快速了解 Adapter¶
Adapter 介绍¶
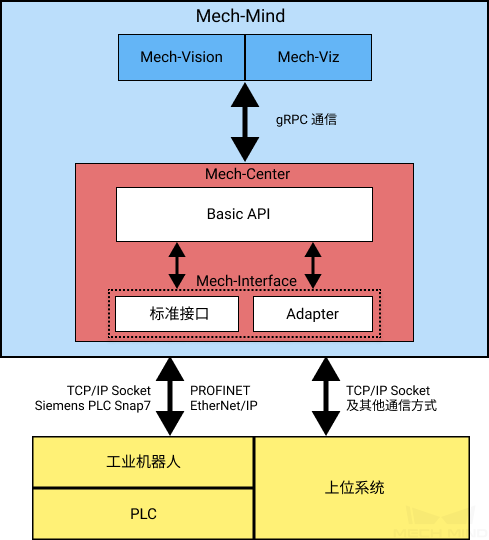
Adapter 是 Mech-Center 软件下的通信组件,通过 Basic API 接口与 Mech-Vision 和 Mech-Viz 进行 gRPC 通信,与外部设备之间通过常见的各种工业通信方式进行通信,例如 TCP/IP Socket、HTTP 以及 PLC 数据块传输协议(例如三菱 PLC MC 协议)。
关于 Adapter 的应用场景,请参考 “应用说明” 章节的内容。
Adapter 功能¶
Adapter 可以提供如下功能:
对内实现对 Mech-Vision 和 Mech-Viz 软件的控制
类别 |
功能 |
Mech-Vision 相关 |
运行并获取 Mech-Vision 视觉结果 |
设置 Mech-Vision 步骤参数 |
|
读取 Mech-Vision 步骤参数 |
|
切换 Mech-Vision 参数配方 |
|
Mech-Viz 相关 |
启动 Mech-Viz |
停止 Mech-Viz |
|
设置 Mech-Viz 步骤参数 |
|
读取 Mech-Viz 步骤参数 |
|
设置夹具编号 |
|
设置机器人运行速度 |
|
设置点云碰撞参数 |
|
获取 Mech-Viz 运行状态返回 |
|
其他 |
具体功能请参见“Adapter 编程指南” |
对外实现比如用户界面、数据库、文件读写、与Web系统通信等非视觉功能
对外功能,需要通过 Python 编程开发实现。
Adapter 的开发¶
针对 TCP/IP Socket 通信方式,Mech-Center 提供 Adapter 生成器 功能,帮助初次接触 Adapter 的用户快速生成 Adapter 程序并搭建 Adapter 工程。详细信息,请参考 “Adapter 生成器手册” 章节的内容。
您可以在生成的 Adapter 基础上进行程序的二次开发。
当然,您也可以从零开始编写完整的 Adapter 程序。详细信息,请参考 “Adapter 编程指南” 和 “Adapter 编程样例” 章节的内容。
Adapter 工程的部署¶
完成 Adapter 程序的编写后,按照如下步骤部署 Adapter 工程:
打开 Mech-Center 软件,点击工具栏中的 部署设置 按钮。
在 部署设置 窗口,选择 Mech-Interface,勾选 启用 Mech-Interface 复选框,并将 接口服务类型 设置为 Adapter,如下图所示。
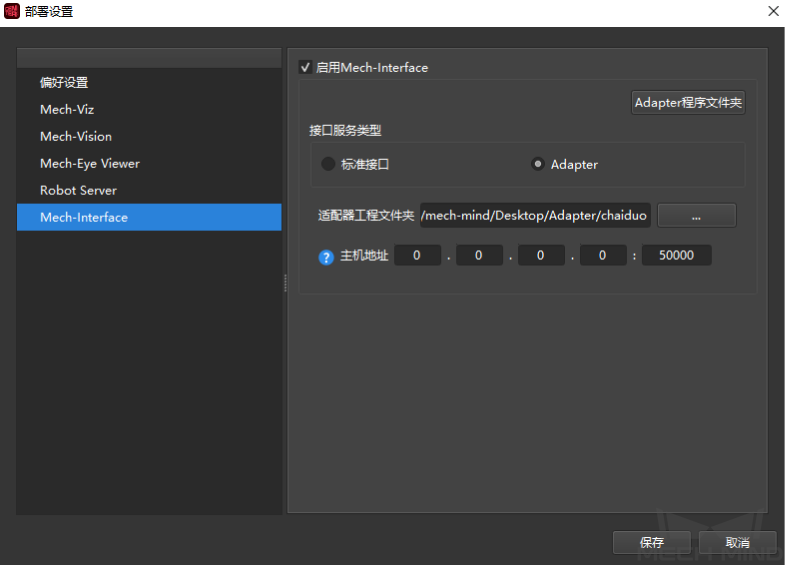
将 适配器工程文件夹 设置为保存 Adapter 程序的目录。
根据现场实际,设置 主机地址。端口与对端保持一致。
如果对端作为通信的服务端, 主机地址 应设为对端的 IP 地址。
如果对端作为通信的客户端, 主机地址 应设为“0.0.0.0”。
点击 保存 按钮,然后重启 Mech-Center 软件。
点击工具栏中的 启动接口服务 按钮启用 Adapter 服务。
当 启动接口服务 按钮变为 停止接口服务 并且服务状态栏中显示启用的 Adapter 程序时,Adapter 服务启用成功,如下图所示。

快速了解 Adapter 后,您可以参照 “Adapter 生成器手册” 章节快速生成第一个 Adapter 程序。