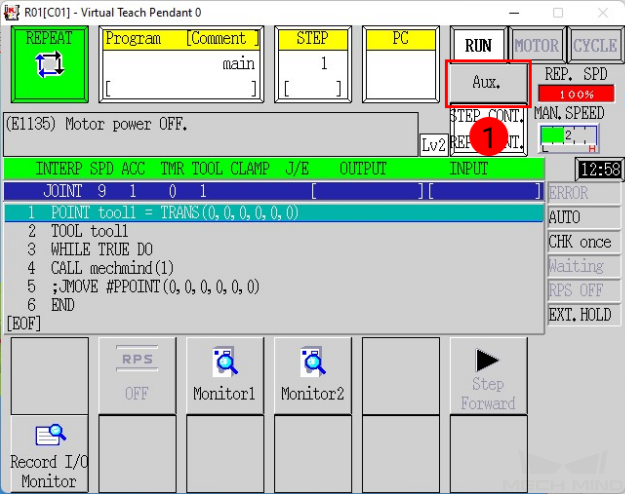
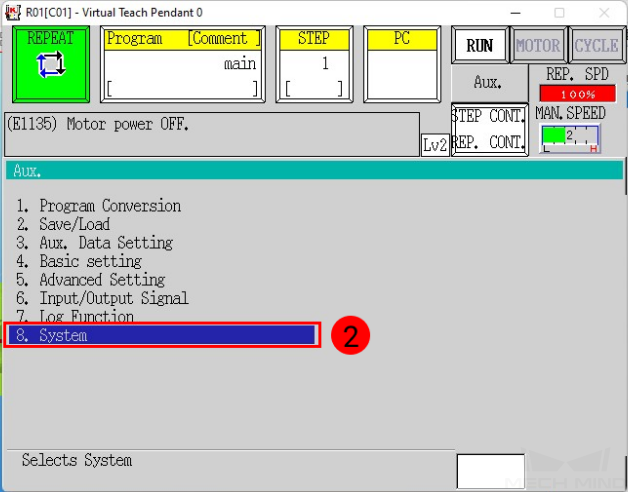
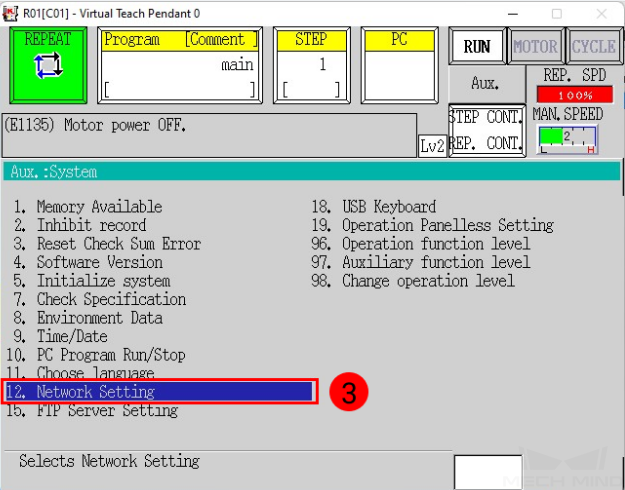
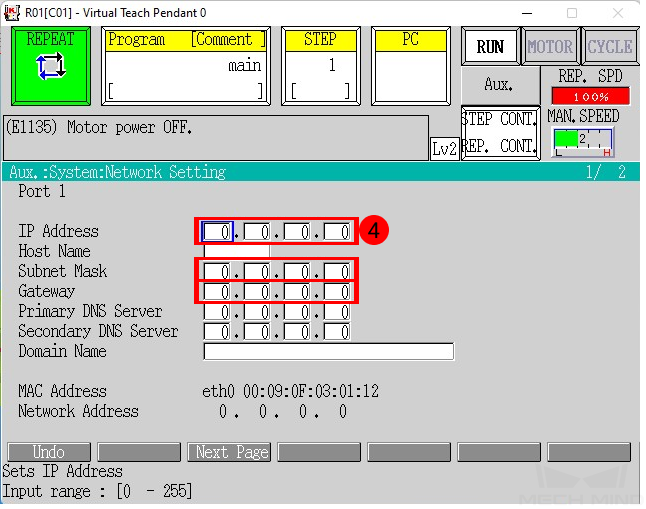
로봇 네트워크 포트의 IP 주소를 설정할 때 먼저 티치펜더트에서 Aux. 버튼을 클릭한 다음 순서대로 을 클릭합니다.
포트 1 페이지에서 로봇 네트워크 포트 1의 IP 주소와 서브넷 마스크를 설정합니다(로봇 IP 주소는 IPC 네트워크 포트 주소와 동일한 네트워크 세그먼트에 있어야 함). 네트워크에서 게이트웨이 장치를 사용하는 경우 게이트웨이 주소도 설정해야 합니다.
