TCP/IP¶
Mech-Mind Software Suite can communicate with the following robots through TCP/IP:
ABB
YASKAWA
FANUC
KUKA
Kawasaki
For setup instructions and other information specific to each robot, please refer to Robot Integrations - Standard Interface.
The commands are as follows:
Command 101: Start Mech-Vision Project¶
This command starts the running of the Mech-Vision project, which executes image capturing and performs vision recognition.
If the project works in the eye-in-hand mode, the robot pose for image capturing needs to be transmitted by this command into the project.
This command is for scenarios using only Mech-Vision.
Command Sent¶
101, project number, expected number of vision points, robot pose type, robot pose
Project number
The integer ID number of the Mech-Vision project in Mech-Center, i.e., the number shown on the left of the project path in in Mech-Center. The number can be adjusted by dragging the projects.
Expected number of vision points
The number of vision points (i.e., vision poses and their corresponding point clouds, labels, indices, etc.) to expect Mech-Vision to output.
0: Get all the vision points from the Mech-Vision project’s recognition results.
integers > 0: Get the specified number of vision points.
If the total number of vision points is smaller than the parameter value, all the available vision points will be returned.
If the total number of vision points is greater than or equal to the parameter value, vision points in the quantity of the parameter value will be returned.
Note
The command to obtain the vision points is command 102. In TCP/IP, due to the limit that a maximum of 20 vision points can be obtained by executing command 102 at a time, after executing command 102 for the first time, one of the parameters returned will indicate whether all the vision points requested have been returned; if not, please repeat executing command 102.
Robot pose type
This parameter indicates the type of the image-capturing pose of the real robot to input to Mech-Vision.
0: No robot pose needs to be transmitted by this command. If the project works in the eye-to-hand mode, then image capturing has nothing to do with the robot’s pose, so no robot image-capturing pose is needed by Mech-Vision.
1: The robot pose transmitted by this command is JPs.
2: The robot pose transmitted by this command is a flange pose.
Robot pose
This parameter is the robot pose needed when the project works in the eye-in-hand mode.
The robot pose is either JPs or flange pose, according to the setting of the parameter robot pose type.
Data Returned¶
101, status code
Status code
If there is no error, status code 1102 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 101 is executed without error.
TCP send string = 101, 1, 10, 1, 0, -20.63239, -107.81205, 0, -92.81818, 0.00307
TCP received string = 101, 1102
Error: project ID number does not exist.
TCP send string = 101, 2, 10, 1, 0, -20.63239, -107.81205, 0, -92.81818, 0.00307
TCP received string = 101, 1011, 1
Command 102: Get Vision Target(s)¶
This command gets the vision targets, i.e., robot TCPs to reach the object poses contained in the vision points, after executing command 101.
Mech-Center automatically transforms the object poses in the vision points to their corresponding robot TCPs. The process is as follows:
Rotate the poses around their Y axes by 180 degrees.
Determine whether the definition of the reference frame used by the robot model involves robot base height, and add a vertical offset accordingly.
Note
In TCP/IP, by default, command 102 can only fetch at most 20 targets at a time. Therefore, command 102 may need to be repeatedly executed until all the targets required are obtained.
Command Sent¶
102, project number
Project number
The integer ID number of the Mech-Vision project in Mech-Center, i.e., the number shown on the left of the project path in in Mech-Center. The number can be adjusted by dragging the projects.
Data Returned¶
102, status code, transmission completion status, number of targets, reserved field, target, target, ...
Note
The targets (up to 20 targets by default) are located at the tail of the data returned.
Status code
If there is no error, status code 1100 will be returned. Otherwise, the corresponding error code will be returned.
After executing this command, if the results from Mech-Vision have not been returned, Mech-Center will wait before sending the results to the robot. The default wait time is 10 seconds. If a timeout occurs, the timeout error status code will be returned.
Transmission completion status
This parameter indicates whether all the targets requested have been obtained.
0: Not all the targets requested have been obtained. Please repeat executing command 102 until this parameter turns 1.
1: All the targets requested have been obtained.Note
If not all the targets requested have been obtained and command 101 is executed at this time, the rest of the targets that are not obtained will be cleared.
