FANUC CRX Interface Commands¶
Mech-System SocketInit¶
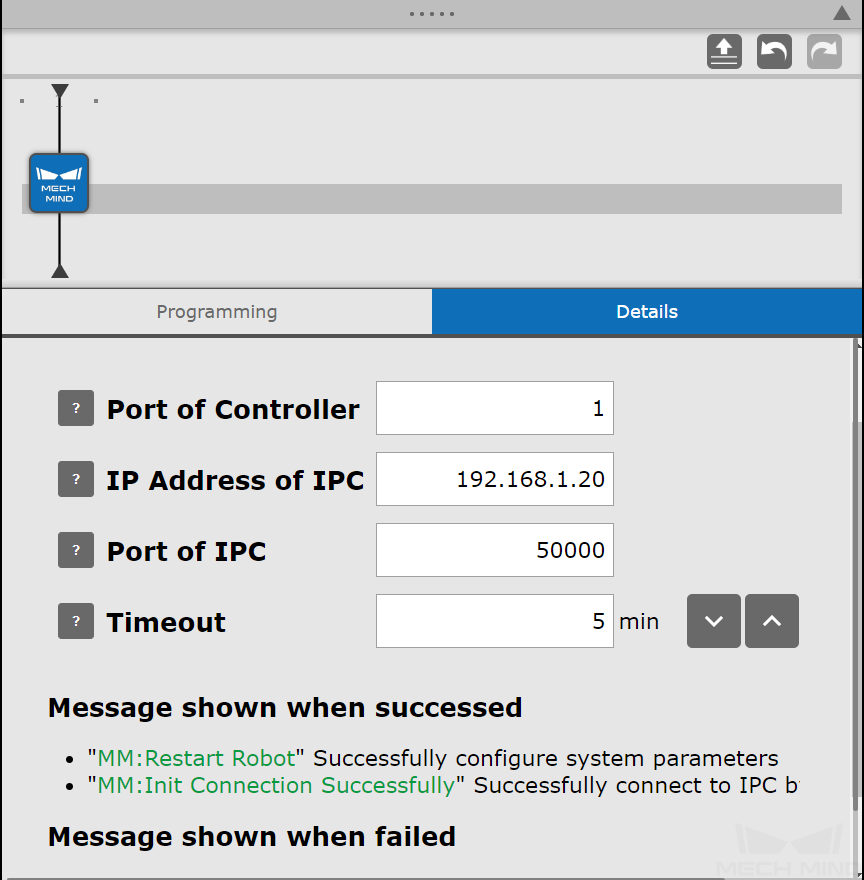
This command is used to set the IP address of IPC, port number of IPC, and wait time for TCP/IP communication.
Parameters
Parameter |
Description |
Port of Controller |
ID of the Ethernet port of the controller used to communicate with the IPC |
IP Address of IPC |
The IP address of the IPC |
Port of IPC |
The port number of the IPC configured in Mech-Center |
Timeout |
Wait time in minutes before stopping connection attempt |
Attention
You only need to configure the communication settings once if the network environment and IP addresses on both sides remain unchanged.
