Parameter Adjustment for Point Cloud¶
3D Scanning¶
Tuning parameters under 3D Scanning can optimize the point cloud quality by optimizing the exposure. Please see 3D Scanning for details.
Point Cloud Processing¶
Tuning parameters under Point Cloud Processing can optimize the point cloud quality by optimizing the processing of the obtained data.
Cloud Smooth Mode¶
This parameter sets whether and how strongly the point cloud surface smoothing algorithm is applied. The options and descriptions are listed below.
Default: Normal
Hint
Intensity of smoothing: Off < Weak < Normal < Strong.
Option |
Description |
Off |
Apply no smoothing algorithm to retain object details as much as possible. |
Normal |
Apply moderate smoothing. Balance between smoothness and detail preservation. |
Weak |
Apply weak smoothing. Keep more details and apply less smoothing. |
Strong |
Apply strong smoothing. Keep fewer details and apply more smoothing. |
Cloud Outlier Filter Mode¶
This parameter sets whether and how strongly the point cloud outlier removal algorithm is applied. The options and descriptions are listed below.
Default: Normal
Hint
Intensity of outlier removal: Off < Weak < Normal.
Option |
Description |
Off |
Apply no outlier removal. Keep all noise. |
Weak |
Apply weak outlier removal. Remove a small amount of noise. Produce more accurate and complete edges. |
Normal |
Apply outlier removal. Remove all noise detected. Mild edge erosion may occur. |
Point Clouds under different intensities of outlier removal:
Off
Weak
Normal

Fringe Contrast Threshold¶
This parameter sets the signal contrast threshold for selecting valid pixels. Pixels with contrast less than this threshold will be ignored. A higher value means filtering more image noise but may remove point clouds of dark objects.
Default: 3
Usually, the default value 3 works well but you can increase the value for images with heavy noise.
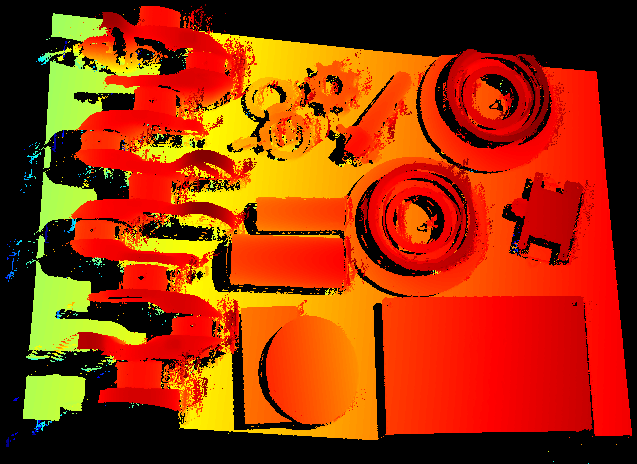
Point clouds obtained with different values of Fringe Contrast Threshold:
3
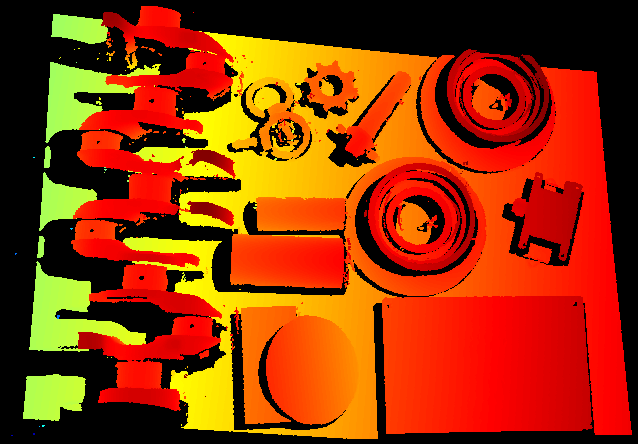
15
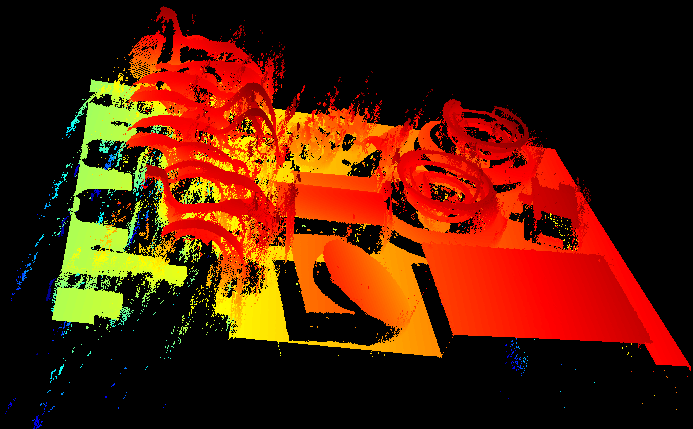
30
Hint
Usually, setting Cloud Smooth Mode and Cloud Outlier Filter Mode to
Normaland setting Fringe Contrast Threshold to3will help obtain satisfactory point clouds.If after tuning the parameters, the point cloud is still not satisfactory, please save the raw data of the camera and save the images via and , and contact the support team.
Depth Range¶
The upper limit and the lower limit of depth range are to set the interested range of depth on the depth map and ignore the parts of the depth map with depth values beyond the depth range.
