계획 기록을 표시하기¶
이 기능은 소프트웨어 계획의 전반 과정을 완전하고 상세하게 기록하기 때문에 로그에 표시되는 출력 내용보다 계획의 모든 스텝을 상세하게 확인할 수 있습니다(특히 실패한 스텝). 아래의 그림과 같습니다:
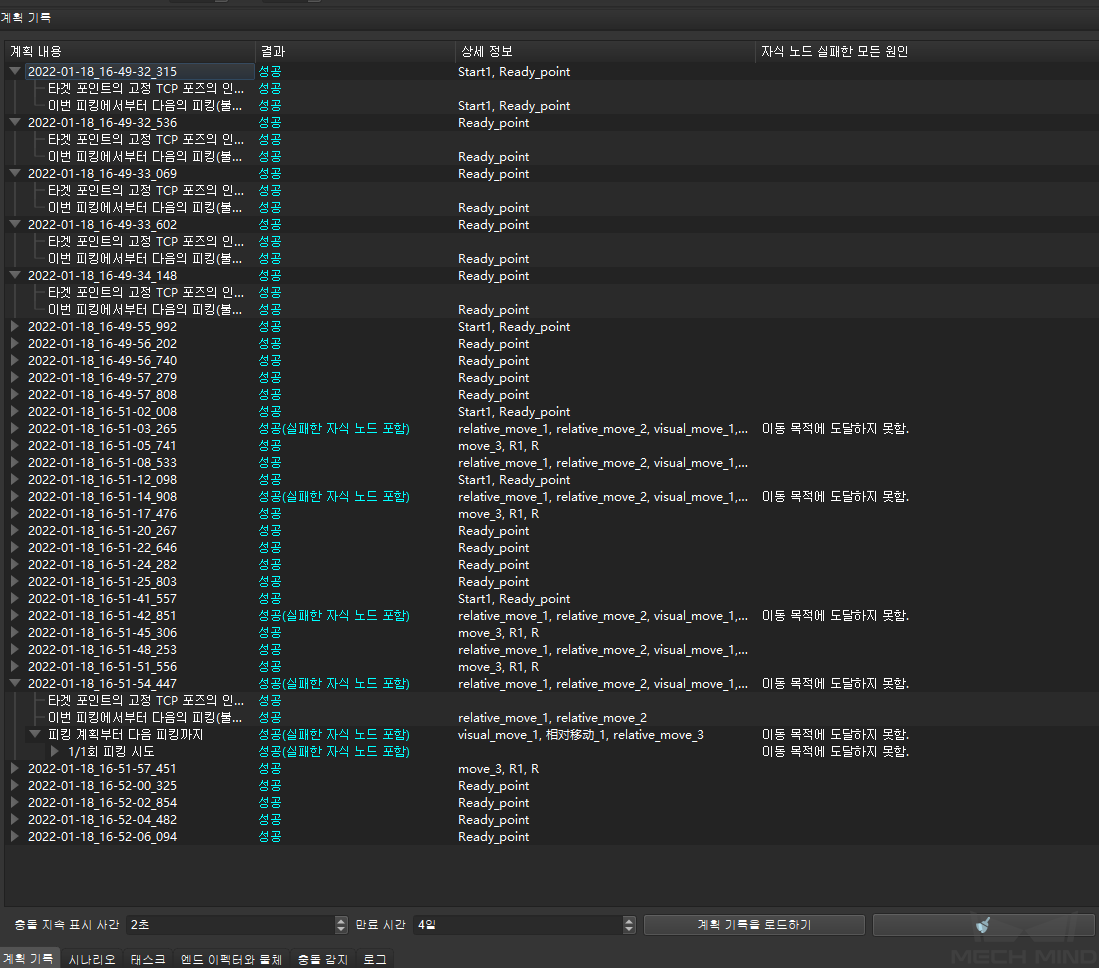
계획 결과의 전체적인 구조는 트리 구조이고 연속 계획의 오류이든 병행 계획의 오류이든 최종 성공 여부는 《값》 표시줄에 표시돼서 사용자가 실패한 스텝만 유의하면 됩니다.
연속 계획의 오류: 계획 시 일환이 실패되면 전반적인 실패를 초래합니다. 예를 들어 로봇은 이동 태스크를 실행할 때 어떤 관절 각도는 도달할 수 없는 경우입니다.