Mech-Eye Calibration¶
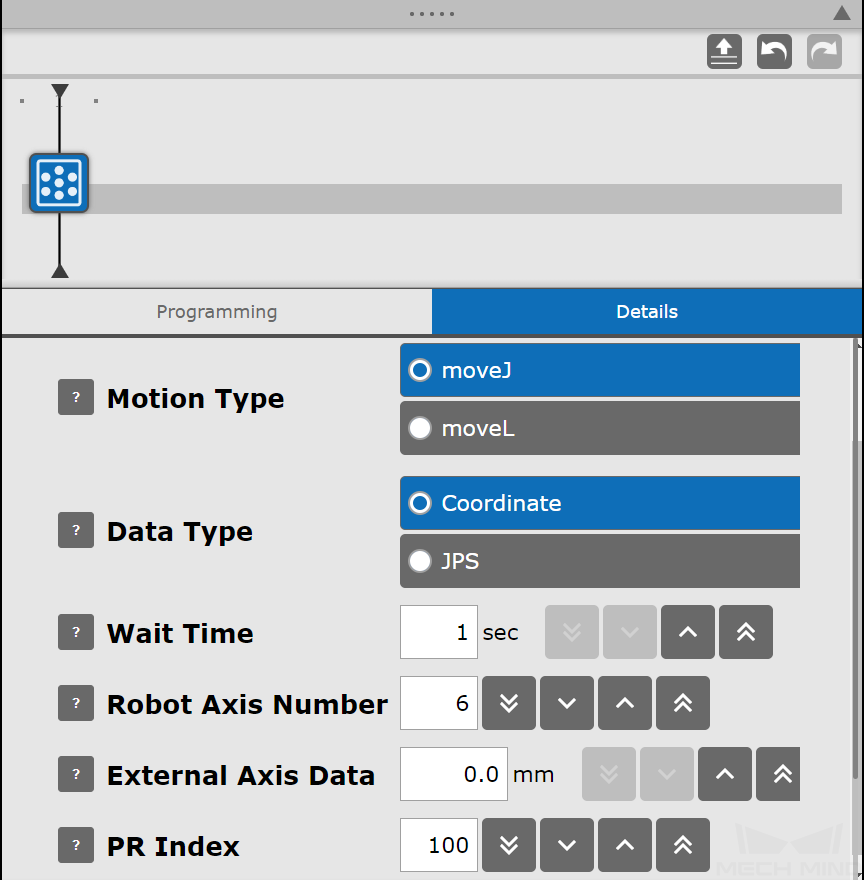
This command is used for camera extrinsic parameter calibration. It automates the calibration process in conjunction with the Camera Calibration function in Mech-Vision.
Parameters
Parameter |
Description |
Motion Type |
The robot’s motion type (MoveJ or MoveL) during the automatic calibration process |
Data Type |
The pose type (Coordinate or JPS) sent by the robot |
Wait Time |
The time the robot waits to avoid shaking after it moves to the calibration point; the recommended value is 1~5 (s) |
Robot Axis Number |
The axis number of the robot; the default value is 6; set the value to 7 if there is an external 7th axis |
External Axis Data |
Position data of the external 7th axis during calibration (Optional; input 0 when there is no external axis) |
PR Index |
The index of the Position Register where the the start point of the calibration is stored |
Mech-Vision Trigger¶
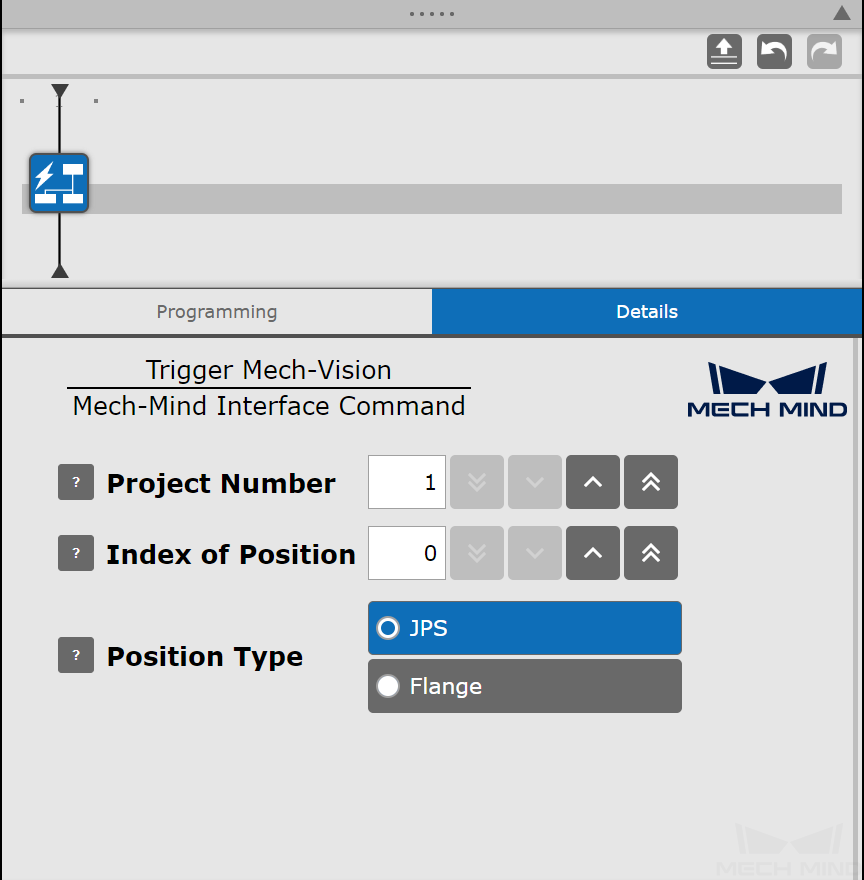
This command triggers the Mech-Vision project to run.
