Mech-Center로 로봇을 실행하여 첫 피킹을 실현하기¶
이전 스텝의 구성 완료를 통해 사용자는 성공적으로 상자의 포즈를 획득했습니다. 또한 과정을 성공적으로 시뮬레이션했습니다. 지금부터 실제 로봇을 운영하여 첫 피킹을 시도해 볼 수 있습니다.
로봇 운동 속도 감소¶
주의
실제로 로봇을 실행하기 전에 사고를 방지하기 위해 로봇의 운동 속도를 반드시 줄여야 합니다!
Mech-Viz 툴 바에서 속도 및 가속도 를 5%로 조정합니다.

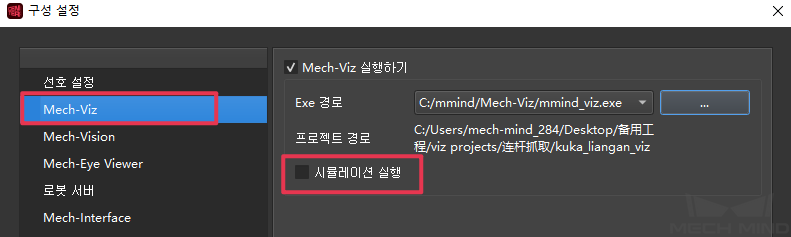
시뮬레이션을 언체크하기¶
실행¶
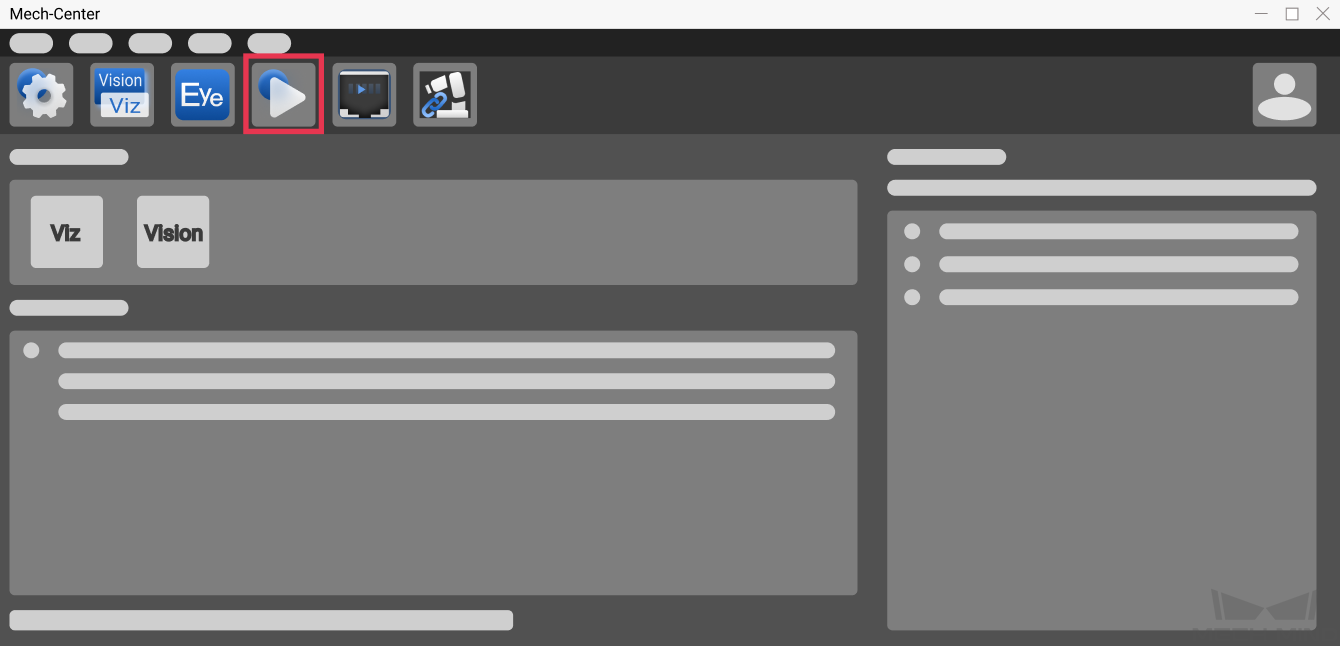
실행 을 클릭 한 후 로봇이 계획된 경로대로 이동하고 종이 상자 피킹과 배치를 할 수 있다면 성공적으로 완료한 것입니다!
주의
로봇 운영 시 인원 안전을 확인하세요. 긴급 상황 발생 시 티칭 머신에 있는 비상정지 버튼을 누르세요!
지금까지 “첫 응용 프로그램 시작하기” 의 모든 내용이 완료되었습니다. 사용자는 실제 수요에 따라 다른 챕터 내용을 확인하여 메크마인드 관련 제품에 대해 자세히 알아볼 수 있습니다!