병행 계획의 오류: 계획 시 일환이 실패해도 전반에 영향을 미치지 않으며 성공한 부분만 있으면 전반적으로 성공한다고 여깁니다. 예를 들어 Vision을 통해 얻은 피킹 포즈 중에 피킹 가능한 것이 하나만 있다면 피킹할 수 있다는 것으로 간주됩니다.
루트 노드 설명¶
파라미터: 루트 노드가 시간으로 명명되고 앞에 history가 붙이지 않은 것은 실시간으로 실행한 결과이며 앞에 history가 붙이는 것은 페이지 오른쪽 밑에 있는 계획 기록을 로드하기 를 클릭하여 로드한 결과 기록입니다.
값: 소프트웨어의 계획 결과이며 레벨을 편 후 성공 또는 실패에 대한 구체적인 이유가 표시될 것입니다.
설명:계획의 시작 및 종료 태스크, 그리고 이번 계획 과정속의 태스크의 총 개수를 표시합니다.
오류 발생 시 처리 가능 여부: 계획 실패 시 이동 태스크의 두 번째 출구를 통해 오류를 처리할 수 있는지 여부에 대한 설명입니다. 현재까지 두 번째 출구가 있는 이동 태스크는 비전 이동 및 혼합 팔레타이징입니다. 비전 이동의 두 번째 출구는 비전 포즈 혹은 파킹 가능한 포즈가 없는 경우에 사용되며 혼합 팔레타이징의 두 번째 출구는 물체를 이미 피킹을 했지만 기존 더미에 배치하기가 적절한 포즈가 없는 경우에 사용됩니다.
계획 기록을 펴기¶
위 그림의 두 번째 계획 기록을 예로 들면 펴진 후의 구조에 대해 설명해 보겠습니다.
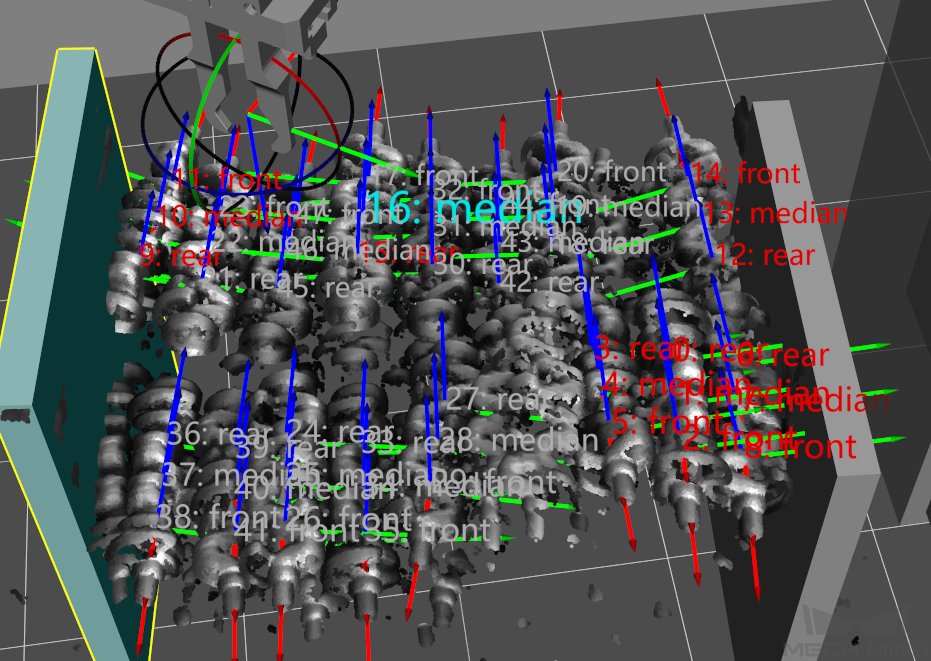
응용 시나리오 소개: 크랭크축 텐딩; 이미지를 한번 캡처하면 여러 개의 크랭크축을 인식할 수 있습니다. 한 크랭크축에 세 개의 피킹 포즈를 가지고 있고 Z축에는 대칭성이 없지만 X축(약한 축)에는 임의의 각도 대칭성을 가지고 있습니다. 또한 클램프는 180°혹은 360° 두 가지 가능한 대칭성을 가지고 있습니다.