Parameters
Parameter |
Description |
Project Number |
The Project ID of the Mech-Vision project to be triggered |
Please go to to check and adjust the number |
|
Index of Position |
Number of poses you expect Mech-Vision to send 0: Sends all vision points, up to 20 vision points Integers between 1 to 20: If the total number of vision points Mech-Vision gets is larger than the expected value, only the expected number of vision points will be sent |
Position Type |
JPS: Sends the current joint positions of the robot to Mech-Vision Flange: Sends the current flange pose of the robot to Mech-Vision |
Mech-Vision GetData¶
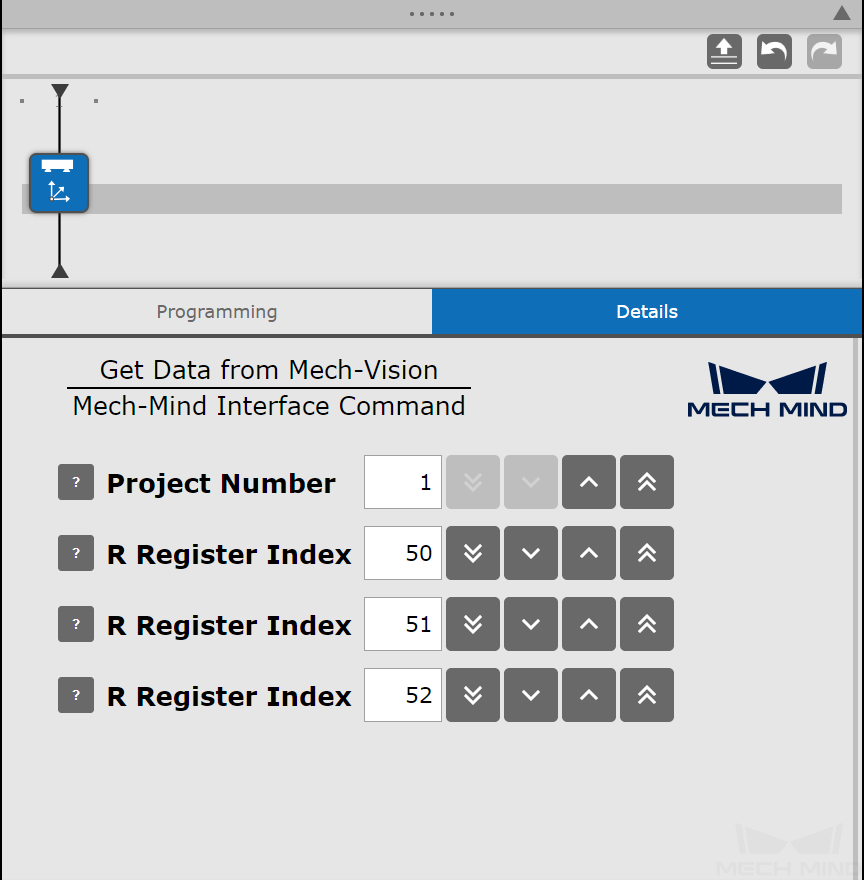
This command is used to obtain the vision result from the corresponding Mech-Vision project. It should be used after Mech-Vision Trigger.
