비전 기록 설정¶
이 기능은 주로 디버깅에 쓰입니다. Mech-Vision 프로젝트 실행 후 보낸 비전 결과를 저장하고 사용자들은 기존의 비전 기록을 직접 사용할 수 있으며 Mech-Vision 프로젝트를 다시 열 필요가 없어서 특정한 위치 및 문제를 찾기가 편리해집니다.
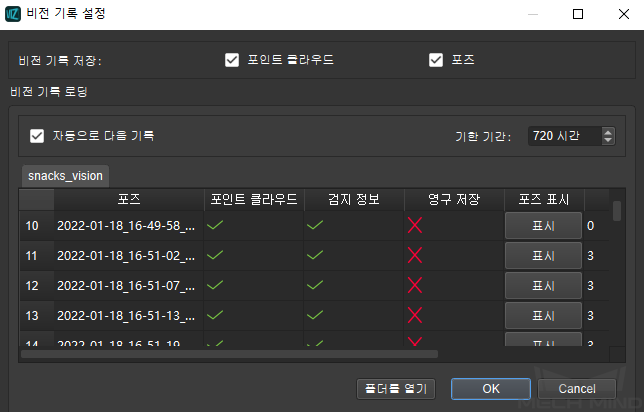
비전 기록 저장: 기본적으로 json파일 식으로 포즈를 자동으로 저장합니다. 포인트 클라우드 데이터를 저장하려면 포인트 클라우드를 선택하면 됩니다. 단, 주의해야 할 것은 포인트 클라우드 파일이 크고 포인트 클라우드가 존재하는 시나리오에 이미지를 한번 캡처하면 하나의 포인트 클라우드 파일이 생성되고 저장될 것입니다. 따라서 불필요하게 하드 디스크 공간을 낭비하지 않도록 포인트 클라우드 옵션은 테스트 기간에만 선택하고 소프트웨어가 안정적으로 실행할 때 언체크해야 합니다.
비전 기록 로딩
자동으로 다음 기록 로딩: 선택하지 않으면 이전에 선택한 기록을 다시 사용할 것입니다. 선택할 때, 현재 기록을 사용한 다음에 자동으로 다음 비전 기록으로 넘어갈 것입니다. 마지막 기록까지 사용하면 자동으로 현재 리스트를 순환하지 않고 새로운 비전 기록이 없다는 것으로 끝날 것입니다.
기한 시간: 기한 시간을 설정합니다. 기본값은 9999시간인데 설정한 시간을 초과하면 파일은 자동으로 삭제될 것입니다.
폴더를 열기: 비전 결과가 저장되어 있는 폴더를 직접 열 것입니다.
영구 저장: 영원히 저장하려고 하는 비전 결과를 선택하여 마우스 오른쪽 버튼을 눌러 영구 저장하면 해당 비전 기록은 기한 시간이 지나도 삭제되지 않을 것입니다.
비전 기록을 사용하여 비전 결과가 없는 경우에 신속하게 문제를 재연합니다.¶
재연하는 방식 |
필요한 데이터 |
데이터 저장 경로 |
|---|---|---|
비전 기록을 사용하여 비전 결과가 없는 경우에 신속하게 문제를 재연합니다. |
비전 포즈 |
Mech-Viz 소프트웨어 패키지에 있는 vision_records 폴더 안에 있습니다. 각종의 서비스 폴더 아래의 날짜 폴더 안에 문제를 해결하는 데 필요한 하나 혹은 여러 개의 비전 기록 파일을 선택하여 로드합니다. 폴더 예시:vision_recordsvisionSimu2019-08-052019-08-05_173341869.json |
비전 포즈, 포인트 클라우드 정보 |
Mech-Viz 소프트웨어 패키지에 있는 vision_records 폴더 안에 있습니다. 각종의 서비스 폴더 아래의 날짜 폴더 안에 문제를 해결하는 데 필요한 하나 혹은 여러 개의 비전 기록 파일을 선택하여 로드합니다. 일반적으로 한 그룹에는 3개의 파일이 있으며 이 3개의 파일은 접미사를 제외하고 파일 이름이 같습니다. 각각 다음과 같습니다: 비전 포즈 파일(.json),포인트 클라우드 파일(.cloud)및 포인트 클라우드 포즈 파일(.transform,없는 경우도 종종 있음) |
|
vision 서비스를 호출해야 재연할 수 있습니다. |
이미지(뎁스맵、컬러 맵) |
vision 프로젝트에 캡처된 이미지를 저장하는 경로 |