3D视觉引导学习向导
学习向导 带你由浅入深,玩转3D视觉引导机器人抓取。 |
 系统构成概览
系统构成概览
机器人3D视觉引导解决方案是集成了梅卡曼德传感感知、视觉理解和路径规划等技术的完整解决方案,旨在解决机器人在复杂、未知或动态环境中面临的挑战。 该解决方案提供了丰富的应用场景,例如3D视觉引导工件上料、拆码垛、定位装配和货品拣选,广泛应用于汽车、物流、商超、重工等领域。更多信息,请参见机器人3D视觉引导解决方案介绍。 |
关于部署该解决方案所需的软件以及配套的版本,请参见3D视觉引导方案的推荐软件版本组合。
 快速入门
快速入门
为初学者或新用户提供快速入门教程。通过学习入门教程,你可以简单了解梅卡曼德3D视觉引导解决方案,并尝试搭建你的第一个3D视觉引导应用。
教程:视觉引导机器人抓取小型金属件 通过本教程,你可以学习如何搭建一个简单的3D视觉引导工件上料应用,实现3D视觉引导机器人循环抓放小型金属件。 |
|
教程:视觉引导机器人纸箱拆垛 通过本教程,你可以学习如何搭建一个简单的3D视觉引导拆垛应用,实现3D视觉引导机器人循环抓放单品类纸箱。 |
|

 实际应用部署
实际应用部署
为实际应用部署提供部署思路、操作指导以及经验分享。在了解机器人3D视觉引导解决方案后,你可以通过本部分学习实际3D视觉引导应用部署所需的知识与经验。
3D视觉引导应用部署的基本思路如下图所示。


视觉系统硬件搭建是将硬件设备(相机和工控机)集成到实际工作环境中,以支持视觉系统的正常运行。
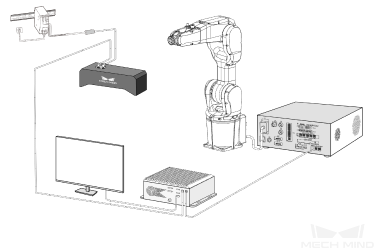
视觉系统硬件搭建的过程可能因相机安装方式的不同而存在差异。详细信息,请参考视觉系统硬件搭建。
视觉系统硬件搭建完成了视觉系统与机器人系统的硬件集成,机器人通信配置则是完成两者之间的通信集成,确保视觉系统与机器人侧能够准确和实时地交互数据。
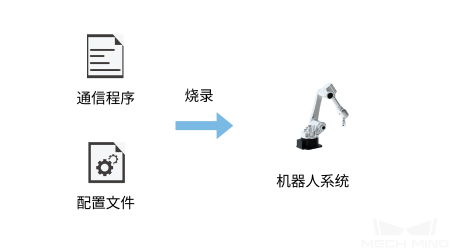
机器人通信配置通常需要将梅卡曼德提供的通信程序和配置文件导入到机器人系统中,并完成相应的通信配置。详细信息,请参考机器人通信配置。
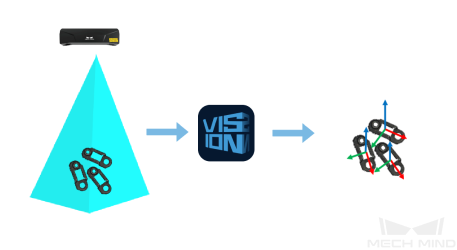
机器人对环境的感知需要通过“眼睛(相机)”来实现,手眼标定用于建立相机坐标系与机器人坐标系的对应关系。

针对不同的机器人类型、相机安装方式、机器人通信方式,梅卡曼德 Mech-Vision软件的标定工具提供了标准化的标定流程,帮助你轻松完成手眼标定。详细信息,请参考手眼标定。
3D视觉引导机器人抓取是3D视觉引导应用部署的最终目的。在该阶段,你需要搭建机器人抓取流程,让机器人在视觉结果的引导下进行精准抓取。

因使用的通信方式不同,最终搭建的流程的方式存在差异。详细信息,请参考抓取。
更多关于不同应用场景的实践指导,请参考“3D视觉引导典型案例实践”。