Parameters
Parameter |
Description |
Project Number |
The Project ID of the Mech-Vision project |
Please go to to check and adjust the number |
|
R Register Index 1 |
Data Register, indicating whether all vision points have been sent, 0 or 1 |
1: All vision points have been sent 0: NOT all vision points have been sent, and you can use Mech-Vision GetData again to receive the rest result |
|
R Register Index 2 |
Data Register for storing the number of vision points |
R Register Index 3 |
Data Register for storing status code |
Mech-Vision SwitchConfig¶
This command is used to switch the parameter recipe used in the Mech-Vision project. If you need to switch the parameter recipe for the the Mech-Vision project, configure and save the parameter recipe in Mech-Vision in advance, and connect this command before Mech-Vision Trigger.
Parameters
Parameter |
Description |
Project Number |
The Project ID of the Mech-Vision project |
Please go to to check and adjust the number |
|
Recipe Index |
The number of a parameter recipe in the Mech-Vision project |
Mech-Vision SetBoxSize¶
This command is used to input object dimensions to the Read Object Dimensions Step in the Mech-Vision project.
Parameters
Parameter |
Description |
Project Number |
The Project ID of the Mech-Vision project |
Please go to to check and adjust the number |
|
Length |
Length of object in mm |
Width |
Width of object in mm |
Height |
Height of object in mm |
Mech-Viz Trigger¶
This command triggers the Mech-Viz project to run.
Parameters
Parameter |
Description |
Position Type |
JPS: Sends the current joint positions of the robot to Mech-Viz to synchronize the robot motion Empty: Not send the current pose of the robot |
Mech-Viz GetData¶
This command obtains the planned path from Mech-Viz. It should be used after Mech-Viz Trigger.
Parameters
Parameter |
Description |
Return Value Type |
Whether Mech-Viz should send waypoints as joint positions or TCPs |
1: Mech-Viz sends joint positions 2: Mech-Viz sends TCPs |
|
R Register Index 1 |
Data Register, indicating whether all waypoints have been sent |
0: NOT all waypoints have been sent, and you can use Mech-Viz GetData again to receive the rest waypoints 1: All waypoints have been sent |
|
R Register Index 2 |
Data Register for storing the number of received waypoints |
R Register Index 3 |
Data Register for storing the picking waypoint in the path |
R Register Index 4 |
Data Register for storing status code |
Mech-Viz SetBranch¶
This command is used to select the branch along which the Mech-Viz project should proceed.
Parameters
Parameter |
Description |
Branch Name |
Name of the branch_by_msg Task |
Branch Output |
The number of the exit port to take, which ranges from 1 to 99 |
Mech-Viz SetIndex¶
This command sets the value for the Current Index parameter of a Mech-Viz Task. Tasks that have this parameter include move_list, move_grid, custom_pallet_pattern, and smart_pallet_pattern.
Parameters
Parameter |
Description |
Move Skill Name |
Task ID of the Task with the index parameter |
Index |
The index parameter of the specified Task will be set to this value, and the parameter’s value should be the current index value in Mech-Viz plus 1 |
Mech-System GetPose¶
This command stores a vision point returned by Mech-Vision or a waypoint (such as a TCP) in the path returned by Mech-Viz in the specified Position Register. If you want to get multiple vision points or waypoints, you can use this command for several times and modify their Position Index respectively.
Parameters
Parameter |
Description |
Position Index |
Specify the index of the pose to be stored |
PR Index |
Position Register for storing the specified pose |
R Register Index 1 |
Data Register for storing the label corresponding to the specified pose |
R Register Index 2 |
Data Register for storing the speed corresponding to the specified pose; the value remains to be 0 |
Mech-System GetPoseJPS¶
This command stores a set of joint positions returned by Mech-Viz in the specified Position Registers. If you want to get multiple sets of joint positions of the waypoint, you can use this command for several times and modify their Position Index respectively.
Parameters
Parameter |
Description |
Position Index |
Specify the index of the set of joint positions to be stored |
PR Index |
Position Register for storing the specified set of joint positions |
R Register Index 1 |
Data Register for storing the label corresponding to the specified set of joint positions |
R Register Index 2 |
Data Register for storing the speed corresponding to the specified set of joint positions |