Number of targets
The number of targets obtained by executing this command this time.
Reserved field
This field is not used.
The value defaults to 0.
Target
pose, label, velocity
Pose: For this command, the robot pose is in the form of TCP, not JPs. A TCP includes the Cartesian coordinates (XYZ) and Euler angles (ABC).
Label: The integer label assigned to the pose. If in the Mech-Vision project, the labels are strings, they need to be mapped to integers before outputting from the Mech-Vision project using Step Label Mapping. If there are no labels in the Mech-Vision project, the label defaults to 0.
Velocity: The parameter defaults to 0 for command 102 because Mech-Vision does not plan robot target velocity.
Test Samples¶
Test samples of normal execution and execution error
Command 102 is executed without error.
TCP send string = 102, 1
TCP received string = 102, 1100, 1, 1, 0, 95.7806085592122, 644.5677779910724, 401.1013614123109, 91.12068316085427, -171.13014981284968, 180.0, 0, 0
Error: no vision result.
TCP send string = 102, 1
TCP received string = 102, 1002, 1
Test Sample of requesting targets
The test sample below is obtaining 22 targets by sending commands 101, 102, and 102 sequentially. Details are as follows:
TCP/IP sends command 101, with content
101, 1, 0, 1, …, expecting to obtain all the available targets.TCP/IP sends command 102 to obtain part of the targets.
TCP/IP receives the data returned by executing command 102. The content is
102, 1100, 0, 20, …, indicating 20 targets have been obtained and not all targets have been obtained.TCP/IP sends command 102 again to fetch the remaining targets.
TCP/IP receives the data returned by executing command 102 again. The content is
102, 1100, 1, 2, ..., which includes 2 targets and indicates all the targets have been obtained.
TCP send string = 101, 1, 0, 1, -0, -20.63239, -107.81205, -0, -92.81818, 0.0016
TCP received string = 101, 1102
TCP send string = 102, 1
TCP received string = 102, 1100, 0, 20, 0, 95.7806085592122, 644.5677779910724, 401.1013614123108, 31.12068316085427, ...
TCP received string = 78549940546, -179.99999999999991.0.0, 329.228345202334.712.7061697180302.400.9702665047771, ...
TCP received string =39546, -83.62567351596952, -170.87955974536686, -179.99999999999937, 0, 0, 223.37118373658322, ...
TCP received string = 005627, 710.1004355953408, 400.82227273918835, -43.89328326393665, -171.30845207792612, ...
TCP received string = 20.86318821742358, 838.7634193547805, 400.79807564314797, -102.03947940869523, -171.149261231 ...
TCP received string = 390299920645, -179.99999999999994, 0, 0, 303.0722145720921, 785.3254917220695, 400.75827437080, ...
TCP received string = 99668287.77.78291612041707, -171.53941633937786, 179.99999999899997, 0.0, 171.47819668864432, ...
TCP received string = 332193785, 400.6472716208158, -94.3418019038759, -171.10001228964776, -179.39999999999994, ...
TCP received string = 92388542936, 807.5641001485708, 400.6021999602664, - 167.9834797197932.-171.39671274951826, ...
TCP received string = 278.3198007132188, 780.5325992145735, 400.4924381003066, -174.72728396633053, -171.422604771 ...
TCP received string = 3.99999999999994, 0, 0, 183.82195326381233, 862.5171519967056.400.422966515846.-154. 17801945 ...
TCP received string = 173.34301974982765, -180.0, 0, 0
TCP send string = 102, 1
TCP received string = 102, 1100, 1, 2, 0, 315.2017788478321, 592.1261793743445, 399.60526335590957, 126.19602189220371, ...
TCP received string = 686127, -171.44430002882129, -1.3381805753922965e-15, 0, 0
Command 103: Switch Mech-Vision Recipe¶
This command switches the parameter recipe used by the Mech-Vision project.
In Mech-Vision, you can change the settings of a group of parameters by switching the parameter recipe.
Parameters involved in recipe switching usually include point cloud matching model, image matching template, ROI, confidence threshold, etc.