실제 계획 결과¶
기획 결과 전개도¶
계획 기록의 구체적인 항목을 전개하면 각 피킹 포즈의 구체적인 계획 결과로 신속하게 포지셔닝을 할 수 있습니다.
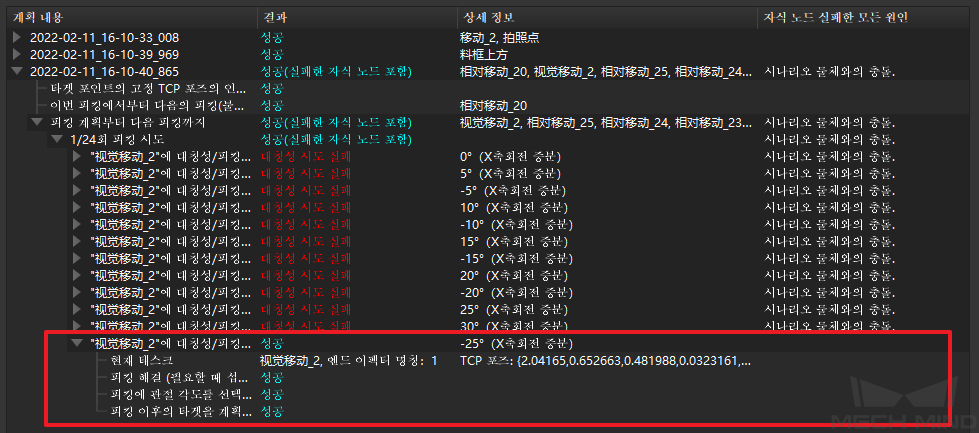
그림과 같이 해당 계획 과정에 나타나는 오류는 병행 계획의 오류이고 소프트웨어가 X축의 대칭성에 의해 총 12가지의 피킹 포즈를 시도해 봤습니다. 1-11 차례 모두 실패했지만 마지막 차례가 성공했기 때문에 전잔적으로 성공한 것으로 여기고 로봇이 정상적으로 피킹할 수 있습니다.
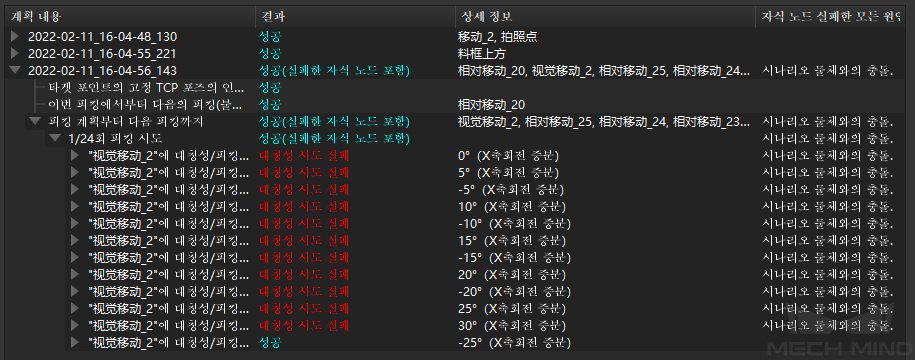
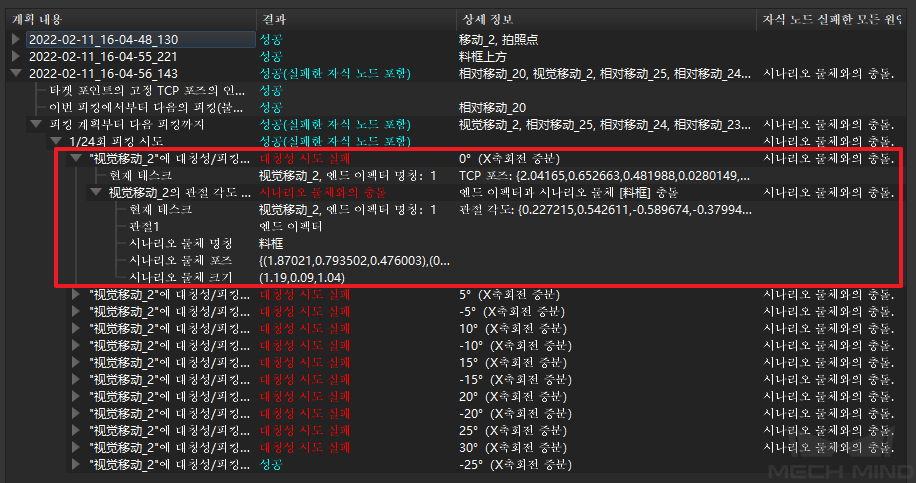
대칭성 시도 실패한 경우의 결과 전개도
설명을 보기: “원시 Vision-0” 이 Mech-Vision에서부터 보낸 초기 피킹 포즈의 인덱스를 의미합니다. 이 인덱스는 Mech-Viz가 계획 시 시도한 인덱스와 일치하지 않을 수 도 있습니다. 원인은: 크랭크축 피킹 시 반복적으로 같은 위치를 피킹하는 것을 피하기 위해 초기의 피킹 포즈의 우선 순위가 낮아지거나 삭제될 수 있기 때문일 수도 있으며 상자 혼합 디팔레타이징 할 때 Mech-Vision에서 상지의 피킹 포즈를 산출한 다음에 Mech-Viz가 자동으로 옵셋을 계산할 것이라서 한 상자가 여러 개의 피킹 포즈와 대응할 수 있기 때문일 수도 있습니다. 이러한 원인으로 Mech-Viz가 시도한 인덱스는 원시 비전 결과와 불일치하는 가증성도 있습니다. 이 인덱스는 “실제-0”로 표시되고 “총수-48”은 Mech-Viz가 실제로 시도할 수 있는 피킹 포즈의 총수를 의미합니다.
