HYUNDAI标准接口通信配置¶
本节介绍如何配置HYUNDAI标准接口通信。
检查控制器及软件版本¶
机器人控制器柜:Hi5a-S系列或Hi5a-T10系列。
梅卡曼德软件系统版本:1.6.0或以上。
建立网络连接¶
硬件连接¶
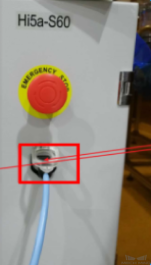
控制柜内部有三个网口,分别为CNETN1、CNETN2和CNETN3,分别对应示教器上的EN0地址、TP地址和EN2用户以太网地址。控制柜外部的以太网网口对应内部的CNETN3网口。
对于Hi5a-S系列的控制柜,将工控机网线连接到控制柜外部的以太网网口(如下图所示)。
对于Hi5a-T10系列的控制柜,将工控机网线连接到控制柜外部的以太网网口(如下图所示)。

设置 IP¶
在示教器上,依次点击 ,进入环境设置页面。


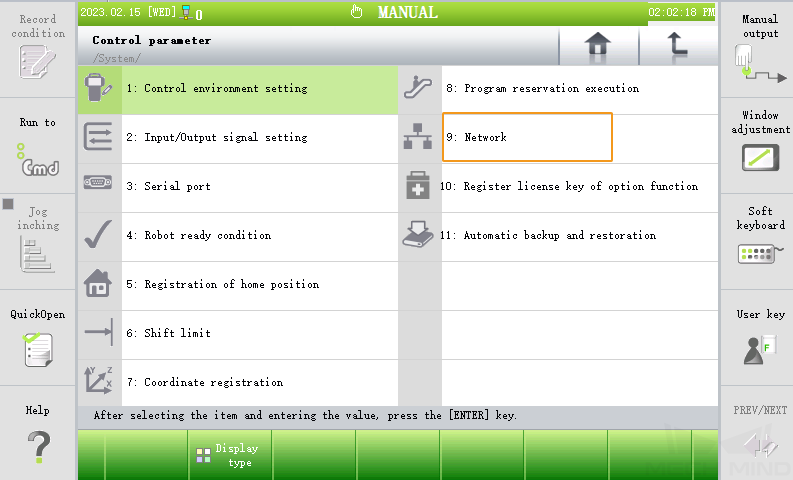
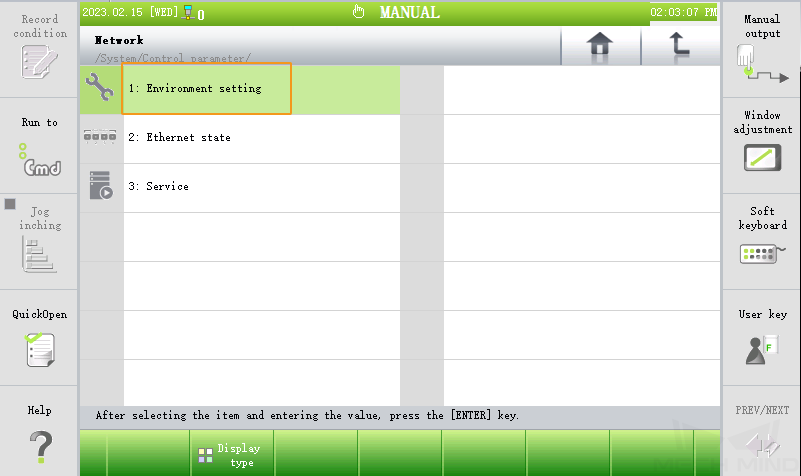
切换至 EN2 (Public) ,在 IP Address 中设置 IP 地址,在 Subnet Mask 中设置子网掩码。
注意
机器人 IP 地址需与工控机在同一网段。
机器人与工控机子网掩码相同,均为 255.255.255.0 。
修改 IP 地址后需重启机器人。