This command needs to be used before executing command 101 which starts the Mech-Vision project.
Command Sent¶
103, project number, recipe number
Project number
The integer ID number of the Mech-Vision project in Mech-Center, i.e., the number shown on the left of the project path in in Mech-Center. The number can be adjusted by dragging the projects.
Recipe number
The ID number of the parameter recipe to switch to, i.e., the number on the left of the parameter recipe name in in Mech-Vision.
Recipe number range: 1—99.
Data Returned¶
103, status code
Status code
If there is no error, status code 1107 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 103 is executed normally without errors.
TCP send string = 103, 1, 2
TCP received string = 103, 1107
Error: invalid recipe number.
TCP send string = 103, 1, 2
TCP received string = 103, 1102
Command 110: Get Custom Output Data from Mech-Vision¶
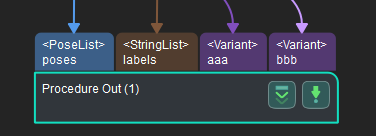
This command is for receiving custom data, i.e., data other than poses and labels, from Step “Procedure Out” in Mech-Vision (when the parameter “Port Type” is set to “Dynamic”).
Executing this command once only fetches one pose and its corresponding labels, scores, etc. (if any) from the vision result. If expecting to receive multiple poses, please execute this command multiple times.
Command Sent¶
110, project number
Project number
The integer ID number of the Mech-Vision project in Mech-Center, i.e., the number shown on the left of the project path in in Mech-Center. The number can be adjusted by dragging the projects.
Data Returned¶
110, status code, pose transmission completion status, number of custom data items, robot TCP transformed from object pose, label, custom data items, ..., custom data items
Status code
If there is no error, status code 1100 will be returned. Otherwise, the corresponding error code will be returned.
After executing this command, if the results from Mech-Vision have not been returned, Mech-Center will wait before sending the results to the robot. The default wait time is 10 seconds. If a timeout occurs, the timeout error status code will be returned.
pose transmission completion status
0: Not all poses in the vision result have been transmitted.
1: All poses in the vision result have been transmitted.
Number of custom data items
The total number of custom data items of data types other than poses and labels.
For example, if aaa is a list with 3 items and bbb is a list with 3 items, when executing this command to fetch one item from each list, the parameter value is 1+1=2; if aaa and bbb are both single variables, the parameter value is still 1+1=2.
Pose
The TCP under the robot frame. Mech-Vision outputs the object pose, and the pose is transformed into robot TCP by Mech-Center. Step “Procedure Out” must have a port for poses.
A TCP for an object pose is usually generated by flipping the z-axis of the object pose.
Label
Object info label corresponding to the pose. The label should be a positive integer. If not, it should be mapped to a positive integer in the Mech-Vision project by Step Label Mapping. If there is no port for labels on Step “Procedure Out”, the field is filled with 0.
Custom data
The custom data for the corresponding port of custom data type on Step “Procedure Out”.
The custom data parameters are arranged in alphabetical order A–Z by port name.
Command 201: Start Mech-Viz Project¶
This command is for scenarios using both Mech-Vision and Mech-Viz.
This command starts the running of the Mech-Viz project, calls the corresponding Mech-Vision project, and lets the Mech-Viz project plan the robot path based on the vision points from Mech-Vision.
For the Mech-Viz project that needs to be started, the option Autoload needs to be checked in Mech-Viz’s interface.
Please see Example Mech-Viz Projects for Standard Interface for the description of example Mech-Viz projects.
Command Sent¶
201, pose type, robot pose
Pose type
0:
The current pose of the robot is not needed by Mech-Viz and no pose will be sent.
If the project works in the eye-to-hand mode, no robot image-capturing pose will be needed by the project.
In Mech-Viz, the simulated robot will move from the initial pose JPs = [0, 0, 0, 0, 0, 0] to the first target in the planned path.
1:
The robot pose will be sent to Mech-Viz and the pose sent is in the form of JPs and flange pose.
In Mech-Viz, the simulated robot will move from the input initial pose (i.e., the pose sent by this command) to the first target in the planned path.
