ETHキャリブレーションの基本原理¶
ロボットのエンドにフランジを介して既知寸法のキャリブレーションボードを取り付け、ロボットのベース座標に対するキャリブレーションボード(calibration board)の各マークポイントの座標Aを取得できます。カメラでキャリブレーションボードの各ドットの画像を取得し、キャリブレーションボードの各マークポイントに対するカメラの光学中心の座標Bを取得できます。カメラの光学中心とロボットのベース座標(Base)との位置姿勢の関係Xは、未知数とします。したがって、A、B、Xはループとなり、方程式を生成し、その方程式で未知数Xを計算できます。キャリブレーションボードとフランジエンドの位置関係Cは未知です。キャリブレーションプロセスでキャリブレーションボードの一連の相対移動により、キャリブレーションボードとフランジエンドの位置関係が数値法で計算され、次にAが計算されます。ロボットを移動させ、カメラに対するキャリブレーションボードの位置姿勢を変更することにより、複数グループの方程式を取得できます。これらの方程式の値のフィッティング最適化計算を実行し、最終的に最適なX値を取得します。位置姿勢の関係は、図1に示します。
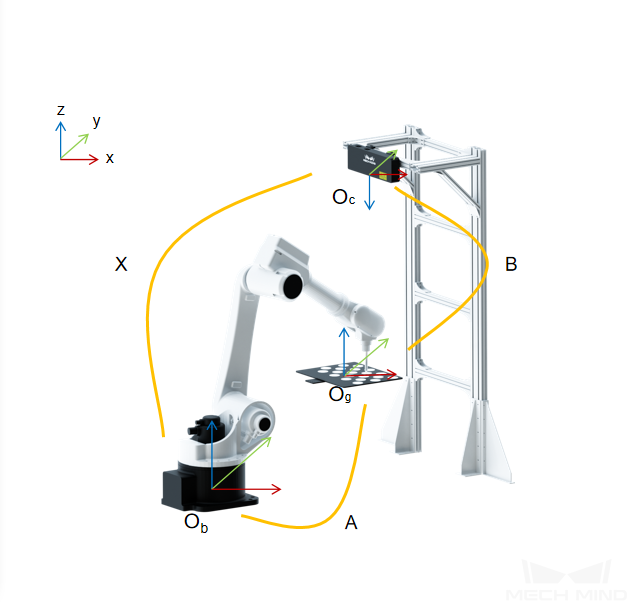
図1 ランダムな複数キャリブレーショボード位置姿勢(ETH)¶
図2に示すように、TCPタッチ方法によるキャリブレーションする場合、キャリブレーションボードを作業平面に置き、ロボットのエンドに既知寸法のTCPタッチポイントを取り付けます。次に、キャリブレーションボード上のドットにタッチします。AとBの値が既知で、Xの値を求められます。キャリブレーションボードとロボットのエンドは固定されておらず、Aの値は、キャリブレーションボードのマークポイントをTCP座標が既知なタッチポイントにタッチさせることによって計算されます。
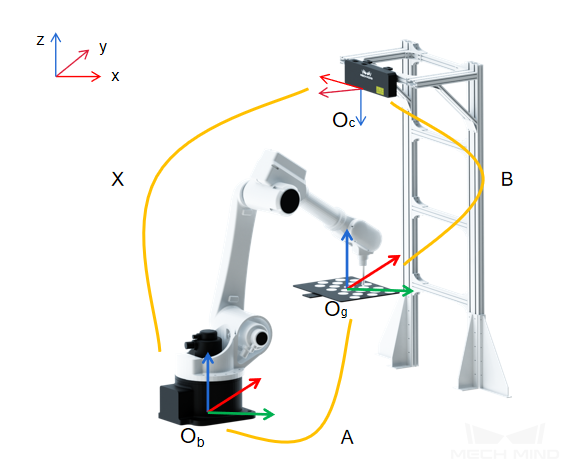
図2 TCPタッチ方法(ETH)¶
ヒント
ETH方式でカメラの光学中心とロボットベース座標の位置姿勢関係を校正します。ロボットのベース座標やカメラが移動すれば、対応する外部パラメータはそれに応じて変化するので、再校正する必要があります。