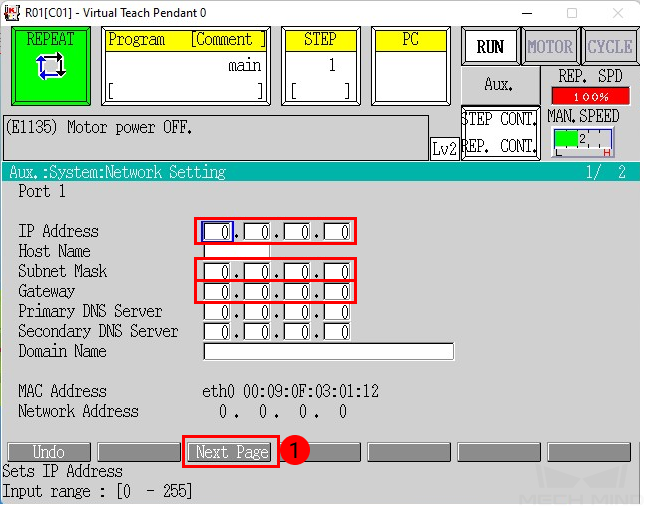
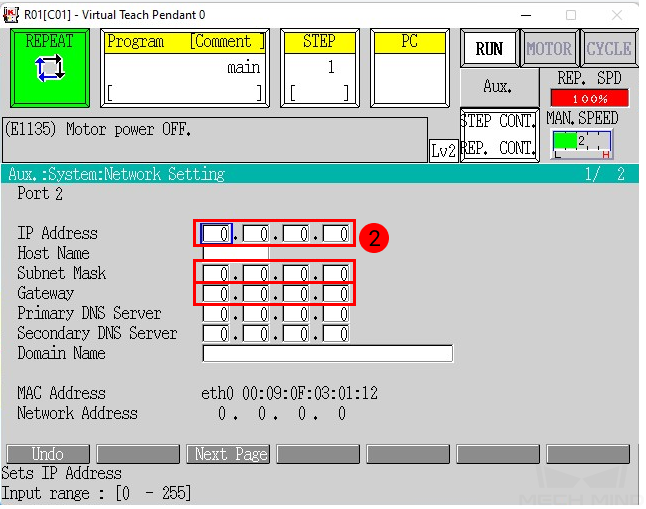
로봇이 네트워크 포트 2에 연결된 경우 포트 1 페이지 하단의 Next Page 를 클릭하여 설정을 위한 포트 2 설정 페이지로 들어갑니다.
IP 주소가 설정되면 티치펜더트의 Login 버튼을 눌러 확인하고 제어 캐비닛의 전원을 껐다 켭니다.
파일을 로봇에 복제하기¶
파일을 선택하기¶
로봇 복제 파일은 Mech-Center 소프트웨어의 설치 경로에 있습니다. XXXX/Mech-Center-xxx/Robot_Interface/KAWASAKI .
mm_module.as 파일을 USB의 루트 디렉터리에 복사한 다음 USB를 제어 캐비닛 패널의 USB 포트에 삽입합니다.

복제하기 전 주의사항¶