Note
If in the scene, there are barriers that stand in the way from the initial pose JPs = [0, 0, 0, 0, 0, 0] to the first target in the planned path, the pose type must be set to 1.
Robot pose
The current JPs and flange pose of the real robot (if pose type is set to 1).
Data Returned¶
201, status code
Status code
If there is no error, status code 2103 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 201 is executed without error.
TCP send string = 201, 1, 0, -20.63239, -107.81205, 0, -92.81818, 0.00307
TCP received string = 201, 2103
Error: Mech-Viz does not support robot pose in TCP.
TCP send string = 201, 2, -0, 682.70355, 665.22266, 90, 179.99785, -89.99693
TCP received string = 201, 2015, 1
Command 202: Stop Mech-Viz Project¶
This command stops the running of the Mech-Viz project. This command is needed only when the Mech-Viz project fall into an infinite loop or cannot be stopped normally.
Command Sent¶
202
Data Returned¶
202, status code
Status code
If there is no error, status code 2104 will be returned. Otherwise, the corresponding error code will be returned.
Test Sample¶
Command 202 is normally executed.
TCP send string = 202
TCP received string = 202, 2104
Command 203: Select Mech-Viz Branch¶
This command specifies which branch the project should run along. For this command, the branching is implemented by a branch_by_msg Task, and this command selects the branch by specifying an exit port of the Task.
Before executing this command, the Mech-Viz project needs to be started by executing command 201.
When the Mech-Viz project runs to the branch_by_msg Task, it will wait for command 203 to specify which exit port of the Task, i.e., the branch, the project should run along.
Command Sent¶
203, branching Task ID, exit port number
Branching Task ID
The Task ID of the branch_by_msg Task.
This parameter is for specifying which branch_by_msg Task the branch selection should apply to.
The Task ID can be read in the Task’s parameters.
Exit port number
This parameter is for specifying which exit port of the specified Task, i.e., the branch, the project should run along. The value should be an integer ([1, N]).
Note
An exit port number is the 1-based index of the specified exit port on the Task. For example, if the specified exit port is the second exit port of the Task from left to right, the exit port number is 2.
Data Returned¶
203, status code
Status code
If there is no error, status code 2105 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 203 is executed normally without errors.
TOP send string = 203, 1, 1
TCP received string = 203, 2105
Error: invalid exit port number.
TCP send string = 203, 1, 3
TCP received string = 203, 2018, 1
Command 204: Set Move Index¶
This command is for setting the index parameter of a Task that involves sequential or separate motions or operations.
Tasks with index parameters include move_list, move_grid, custom_pallet_pattern, smart_pallet_pattern, etc.
Before executing this command, command 201 needs to be executed to start the Mech-Viz project.
Command Sent¶
204, Task ID, index value
Task ID
This parameter specifies which Task the index setting should apply to.
The Task ID can be read in the Task’s parameters.
Index value
The index value that should be set the next time this Task is executed.
When this command is sent, the current index value in Mech-Viz will become the parameter value minus 1.
When the Mech-Viz project runs to the task specified by this command, the current index value in Mech-Viz will be increased by 1 to become the parameter’s value.
Data Returned¶
204, status code
Status code
If there is no error, status code 2106 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 204 is executed normally without errors.
TCP send string = 204, 2, 6
TCP received string = 204, 2106
Error: Failed to set the index.
TCP send string = 204, 3, 6
TCP received string = 204, 2028, 1
Command 205: Get Planned Path¶
This command gets the robot motion path planned by Mech-Viz after command 201 is executed to start the Mech-Viz project.
Note
In TCP/IP, by default, command 205 can only fetch at most 20 targets of the planned path at a time. So, command 205 may need to be executed repeatedly until all the targets required are obtained.
Note
If one of the targets in the path is not supposed to be sent to the robot, please clear the parameter “Send Target” checkbox of the corresponding move-type Task.
Command Sent¶
205, target type
Target type
This parameter specifies the type of path targets to return from Mech-Viz.
1: The targets returned should be in JPs.
2: The targets returned should be in TCP.
Data Returned¶
205, status code, transmission completion status, number of points, position of "visual_move", target, target, ...
