Mech-Viz 1.7.0 更新说明¶
本文介绍 Mech-Viz 1.7.0 版本的新增功能、功能优化以及问题修复。
新增功能¶
新增“欢迎界面”¶
启动软件或关闭工程后,软件会进入“欢迎界面”。在“欢迎界面”可新建工程或打开最近使用的工程。
新增“工程资源”¶
Mech-Viz 1.7.0 移除了软件内原有的“场景物体”和“工具与工件”功能面板,并将工程所需资源重新梳理后汇总到新增的工程资源管理工具 工程资源 。
“工程资源”中汇总的资源包括:工程、机器人、坐标系、末端工具、工件、地板、场景物体和模型库。
工程:显示工程名称、工程修改状态、工程是否自动加载。
机器人:显示当前工程使用的机器人型号。
坐标系:统一汇总软件仿真空间内所有的坐标系。
末端工具:创建、删除末端工具,并对已有末端工具进行管理。
工件:创建、删除工件配置,并对已有工件进行管理。
地板:调整地板高度。
场景物体:创建、删除场景物体,并对已有场景物体进行管理。
模型库:统一管理工程内的所有模型,工程内的所有模型均需先导入模型库,再由其他功能调用。
新增“设置为当前工具”¶
软件新引入了“当前工具”概念。被设置为“当前工具”的末端工具会在下一轮仿真/运行时作为规划起始工具。
非仿真/非运行状态下,在工程资源中右键末端工具名称后,单击“设置为当前工具”可修改“当前工具”。
仿真/运行过程中,通过“切换工具”步骤可以切换“当前工具”。
“预设垛型”新增自动生成垛型功能¶
“预设垛型”步骤可根据托盘尺寸、箱子尺寸、间隙大小、垛高限制自动计算并生成码垛数量最多、奇偶层形式合理、层数最多的垛型。
其他¶
文件菜单栏中新增“新建工程”选项。
新增珞石 SR3、SR4 机器人模型,并开发了对应的特殊机器人构型。
用户可以通过快捷键 Ctrl + G 一次性将已框选的多个步骤打包进一个“步骤组合”中,也可以通过快捷键 Ctrl + Shift + G 快速拆分“步骤组合”。
“消息分支”增加“超时”出口,用户可以设置超时时间,等待超时后工程会自动从超时出口继续进行。
“混合码垛”离线模式下支持保存和导入预先计算好的垛型。
“混合码垛”新增支持指定箱子码垛朝向的功能。
“预设垛型”新增支持“扁回字”垛型。
“预设垛型”新增工件朝向设置功能。
功能优化¶
扩充机器人模型库¶
在线机器人模型库由 214 款机器人增加至 600+ 款,完成了对 ABB、电装、发那科、川崎、库卡、三菱、那智、优傲、史陶比尔、安川等几乎全部机器人的收录。 同时 ABB、发那科、川崎、库卡、那智、优傲、安川品牌的机器人已经在制作过程中进行了参数校准,可以确保机器人参数正确可靠。
不再支持 STL 格式的末端工具碰撞模型¶
为了更好的检查末端工具与点云的碰撞,Mech-Viz 1.7.0 版本不再支持 STL 格式的末端工具碰撞模型。软件支持的模型格式请查阅 工程资源模型说明 。
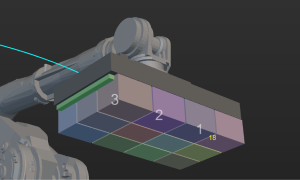
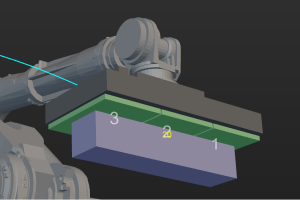
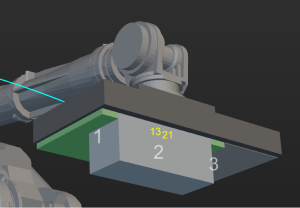
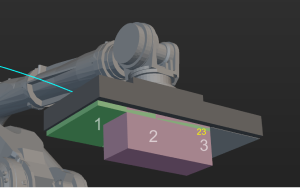
优化“视觉移动”拆垛算法¶
Mech-Viz 1.7.0 对 视觉移动 的拆垛算法进行了优化重构,支持以下功能。
单分区吸盘 |
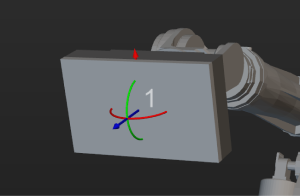
|
多分区吸盘 |
|
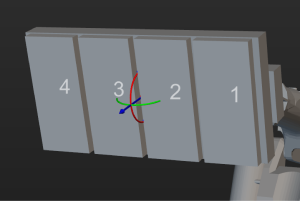
抓一个 |
|
抓一排 |
|
抓多排 |
|
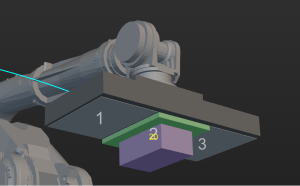
吸盘中心对应箱子中心 |
|
吸盘边中点对应箱子边中点 |
|
吸盘角对应箱子角 |
|
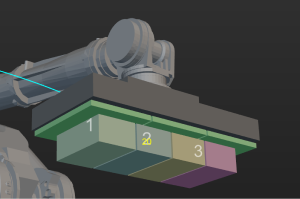
吸盘长边平行于纸箱组长边 |
|
吸盘长边垂直于纸箱组长边 |
|
此外,软件不再限制工具中心点坐标系 X 轴平行于吸盘长边,不再限制工件抓取点坐标系 X 轴必须平行于箱子长边。 以上全部功能之间没有耦合性,可通过修改参数配置多种抓取策略。