사용자 프로그램 저장
힌트
티치펜더트의 프로그램 리스트에 사용자 프로그램이 있는 경우 복제하기 전에 백업을 저장해야 합니다. 티치펜더트에 사용자 프로그램이 없으면 이 단계를 건너뛸 수 있습니다.
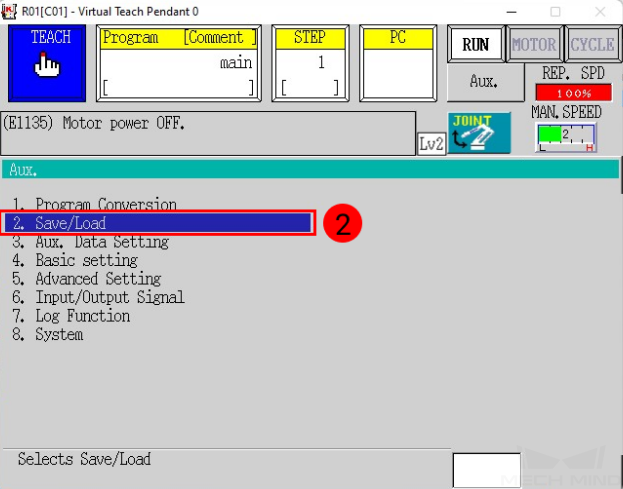
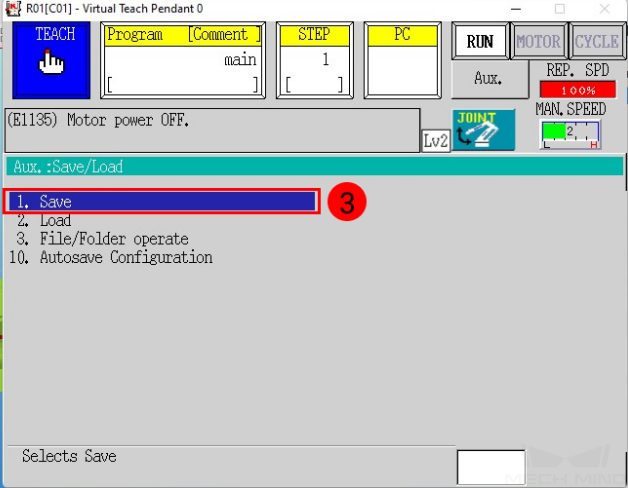
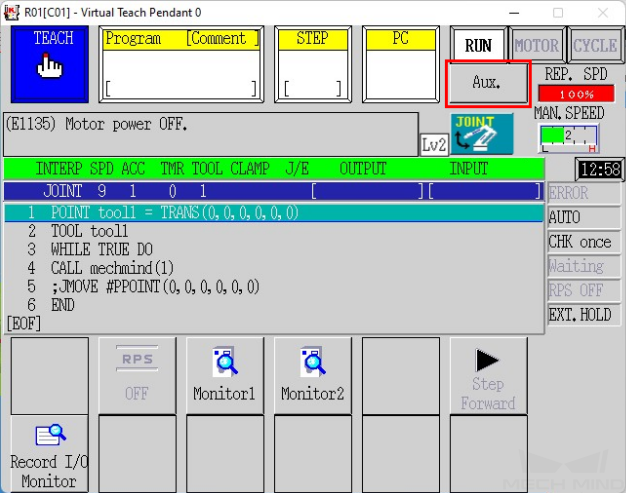
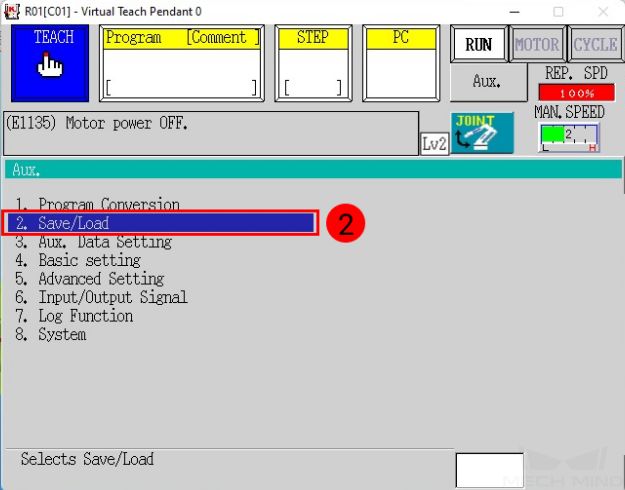
Aux. 버튼을 클릭한 다음 순서대로 클릭합니다.
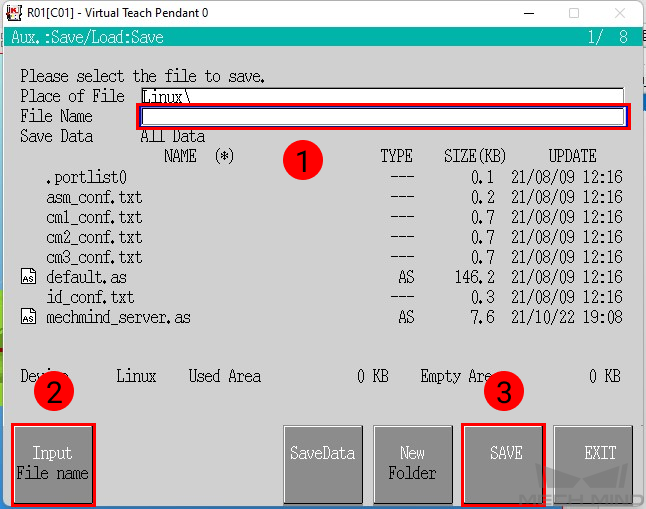
저장 페이지에서 먼저 파일 이름을 클릭한 다음 Input File name 버튼을 클릭하여 파일 이름을 입력한 다음 SAVE 버튼을 클릭해야 합니다. 저장 후 티치펜더트의 R 키를 눌러 메인 페이지로 돌아갑니다.