Status code
If there is no error, status code 2100 will be returned. Otherwise, the corresponding error code will be returned.
Note
When executing this command, if Mech-Viz has not yet had the planned robot motion path (the project is still running), Mech-Center will wait. The default wait time is 10 seconds. If a timeout occurs, a timeout error code will be returned.
Transmission completion status
0: Not all the targets of the planned path have been obtained. Please repeat executing this command until this parameter’s value is 1.
1: All the targets of the planned path have been obtained.Note
If the expected number of targets to transmit is greater than 20 (20 is the default setting), please execute command 205 multiple times until the returned value of this parameter is 1.
Number of points
This parameter indicates the number of path targets ([pose, label, velocity]) sent by executing this command this time.
Default range: 0 to 20.
Position of “visual_move”
The position of the visual_move Task, i.e., the move to the vision pose (usually the pose for picking the object) in the entire robot motion path.
For example, if the path is composed of Tasks move_1, move_2, visual_move, move_3 sequentially, the position of visual_move is 3.
If in the path there is no visual_move Task, the returned value will be 0.
Target
[pose, label, velocity]
Pose: Cartesian coordinates (XYZ) and Euler angles (ABC), or JPs, according to the pose type set by command 205.
Label: Label is the integer label assigned to the pose. If in the Mech-Vision project, the labels are strings, they need to be mapped to integers before outputting from the Mech-Vision project using Step Label Mapping. If there are no labels in the Mech-Vision project, the label defaults to 0.
Velocity: The non-zero velocity parameter percentage value for the move-type Task set in Mech-Viz.
Test Samples¶
Command 205 is executed without error.
TCP send string = 205, 1
TCP received string =205, 2100, 1. 2, 2, 8.307755332057372, 15.163476541700463, -142.1778810972881, -2.7756047848536745, -31.44046012182799, -96.94907235126934, 0, 64, 8.2 42574265592342, 12.130080796661591, -141.75872288706663-2.513533225987894, -34.8905853 039525, -97.19108378871277, 0, 32
Error: Mech-Vision runtime error.
TCP send string = 205, 1
TCP received string = 205, 2008, 1
Command 206: Get DO List¶
This command gets the planned DO signal list when there are multiple grippers, such as suction cup sections, to control.
For using this command:
In the parameters of the “set_do_list” Task:
Check “StandardInterface” under “Receiver”
Check “Get DO List from VisualMove”
Select a “visual_move” Task that needs the DO signal list at the bottom of the parameter panel
Before calling this command, command 205 needs to be executed to obtain the planned motion path by Mech-Viz.
Please deploy the Mech-Viz project based on the template project at /Mech-Center/tool/viz_project/suction_zone, and set the suction cup configuration file in the Mech-Viz project.
Data Returned¶
206, status code, DO signal value, DO signal value, ..., DO signal value
Status code
If there are no errors, status code 2102 will be returned. Otherwise, the corresponding error code will be returned.
DO signal value
There are 64 DO signal values, in integers, located at the tail of the data returned.
Range of valid DO values: [0, 999]. Placeholder value: -1.
Test Samples¶
Command 206 is normally executed. The obtained DO signal values: 11, 12.
TCP send string: 206
TCP receive string: 206, 2102, 11, 12, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1
Error: Mech-Viz did not provide a valid DO signal list.
TCP send string: 206
TCP receive string: 206, 2011, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1
Command 207: Read Mech-Viz Task Parameter¶
This command reads the values of specified parameters of specified Tasks. Please specify which parameters of which Tasks to read in Property Config under in Mech-Center.
Command Sent¶
207, config ID
Config File Content Format¶
read, config ID, Task ID, parameter key name
The lines starting with “#” are comment lines and take no effect when executing this command.
read
The string “read” indicates the command is for reading the parameter value.
config ID
The positive integer number for specifying the ID of the read operation. A config ID can only be used for reading one parameter. If reading multiple parameters, please use different config IDs.
Task ID
The ID of the Task that the parameter to read belongs to.
The Task ID can be read in a Task’s parameters.
