Extract Planar Point Clouds¶
Function¶
This Procedure can be used to remove points that deviate from the plane of the point cloud and obtain a relatively flat planar point cloud.
Usage Scenario¶
This Procedure is usually used in measurement scenarios for large workpieces. Usually, the Select Point Cloud from Depth Map Procedure is used before this Procedure to obtain the point cloud, and the Calc Hole Center Poses and Diameters and Calc Oblong Hole Center Poses and Axis Lengths Procedures follow this Procedure to measure the circular holes and oblong holes respectively.
Input and Output¶
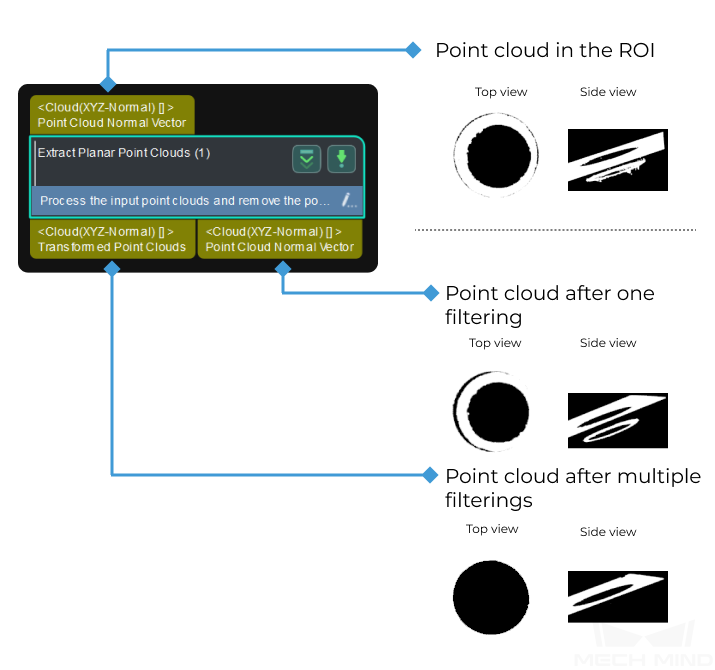
Parameter Tuning¶
Point Filter/ Point Filter (Coarse Filtering 2)/ Point Filter (Fine Filtering 2)¶
- Mean K:
- Parameter description: This parameter is used to remove points that are near to the planar point cloud. Points that are nearest to the planar point cloud will be removed first. The larger the value, the more points will be removed.Default value: 30
- Standard Deviation Multiplier:
- Parameter description: This parameter is used to calculate the threshold of distance. The smaller the value, the more points will be removed.Default value: 2.0
Point Filter (Coarse Filtering)/ Point Filter (Fine Filtering)¶
- Max Angle:
- Parameter description: This parameter specifies the maximum angle (°) between the Z-axis of the reference point and the normal of the measurement point. Points with the angle between the reference direction and the point normal greater than the maximum angle will be discarded. The larger the value, the more points will be kept.Default value: 3°