카메라 관련 구성¶
구체적인 인터페이스는 다음과 같습니다.
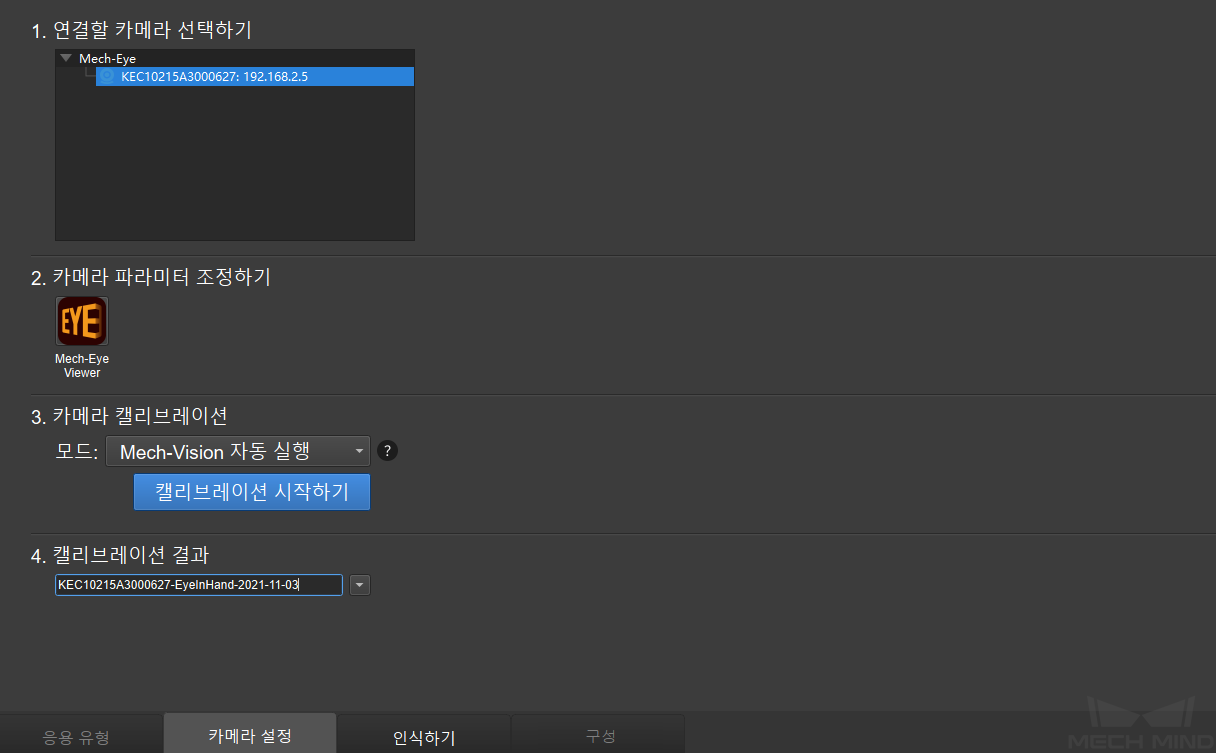
원하는 카메라를 선택하세요.
카메라 리스트에서 연결할 카메라를 선택하고 성공적으로 연결되면 나머지 스텝을 활성화시킬 수 있습니다.
카메라 파라미터를 조정하기:
Mech-Eye Viewer 카메라 뷰어를 통해 카메라 파라미터를 조절합니다. 더 많은 카메라 파라미터 조절 내용은 ` 파라미터 조절 <https://docs.mech-mind.net/latest/ko-KR/MechEye/MechEyeViewer/UsingMechEyeViewer/ParameterAdjustments/ParameterAdjustments.html>`_ 를 참고하세요.
카메라 캘리브레이션:
카메라 캘리브레이션의 목적은 로봇과 카메라의 위치 관계를 결정하기 위해 카메라의 파라미터 파일을 생성하는 것입니다.
드롭다운 메뉴를 클릭하여 Mech-Vision 자동 실행 혹은 티치펜더트 수동 실행 모드를 선택할 수 있습니다.
Mech-Vision 자동 캘리브레이션 모드를 사용하려면 로봇과 연결해야 합니다. ? 를 클릭하여 힌트에 따라 로봇을 연결하면 됩니다.
캘리브레이션을 시작하기 를 클릭하여 힌트에 따라 캘리브레이션을 완성하십시오. 캘리브레이션과 관련된 더 많은 정보는 로봇 핸드-아이 캘리브레이션 사용 가이드 를 참고하세요.
캘리브레이션 결과:
대응하는 외부 파라미터 파일을 자동으로 선택하고 수동으로 처리할 필요가 없습니다.