Parameter key name
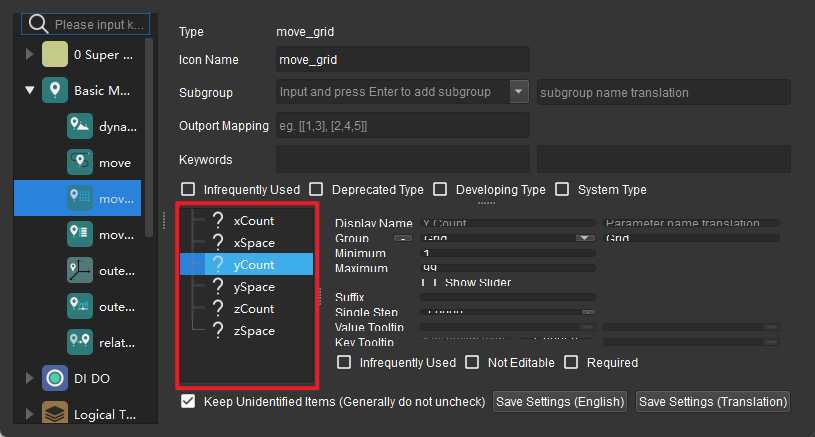
The key name of the parameter to read. Please find the key name in in Mech-Viz, as shown in the figure below.
Config File Content Example¶
read, 1, 10, digitalOutValue
read, 2, 2, xCount
read, 3, 2, yCount
read, 4, 5, allowVisionResultUnused
write, 1, 3, xOffset, 0.000000
write, 1, 3, yOffset, 0.000000
write, 1, 3, zOffset, 0.000030
write, 2, 7, delayTime, 0.1
Data Returned¶
207, status code, Task parameter value
Status code
If there is no error, status code 2109 will be returned. Otherwise, the corresponding error code will be returned.
Task parameter value
The value of the specified parameter of the specified Task in the Mech-Viz project.
Data types supported: INT, FLOAT, STRING.
Command 208: Set Mech-Viz Task Parameter¶
This command sets the values of specified parameters of specified Tasks. Please specify what values and which parameters of which Tasks to set in Property Config under .
Command Sent¶
208, config ID
Config File Content Format¶
write, config ID, Task ID, parameter key name, value
write
The string “write” indicates the command is for writing the parameter value.
config ID
The positive integer number for specifying the ID of the write operation.
A config ID can be used for reading multiple parameters.
Task ID
The ID of the Task that the parameter to write belongs to.
The Task ID can be read in a Task’s parameters.
Parameter key name
The key name of the parameter to read. Please find the key name in in Mech-Viz, as shown in the figure below.
Value
What value the specific parameter should be set to.
In addition to numbers, string values are also supported.
Config File Content Example¶
read, 1, 10, digitalOutValue
read, 2, 2, xCount
read, 3, 2, yCount
read, 4, 5, allowVisionResultUnused
write, 1, 3, xOffset, 0.000000
write, 1, 3, yOffset, 0.000000
write, 1, 3, zOffset, 0.000030
write, 2, 7, delayTime, 0.1
Data Returned¶
208, status code
If there is no error, status code 2108 will be returned. Otherwise, the corresponding error code will be returned.
Command 210: Get Move Target with Vision Planning Result¶
This command is for getting a single planned target from Mech-Viz. The target may be a target for a visual_move Task, or a target for one of other move-type Tasks. A target may contain pose, velocity, gripper info, object info, etc.
A target obtained by executing this command may be one of the followings.
A target of a move-type Task other than visual_move, with info including the motion type (joint motion or linear motion), gripper ID, and velocity.
A target of a visual_move Task, with info including the label, the total number of workobjects picked, planned number of workobjects for the next multi-pick, suction cup corner ID, TCP offset, workobject orientation, workobject group dimensions.
A target of a visual_move Task, with info output from Step “Procedure Out” in the Mech-Vision project. If the port type of the Step is set to “Dynamic”, the target will also include the custom data types.
Note
Usually, this command is used for projects in which the workobjects are boxes.
Note
Executing this command once only gets one target. If expecting to obtain multiple targets, please execute this command multiple times.