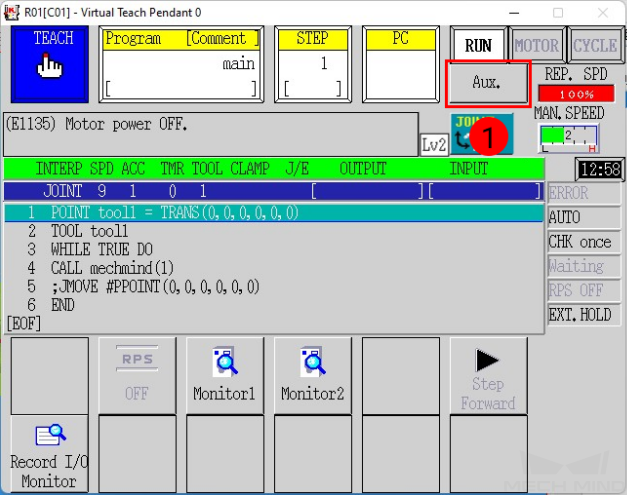
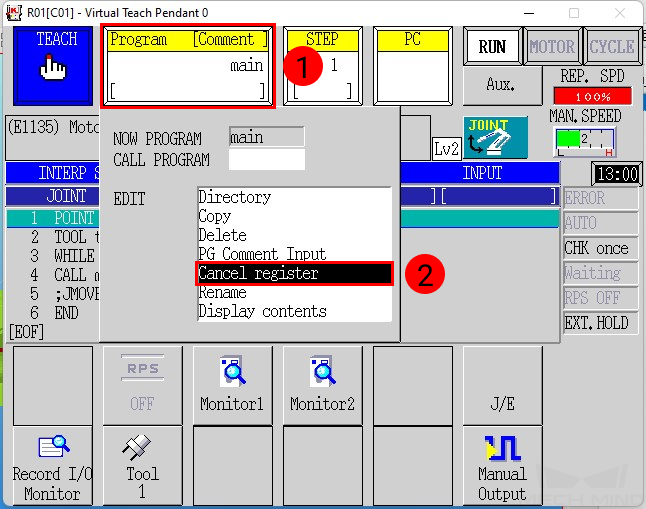
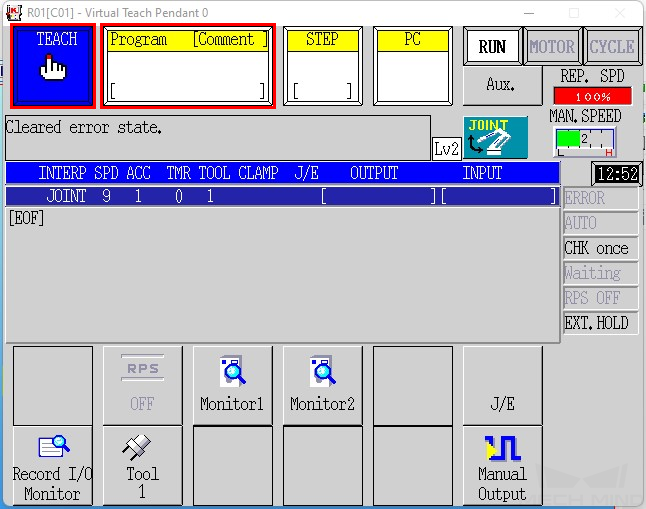
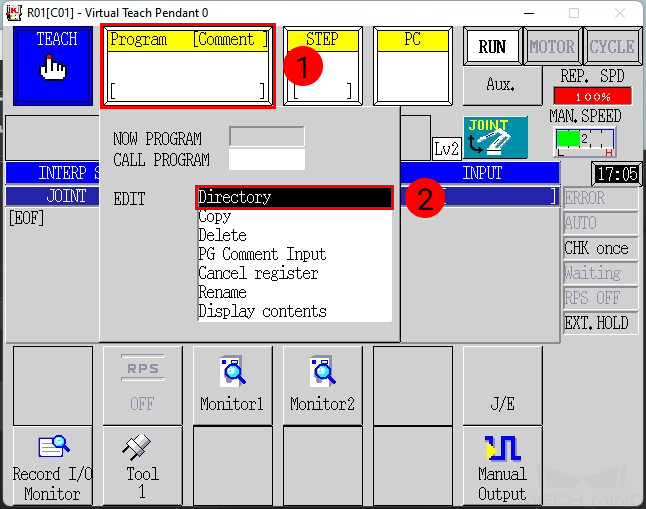
프로그램을 복제하기 전에 티치펜더트의 프로그램 창을 확인하여 창에 등록된 프로그램이 없는지 확인하십시오. 프로그램이 있으면 아래 그림에 따라 로그아웃하십시오.
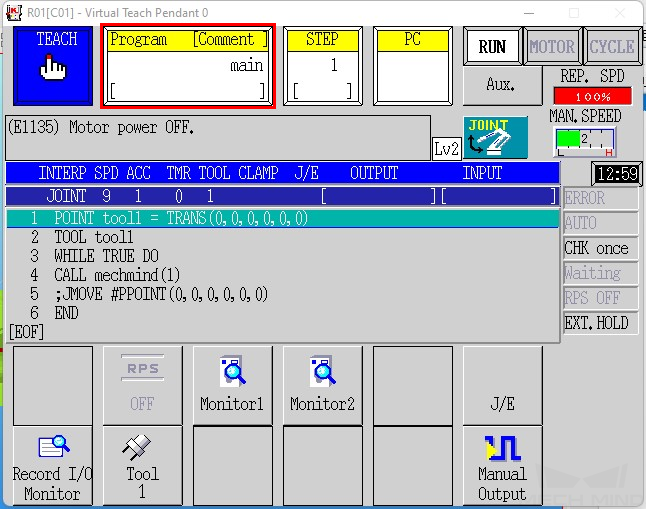
또한 프로그램을 복제하기 전에 로봇은 티칭 상태이어야 합니다. 확인되면 티치펜더트의 화면은 아래 그림과 같습니다.