优化模型编辑器¶
模型编辑器新增“设置坐标系”功能,该功能可设置参考模型的坐标系原点及其坐标系各轴的朝向,以保证导出的 OBJ 模型可以快捷、准确的安装在机器人法兰末端。
模型编辑器的工程合并为 .m3d 文件,不再需要创建文件夹进行保存。
模型编辑器生成的 OBJ 格式模型可以被 Mech-Viz 1.6.0 之前的软件兼容。
优化欧拉角表示形式¶
各品牌机器人在示教器上用于表示欧拉角类型的符号各不相同,例如 ABB 使用 EX、EY、EZ ;KUKA 使用A、B、C ;川崎使用 O、A、T。 Mech-Viz 1.7.0 版本内置了部分机器人品牌及其欧拉角类型对应关系,并记录了这些品牌表示欧拉角所使用的特定符号。 用户选择机器人后,软件会自动将工程内的欧拉角类型切换至与机器人对应的形式,并以品牌所使用的符号在界面上显示。
优化末端工具配置¶
Mech-Viz 1.7.0 版本对末端工具配置界面进行了功能整合、优化。新的末端工具配置界面包括工具类型配置、工具控制逻辑配置入口,并优化了对称性配置参数。
优化工件配置¶
Mech-Viz 1.7.0 版本新的工件配置界面整合了以往散落在软件各处的工件相关配置,新的工件配置界面包括工件对称性配置、抓取裕度配置,以及选解策略配置。
优化场景物体配置¶
Mech-Viz 1.7.0 版本将新建场景物体界面与场景物体配置界面合并,同时优化了方筐的视觉位姿有限范围配置相关参数。

其他¶
菜单栏
移除工具菜单栏中的“不打印发送给机器人的报文”选项,更改为一直打印发送给机器人的报文。
移除工具菜单栏中的“生成调试文件(.dmp)”选项,不再支持此功能。
中的全局默认长度和角度单位从“使用各步骤内置单位”修改为 mm 和 ° 。
工程资源
调整工具栏中的“自动加载工程”选项至 。
吸盘配置与末端工具配置合并,不再保留单独的吸盘配置文件。
末端工具配置、工件配置、场景物体配置界面开启时可以同时调整主界面仿真空间视角,以及缩放。
步骤
移动类步骤快速设定、变换位姿、校准位姿、编辑位姿按钮重排布。
“设置多个DO”端口号上限修改到 30000。
“检查视觉结果”的“未完成”出口改名为“超时”。
“视觉移动”箱子多抓功能日志优化,增加箱子组合、箱子偏置详细规划过程日志。
“更新场景物体”通过视觉更新时新增“失败”出口。
执行“视觉移动”进行箱子多抓时,组合后的箱子不会再变成一个大箱子,而是保持为多个独立的小箱子。
移除“相对移动”步骤中的相对于“选择”选项。
移除“设置RobotIQ”和“调用机器人函数”步骤。
移除“视觉移动”中的“保存实际抓取的位姿”参数及其相关功能。
机器人功能面板
增加机器人关节角滑条动态限位数值显示。
优化针对安川 PL80、MPL80II、MPL100II 特殊定义形式的机器人关节角显示,确保与机器人一致。
切换机器人后将不再清空末端工具列表。
工程所需机器人丢失时,支持用户手动从机器人库中重新选择其他机器人。
碰撞检测
不论是否开启点云碰撞,“视觉移动”都可以移除被抓工件的点云。
不论是否开启点云碰撞,重置“视觉识别”都可以重置点云。
软件通信
其他功能面板中新增“跳过相邻的路径点”参数,用户可以配置软件是否发送第二个路径点。
移除“其他”功能面板中的“发送工具位姿”选项,固定为一直发送。
问题修复¶
Mech-Viz 1.7.0 修复了以下问题:
打开旧工程失败时,仍加载了部分工作流程图。
工程锁定状态下没有密码也可以注册新用户。
在部分情况下关闭工程时,没有提示用户有未保存修改。
仿真/运行状态下可以通过拖动坐标轴修改场景物体位置。
仿真/运行状态下拖动机器人 TCP 坐标轴可以拖动虚拟机器人。
机器人安装包文件中存在大写字符会导致安装失败。
新建末端工具时,三维仿真空间内的 TCP 坐标系不会跟随配置变化。
工作流程图自动排布时,步骤可能重叠在一起。
工作流程图搜索功能的筛选对象,会随着搜索功能开启/关闭变化。
视觉服务未被“视觉识别”触发时,“视觉移动”报错提示信息不正确。
“视觉移动”复用视觉结果且规划失败时,报错信息不清晰。
“视觉移动”抓取数量到达设定值时,提示信息不正确。
“更新已持有工件”从视觉更新时,物体尺寸可能从参数侧继承。
模型类型为外部模型的工件,被抓取时工件模型没有被抓走。