Command Sent¶
210, expected data format
Expected data format
Below are four expected data formats for the move target and vision planning result.
JPs, motion type, gripper ID, velocity, custom vision output 1, …, custom vision output N
TCP, motion type, gripper ID, velocity, custom vision output 1, …, custom vision output N
JPs, motion type, gripper ID, velocity, vision plan results, custom vision output 1, …, custom vision output N
TCP, motion type, gripper ID, velocity, vision plan results, custom vision output 1, …, custom vision output N
Custom vision outputs
The custom vision outputs are data of the specified output port types of Step “Procedure Out” in the Mech-Vision Project.
Vision plan results
The planning results for the visual_move Task, including the following info:
Labels: a field for 10 integers
Total number of workobjects picked
Planned number of workobjects for current multi-pick
Corner-edge ID: the suction cup corner ID can be found in the Vacuum Gripper Configurator in the visual_move Task
TCP offset
Object orientation
Workobject group dimensions
Data Returned¶
210, status code, target transmission completion status, target type, pose, motion type, gripper ID, velocity, vision plan results *, custom vision outputs *
* Whether there are vision plan results and/or custom vision outputs depends on the expected data format sent when executing the command.
Status code
If there is no error, status code 2100 will be returned. Otherwise, the corresponding error code will be returned.
Target transmission completion status
0: Not all targets have been transmitted.
1: All targets have been transmitted.
Target type
0: The target is not a visual_move Task target.
1: The target is a visual_move Task.
Pose
The target pose in JPs or TCP, depending on the parameter sent.
Motion type
1: joint motion, MOVEJ
2: linear motion, MOVEL
Gripper ID
The ID of the gripper used on the target. -1 means no gripper is used.
Velocity
The percentage value of the velocity at the target, i.e., the velocity set in the move-type Task in the Mech-Viz project.
Vision plan results
The planning result info in the target (if the target is a visual_move target). Usually used in carton multi-pick, depalletizing, etc. The info includes:
Labels: Object labels. Up to 10 positive integer labels are supported. The default values are zeros.
Total number of workobjects picked
Planned number of workobjects for the next multi-pick
Corner ID. The ID to indicate which corner of the gripper the workobjects are close to.
TCP offset: The offset from the original TCP on the workobject center to the actual TCP.
Orientation: The orientation of the workobject frame x-axis relative to the TCP x-axis.
Workobject dimensions.
Custom data from Mech-Vision
The custom data for the corresponding port of custom data type on Step “Procedure Out”.
The custom data parameters are arranged in alphabetical order A–Z by port name.
Aside from poses and labels, data from all other ports are considered custom data.
Command 501: Input Object Dimensions to Mech-Vision¶
This command is for dynamically inputting object dimensions into the Mech-Vision project.
Please confirm the actual object dimensions before running the Mech-Vision project.
The Mech-Vision project should have the Read Object Dimensions Step, and the Step’s parameter Read Object Dimensions from Parameters should be set to True.
Command Sent¶
501, project number, length, height, width
Project number
The integer ID number of the Mech-Vision project in Mech-Center, i.e., the number shown on the left of the project path in in Mech-Center. The number can be adjusted by dragging the projects.
Length, height, width
The object dimensions to input to the Mech-Vision project.
These values will be read by the Read Object Dimensions Step.
Unit: mm
Data Returned¶
501, status code
Status code
If there is no error, status code 1108 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 501 is executed without error.
TCP send string: 501, 1, 100, 200, 300
TCP receive string: 501, 1108
Error: Error code 3002, missing height value.
TCP send string: 501, 1, 100, 200
TCP receive string: 501, 3002
Command 502: Input TCP to Mech-Viz¶
This command is for dynamically inputting robot TCP into the Mech-Viz project.
The Task that receives the robot TCP is outer_move.
Please deploy the Mech-Viz project based on the template project at /Mech-Center/tool/viz_project/outer_move, and put the outer_move Task to a proper position in the workflow.
This command needs to be executed before executing command 201.
Data Returned¶
502, status code
Status code
If there is no error, status code 2107 will be returned. Otherwise, the corresponding error code will be returned.