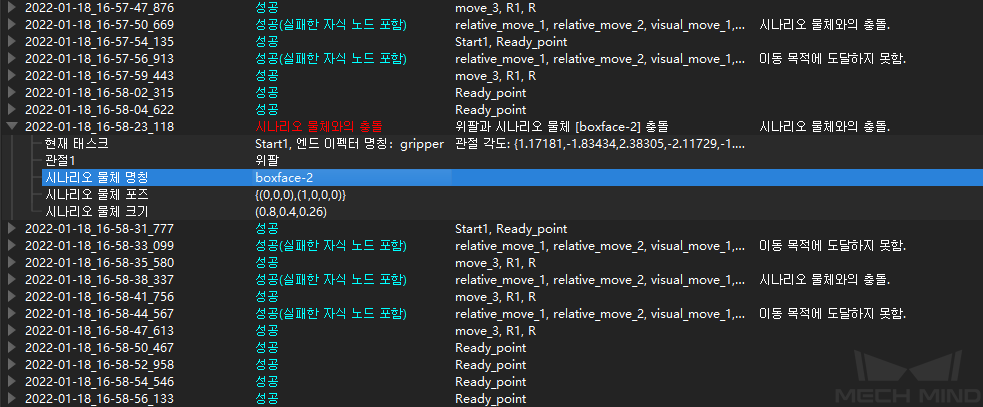
위 그림에 표시된 실패 원인은 사나리오에 있는 물체와 충돌했기 때문입니다.충돌이 발생한 관절 인덱스를 확인할 수 있습니다: 6축 로봇을 예로 들면 인덱스 0은 로봇의 베이스,1-6은 로봇의 1-6축, 7은 엔드 이펙터, 8은 로봇이 피킹한 물체의 뜻입니다. 이 그림은 클램프와 시나리오에 있는 boxface-2라는 물체와 충돌한다는 뜻입니다.
대칭성 시도 성공한 경우의 결과 전개도
계획 결과 유형:
1.성공
2.계획될 타겟 없음
3.최종 태스크는 다음 태스크에 의함
4.순환 종속
5.이동 목적에 도달하지 못함
6.궤적 도달하지 못함
7.관절 각도 선택 실패
8.휴리스틱하게 관절 각도 선택 실패
9.심각한 특이점
10.직선 운동 계산 결과 불일치
11.물체 포즈 시도 실패
12.무효한 피킹 포즈
13.대칭성 시도 실패
14.로봇 자체 충돌
15.시나리오 물체와의 충돌
16.포인트 클라우드 충돌 포인트수가 제한 초과
17.포인트 클라우드 충돌 면적 제한 초과
18.궤적 충돌
성공이 아니라면 모든 상태가 실패로 간주됩니다. 어떤 경우의 실패 원인은 심층적이라서 자세하게 알려면 트리 구조의 더 깊은 노드를 통해 확인해야 합니다.