准备烧录文件¶
在工控机上,在梅卡曼德软件系统的安装目录下打开
Mech-Center/Robot_Interface/HYUNDAI文件夹。在 HYUNDAI 文件夹中,根据具体所用的机器人型号,修改每个.JOB 文件中的第一行,例如“Program File Format Version : 1.6 MechType: 739(HH4-01) TotalAxis: 6 AuxAxis: 0”。
将 U 盘插入工控机的 USB 端口,然后将修改后的 HYUNDAI 文件夹复制到 U 盘中,最后安全拔出 U 盘。
烧录文件至机器人中¶
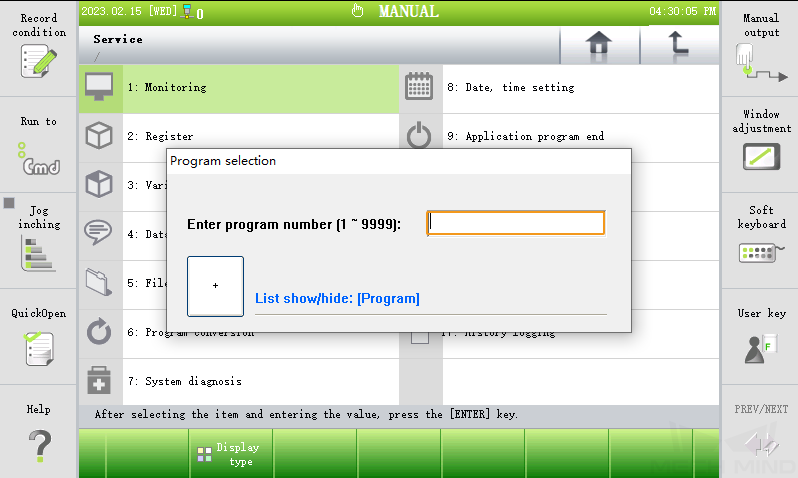
将 U 盘插入示教器。
依次点击 ,然后选择 HYUNDAI 文件夹下的所有 JOB 文件,点击底部栏 Copy,然后切换至 T/P 文件夹,最后点击底部栏 Paste,文件烧录至机器人中。


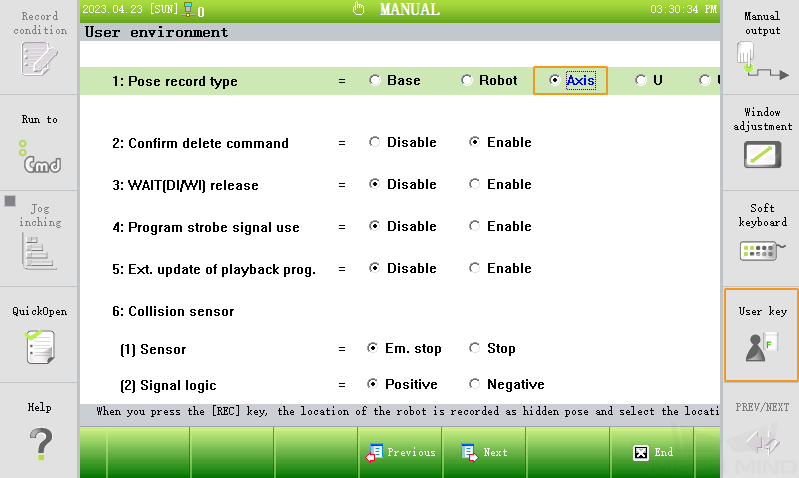
烧录后的操作¶
单击 进入用户环境页面。

单击 User key ,输入 314 (通用权限密码),可获得授权。
在 Pose record type 处,按住示教器上的 Shift 按钮并按左/右箭头按钮,选择 Axis 。
设置 Mech-Vision 中“机器人与通信配置”¶
单击 Mech-Vision 工具栏中 机器人与接口配置 。
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体机器人型号,单击 下一步 。
在 通信方式 下,接口类型选择 标准接口 ,协议选择 UDP Server ,协议格式选择 ASCII,最后单击 应用 。
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。