프로그램 복제¶
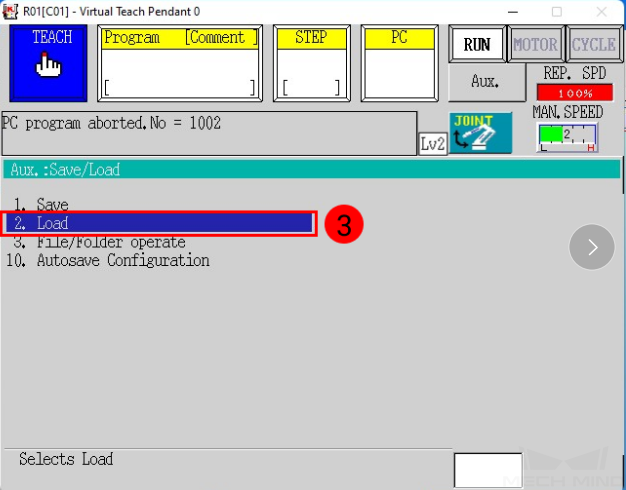
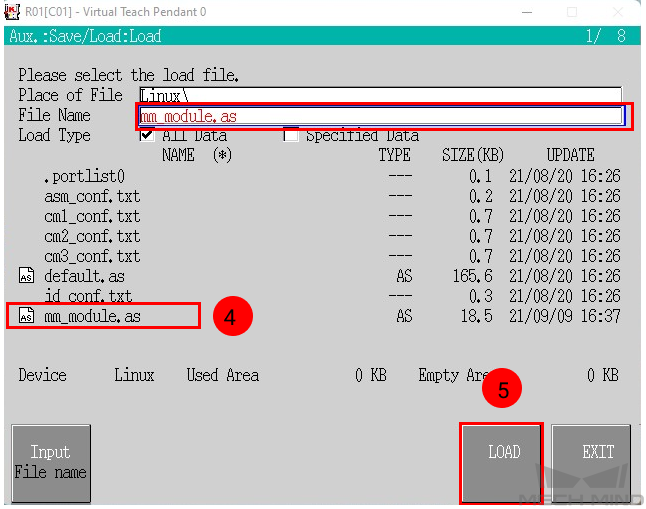
티치펜더트에서 Aux. 버튼을 클릭하고 를 선택하고 프로그램 파일 mm_control.as 를 더블 클릭하여 선택하면 파일 이름에 mm_control.as 가 표시됩니다. 그다음 Load 를 클릭합니다.
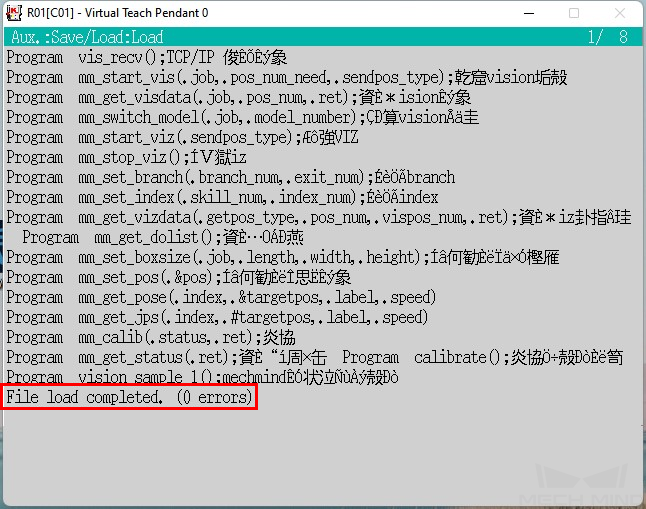
로딩 후 로딩 오류가 없는지 확인합니다. 종료하려면 티치펜더트에서 R 키를 누르십시오.
IPC 파라미터 설정¶
Mech-Center 소프트웨어에서 인터페이스 파라미터 구성¶
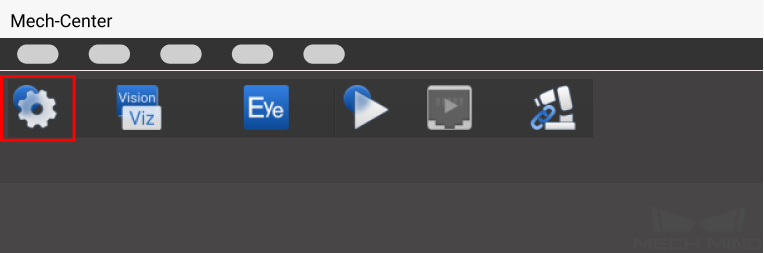
Mech-Center 소프트웨어를 시작하고 구성 설정 을 엽니다.
왼쪽의 Mech-Interface 를 클릭하여 Mech-Interface 화면으로 들어가 Mech-Interface 실행하기 를 선택합니다.
인터페이스 서비스 유형을 표준 인터페이스로 선택합니다.
인터페이스 옵션은 TCP Server,ASCII 를 선택합니다.
기지의 로봇 옵션에서 KAWASAKI를 선택하고 실제 로봇과 동일한 모델을 선택합니다.
로봇 모델이 기지의 로봇 모델 리스트에 없으면 자체 정의 로봇을 선택하고 오일러 각도 유형을 “rzyz”로 채울 수 있습니다.
기본 포트 번호는 50000입니다. 다른 포트 번호로 변경해야 하는 경우 로봇이 지원하는 포트 범위(8192-65535)를 참조하십시오.
저장 을 클릭하여 설정한 데이터를 저장합니다.

인터페이스 실행¶
Mech-Center 소프트웨어의 메인 인터페이스에서 인터페이스 실행
 을 클릭하여 인터페이스를 시작하고 로봇 측의 프로그램 연결을 기다립니다.
