Configure Adapter Communication¶
This section introduces how to configure the Adapter communication. Before configuration, please confirm that you have already selected the robot and entered the Communication Option interface.
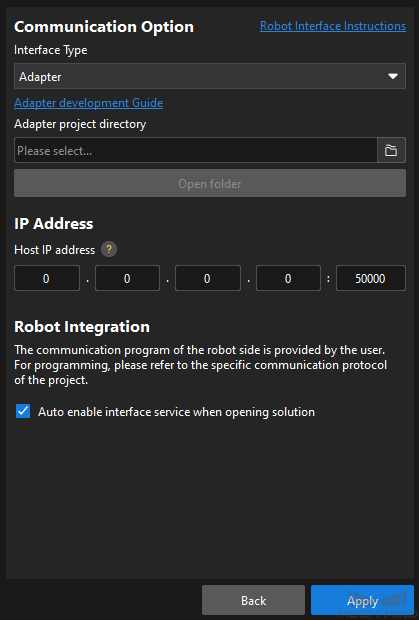
On the Communication Option interface, set Interface Type to Adapter.
Click
 and select the folder of the Adapter project.
and select the folder of the Adapter project.Attention
You need to write the Adapter program first. For details, refer to Adapter Programming Guide .
For the Host IP address, enter the IP address and port number.
Note
The host IP address and the robot IP address must be on the same subnet.
The port number should be set to 50000 or larger.
(Optional) Select Auto enable interface service when opening solution. When the solution is opened, you do not need to start the interface service manually.
Click the Apply button.
Next, you need to write the robot-side communication program by referring to Standard Interface Development Manual and load it to the robot.