EIHキャリブレーションの基本原理¶
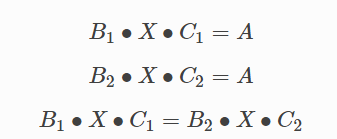
カメラがロボットエンドの固定スタンドに取り付けられ、ロボットのエンドフランジ中心とカメラ光学中心との相対位置は固定です。それは、図1の未知変数Xです。ロボットのベース座標系(Base)に対するエンドフランジ中心の位置姿勢は、既知変数Bとします。カメラはキャリブレーションボード(calibration board)の画像をキャプチャし、カメラの光学中心とキャリブレーションボード上の各ドットとの位置姿勢の関係を取得し、既知変数Cを取得できます。キャリブレーションボードは、カメラの視野内に平らに置かれて、ロボットのベース座標に対する相対位置姿勢は、固定値Aとします。このように、変数A、B、C、Xはループを形成します。以下の方程式には、 Aが定数値なので、最初の2つの方程式から得た新しい方程式では、Xだけが未知数です。ロボットエンドの位置姿勢を変更して、さまざまな角度から画像をキャプチャすることにより、複数セットのA、B、Cの値を取得します。それらを使用してフィッティング計算してXの最適値を取得します。
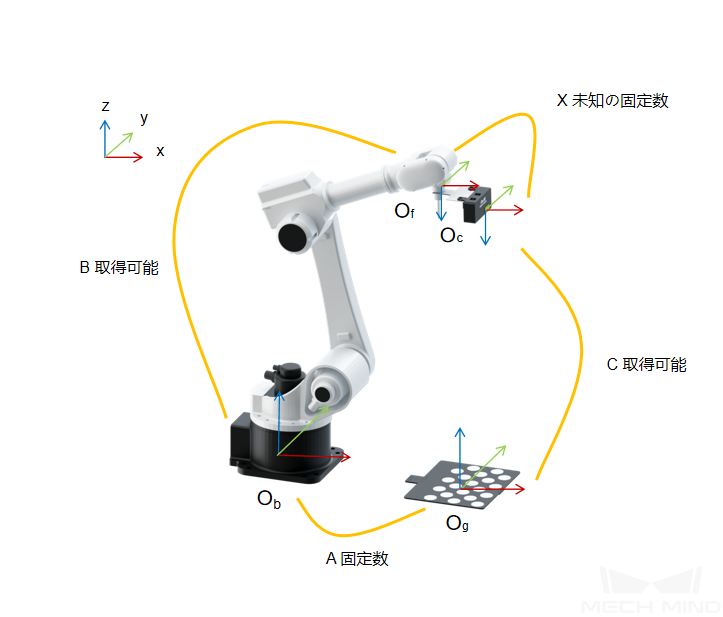
図1 ランダムな複数キャリブレーショボード位置姿勢(EIH)¶
TCPタッチ方法でキャリブレーションする場合、キャリブレーションボードを作業平面に置き、ロボットのエンドに既知寸法のTCPタッチポイントを取り付けます。次に、キャリブレーションボードのドットにタッチさせます。その原理は、図2に示します。A、B、Cの値が既知なので、Xの値も求められます。
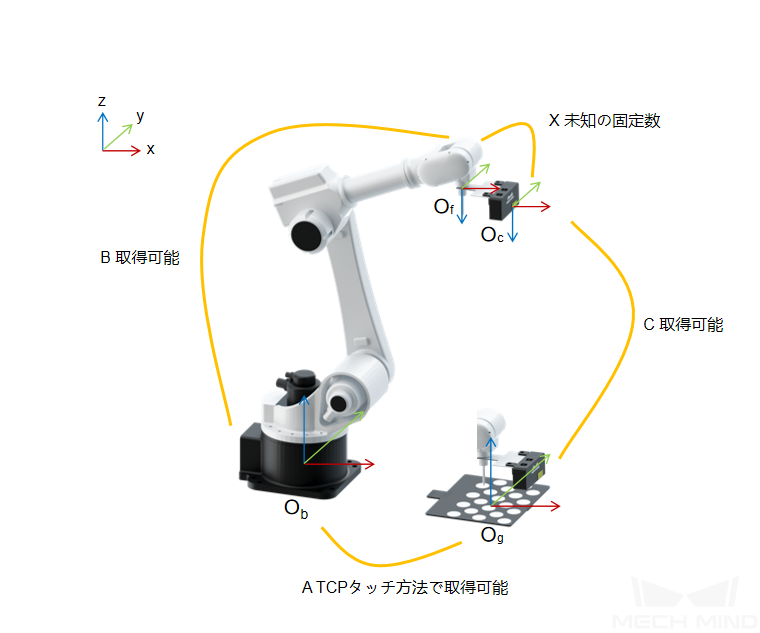
図2 TCPタッチ方法(EIH)¶
EIH方式では、カメラの光学中心とロボットのエンドフランジ中心との位置姿勢の関係を校正します。カメラがロボットのエンドフランジの中心座標に対して移動する場合、対応する外部パラメータはそれに応じて変化するため、再校正する必要があります。