을 클릭하여 인터페이스를 시작하고 로봇 측의 프로그램 연결을 기다립니다.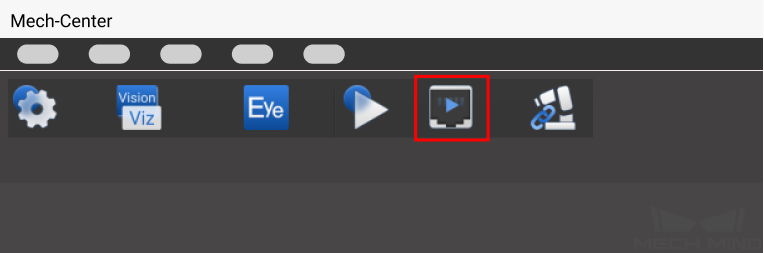
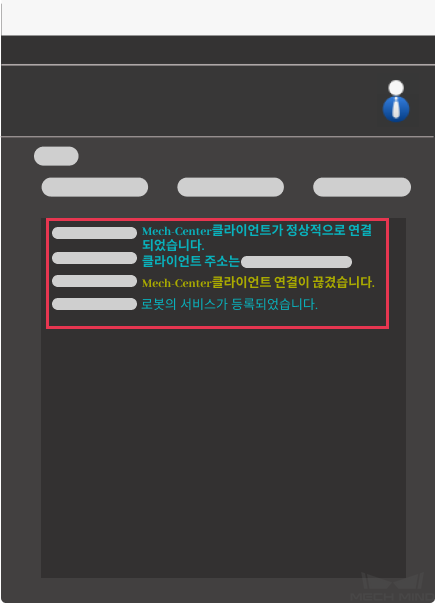
아래와 같은 인터페이스가 표시되면 인터페이스 서비스가 성공적으로 활성화된 것입니다.

로봇 연결 상태 테스트¶
로봇 통신 테스트 프로그램 선택 및 수정¶
주의
vision_sample_1 프로그램을 실행하기 전에 조건 을 충족해야 합니다.
티치펜더트에서 포그라운드 프로그램 vision_sample_1 을 선택하고, 프로그램 창을 클릭하고, 리스트에서 vision_sample_1 프로그램을 선택하고, 티치펜더트에서 Login 버튼을 눌러 확인합니다.
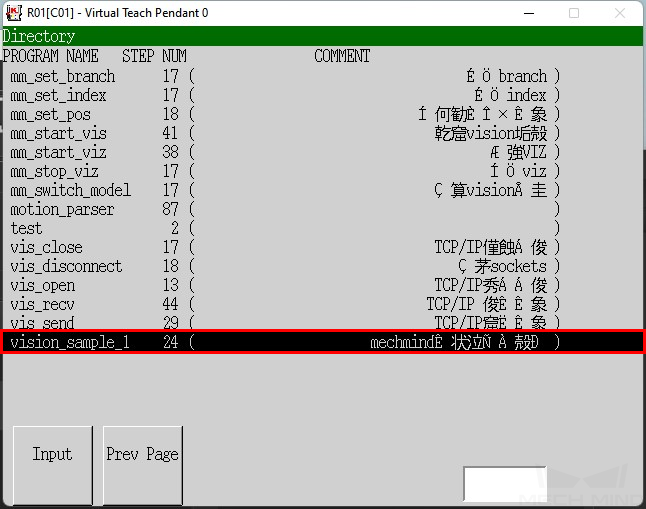
다음 그림과 같이 포그라운드 프로그램이 추가됩니다.
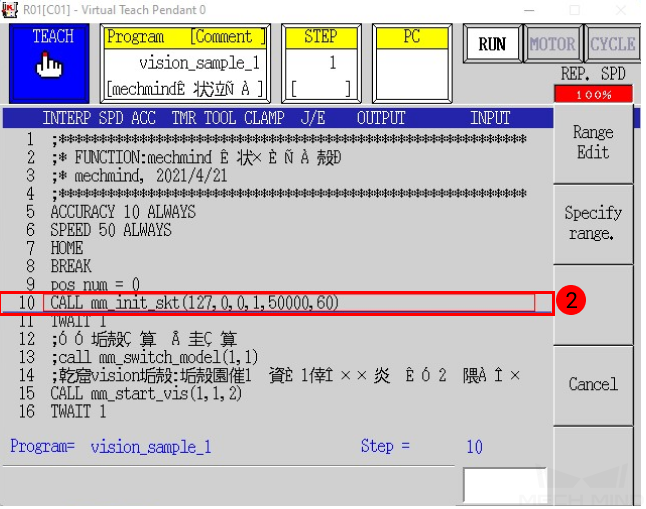
vision_sample_1 프로그램의 10번째 줄을 수정하고 127, 0, 0, 1을 실제 IPC 컴퓨터의 IP 주소로 변경하고 50000을 실제 Mech-Center 에 설정된 호스트 포트 번호입니다.
