映射到多抓取点¶
使用场景¶
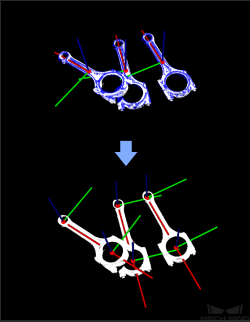
如果抓取点与几何中心点不一致,或抓取点不止一个时,需要此步骤。请通过以下固定用法为场景中的物体添加多个可发送给机器人控制软件的抓取点。
此步骤输出的“抓取点”需要连接 位姿变换 的“参考位姿”端口。
此步骤输出的“位姿偏移”需要连接 位姿变换 的“原始位姿”端口。
输入与输出¶
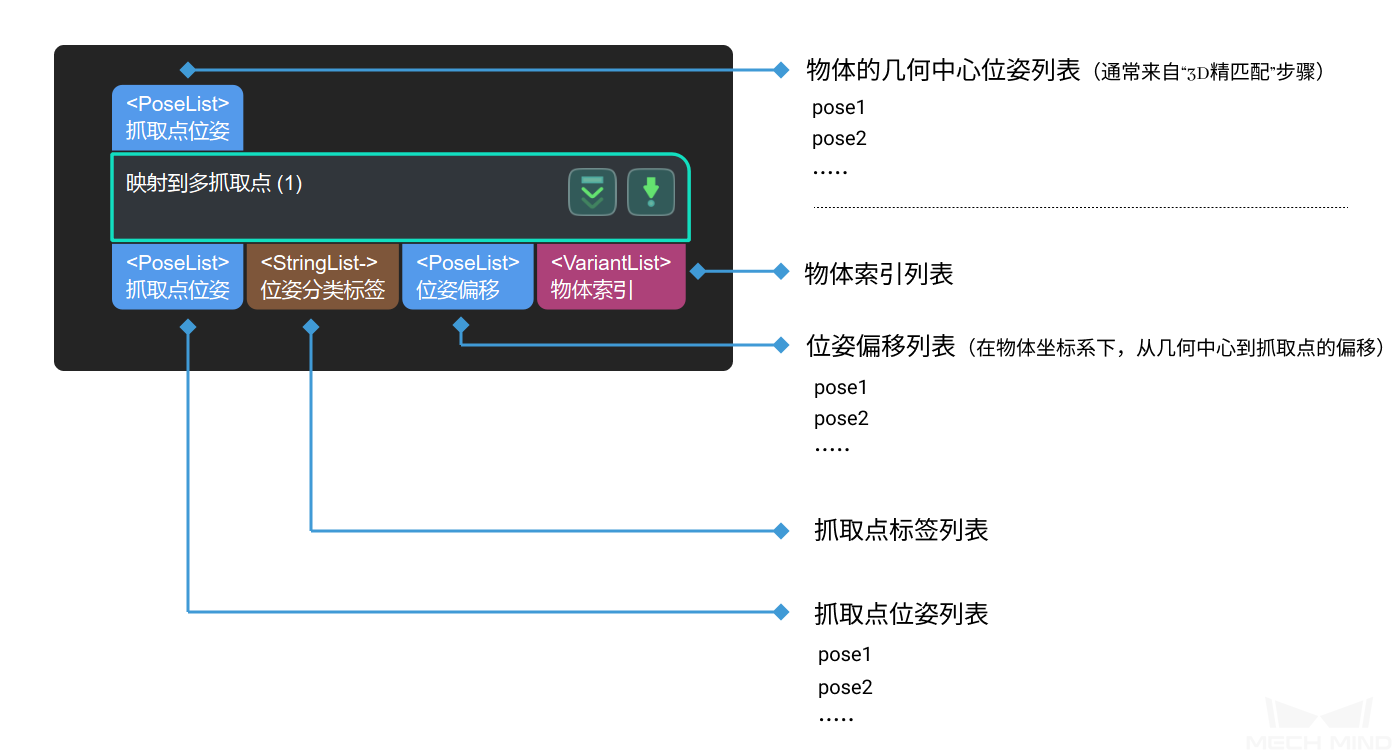
参数说明¶
位姿文件路径
- 几何中心点文件
- 模板上物体几何中心点的位姿调节说明:存储几何中心点文件的绝对路径或相对路径。
- 放置点位姿文件
- 物体放置点的位姿调节说明:存储放置点文件的绝对路径或相对路径。
- 抓取点位姿文件
- 模板上物体抓取点的位姿调节说明:存储抓取点文件的绝对路径或相对路径。
加载标签(可选)
- 位姿标签文件
- 与抓取点文件对应的标签文件调节说明:存储标签文件的绝对路径或相对路径。