Test Samples¶
Command 502 is executed without error.
TCP send string: 502, 0, 10, 10, 20, 0, 0
TCP received string: 502, 2107
Command 601: Notify¶
The user does not need to initiate this command.
When the Mech-Viz/Mech-Vision project runs to Step Notify or Task notify, Mech-Center will send the custom notification message defined in Step Notify or Task notify.
In Mech-Vision, Step Notify must be named “Standard Interface Notify”.
In Mech-Viz, in the parameters of Task notify, please check “StandardInterface” under “Receiver”.
Command Sent¶
None
Data Returned¶
601, custom notification message
Custom notification message
The notification message defined in the Notify Task/Step. The message must be an integer.
Test Sample¶
When the notification message defined in the Notify Task/Step is set to integer 1000, the project will return 1000 when running through the Notify Task/Step.
TCP receive string = 601, 1000
Command 701: Calibration¶
This command is for hand-eye calibration (camera extrinsic parameter calibration).
This command syncs the calibration status with Mech-Vision and fetches each calibration point that the robot needs to reach.
This command needs to be executed multiple times to complete the calibration.
Command Sent¶
701, calibration status, flange pose, JPs
Calibration status
0: Tell Mech-Vision to initiate the calibration.
1: The previous calibration point has been received by the robot.
2: The previous calibration point failed to be received by the robot.
Flange pose
The current flange pose of the robot.
JPs
The current JPs of the robot.
Data Returned¶
701, status code, calibration status, next calibration point's flange pose, next calibration point's JPs
Status code
This status code is for indicating the status of receiving the calibration point. If the calibration point is transmitted normally, status code 7101 will be returned. Otherwise, the corresponding error code will be returned.
Calibration status
1: Calibration is in progress.
0: Calibration finished.
Next calibration point’s flange pose
The flange pose of the next calibration point the robot should move to.
Next calibration point’s JPs
The JPs of the next calibration point the robot should move to.
Test Samples¶
Initiate the calibration.
TCP send string = 701, 0, 1371.62147, 25.6, 1334.3529, 148.58471, -179.24347, 88.75702, 88.86102, -7.11107, -28.82309, -0.44014, -67.6509, 31.4764
TCP received string = 701, 7101, 0, 1271.6969, -743374, 1334.34094, -3128422, 1792412, -91.11236, 93.28109, -12.0273, -32.8811, -0.37183, -68.41364, 27.02411
Obtain the calibration point from Mech-Vision (this process needs to be repeated to obtain multiple calibration points).
TCP send string = 701, 1, 1271.6969. -74.3374. 1334.34094. -3128422, 1792412 -91.11236, 93.28109, -12.0273, -32.8811, -0.37183, -68.41364, 27.02411
TCP received string = 701, 7101, 0, 1471.62226, -74.40452, 1334.34235. 148.56924, -179.24432, 88.74148, 92.8367, -2.14999, -24.25433, -0.39222, -67.23261, 27.485225
Finish the calibration.
TCP send string = 701, 1, 1371.60876, 25.53615, 1384.45532. -20.82704. 179.22026, -72.77879, 88.88467, -7.42242.-26.68142, -0.2991, -69.95593, 39.26262
TCP received string = 701 7101, 1, 1371.62147.25.6, 1334.3529. 148, 58471. -179 24347, 88.75702, 88.86102, -7.11107, -28.82309. -0.44014, -67.6509, 31.4764
Command 901: Get Software Status¶
This command is designed for checking the software running status of Mech-Vision, Mech-Viz, and Mech-Center. At present, this command only supports checking whether Mech-Vision is ready for running the project.
Data Returned¶
901, status code
Status code
Software status. 1101 means the Mech-Vision project is ready to run. Other codes mean the project is not ready.
Test Samples¶
Mech-Vision is ready for running the project.
TCP send string = 901
TCP received string = 901, 1101
Mech-Vision is not ready for running the project. Please open the project in Mech-Vision, right-click on the project in Projects List, and check Autoload Project.
TCP send string = 901
TCP received string = 901, 1001, 1