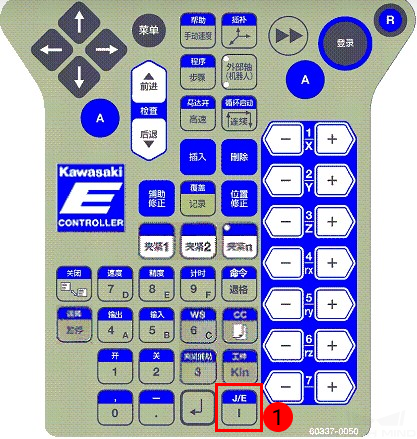
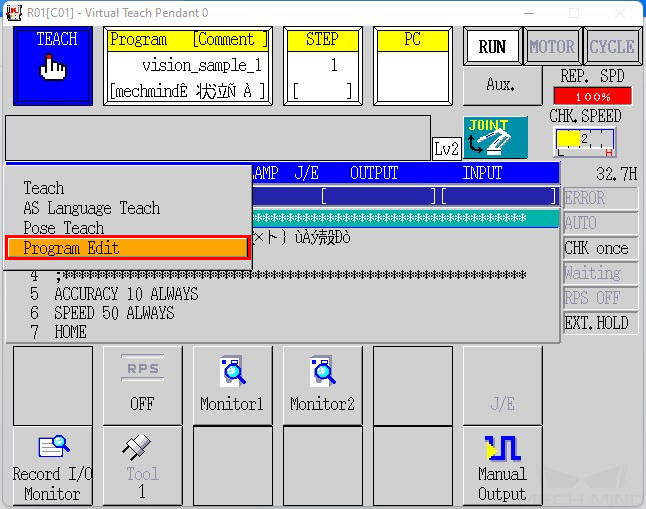
티치펜더트에서 J/E 키를 누르고 팝업 메뉴에서 Program Edit 를 클릭하여 선택하고 Login 키를 눌러 확인합니다.
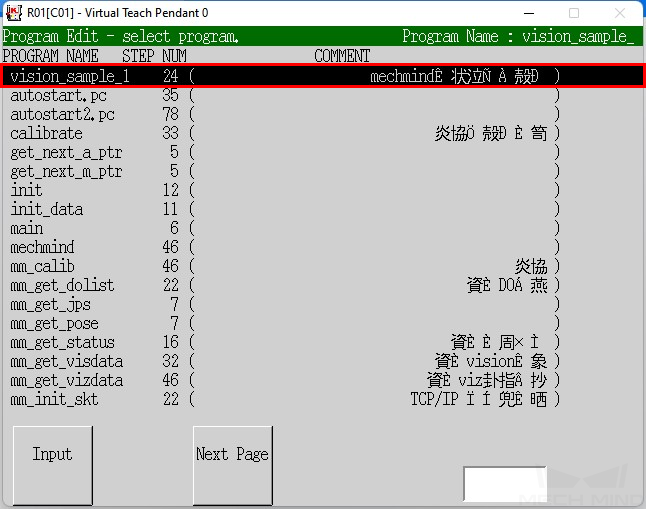
프로그램 표시 리스트에서 vision_sample_1 을 선택하고 Login 을 눌러 확인합니다.
티치펜더트의 화살표 키를 사용하여 빨간색 프레임을 10번째 줄 오른쪽으로 이동하고 Login 키를 눌러 확인합니다.
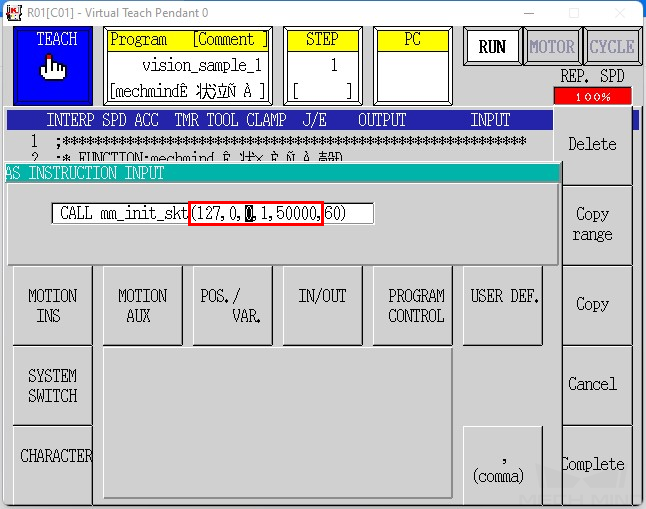
티치펜더트의 방향키를 이용하여 입력박스의 커서를 해당 위치로 이동하고, 127, 0, 0, 1을 IPC의 IP 주소로 수정하고, 50000을 Mech-Center 소프트웨어에 설정된 호스트 포트 번호로 수정합니다. 수정 후 Login 키를 눌러 확인하고 R 키를 눌러 종료합니다.
팝업된 확인 창에서 Yes 를 선택한 다음 Close 를 선택합니다.
테스트 프로그램을 실행¶
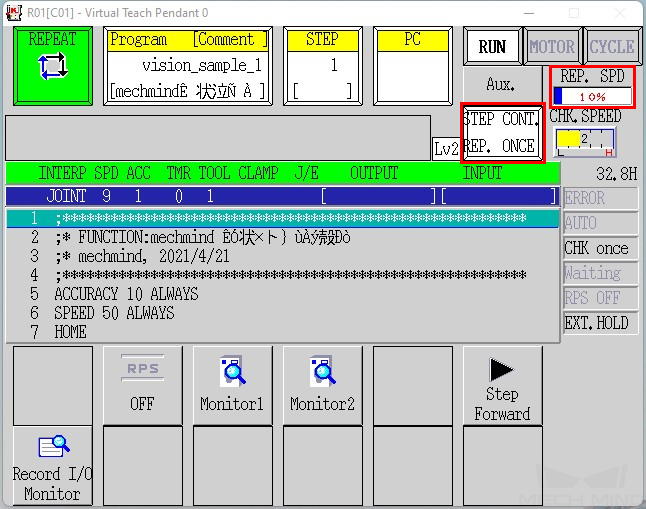
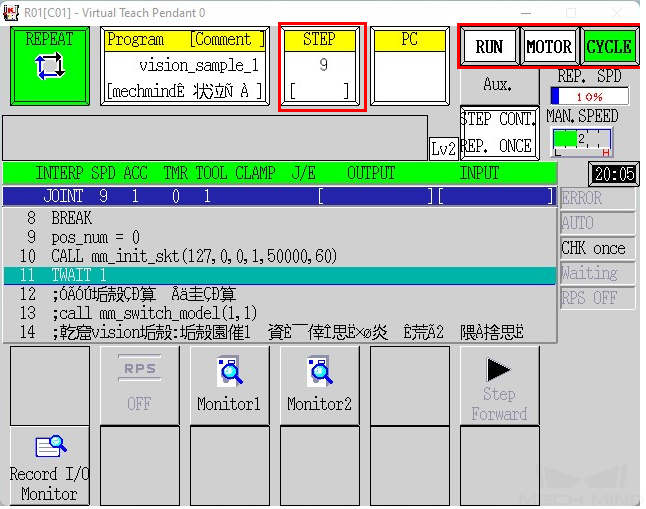
컨트롤러를 REPEAT 로 전환하고 재생 속도를 10 % 로 조정합니다. 재생 모드는 단계 연속, 한 번 반복 으로 조정됩니다.
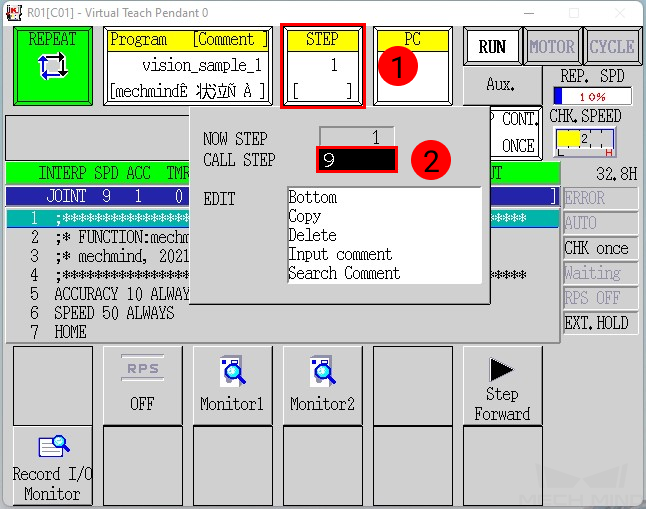
1단계부터 시작하면 로봇이 먼저 Home 포인트로 돌아가게 되며, 테스트 중 로봇이 Home 포인트로 돌아오는 것을 원하지 않고 로봇을 현재 위치에 유지하여 통신 연결을 테스트하기만 하려면, 단계1을 9로 변경하고 Login 키를 눌러 확인하면 7번째 명령줄을 건너뛸 수 있습니다.
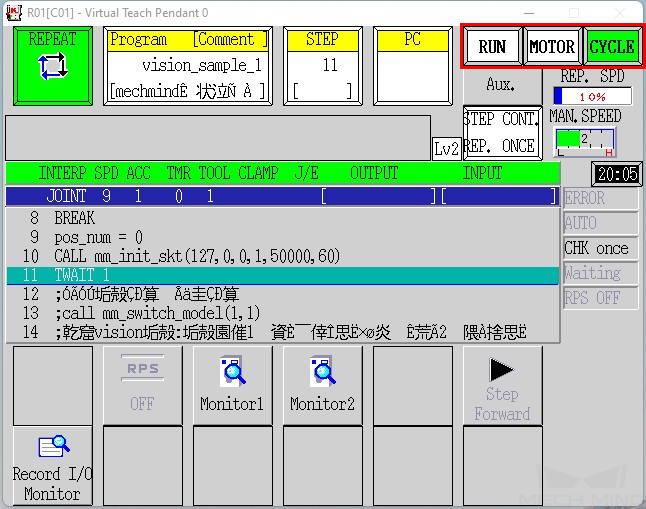
티치펜더트의 A 키를 누른 상태에서 MOTOR 를 클릭하여 MOTOR 를 켜십시오. 티치펜더트의 A 키를 누른 상태에서 CYCLE 을 클릭하여 CYCLE 을 켜십시오. RUN 에 불이 들어오지 않으면 A 키 -> 일시정지/실행 키를 차례로 누릅니다.
Mech-Center 소프트웨어의 로그바에 다음 정보가 표시되면 연결이 성공한 것입니다.