Max range: 1 to 9,999 mm
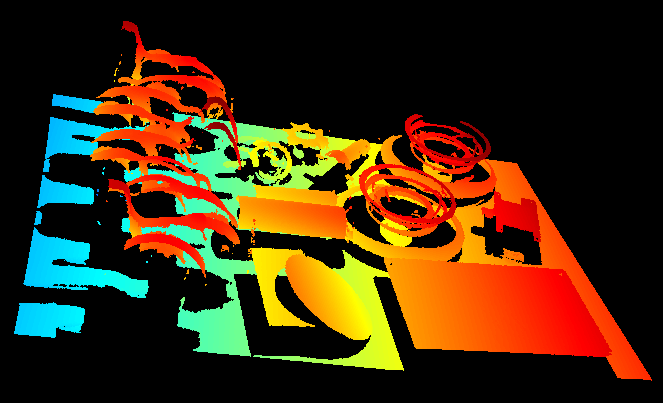
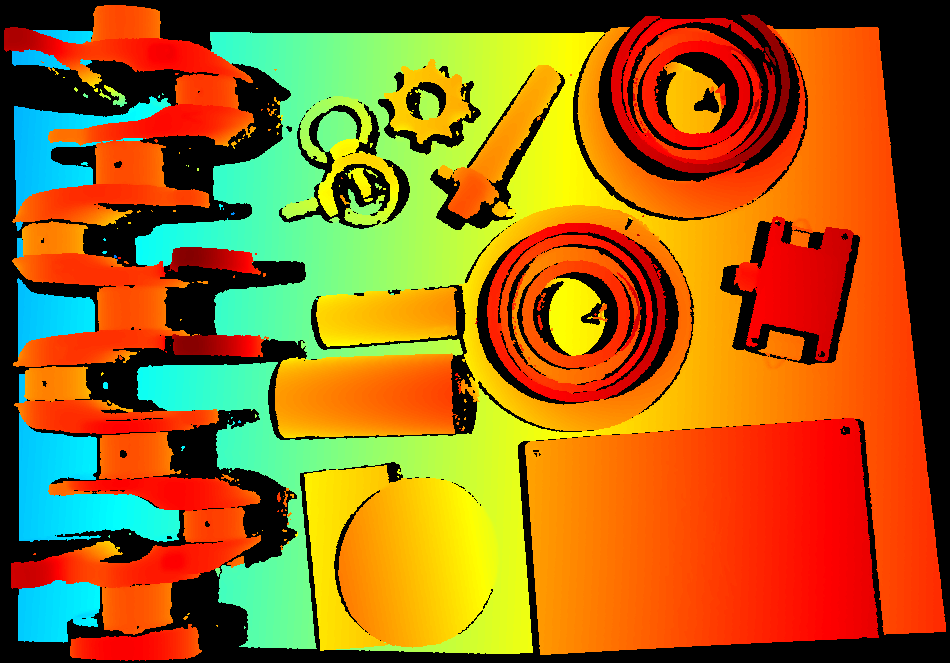
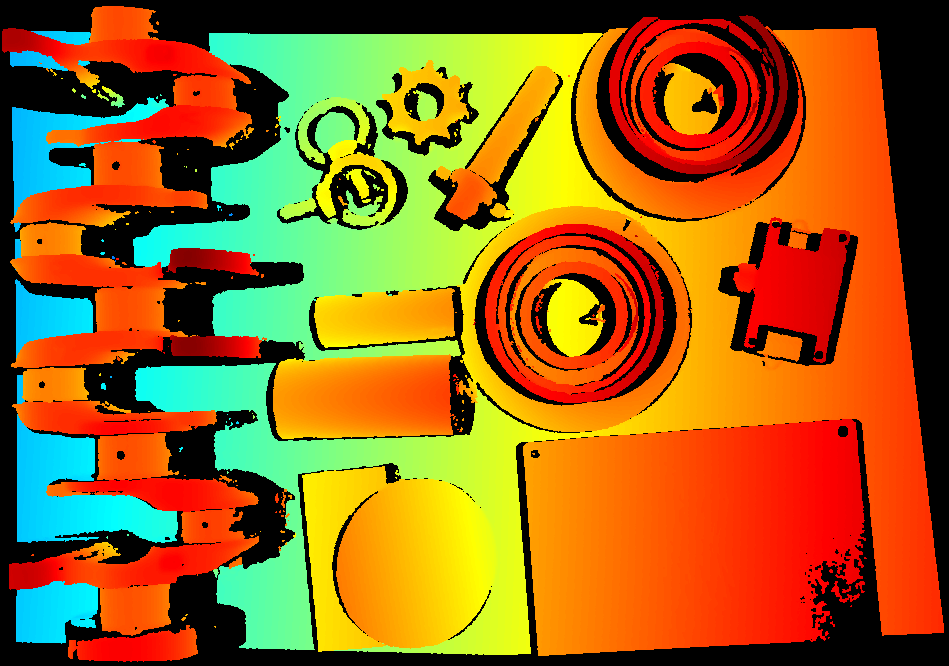
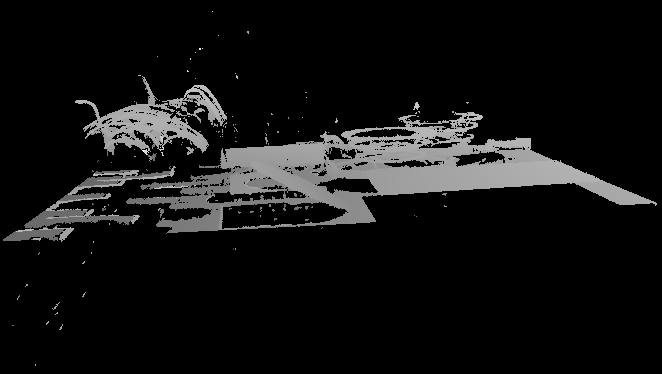
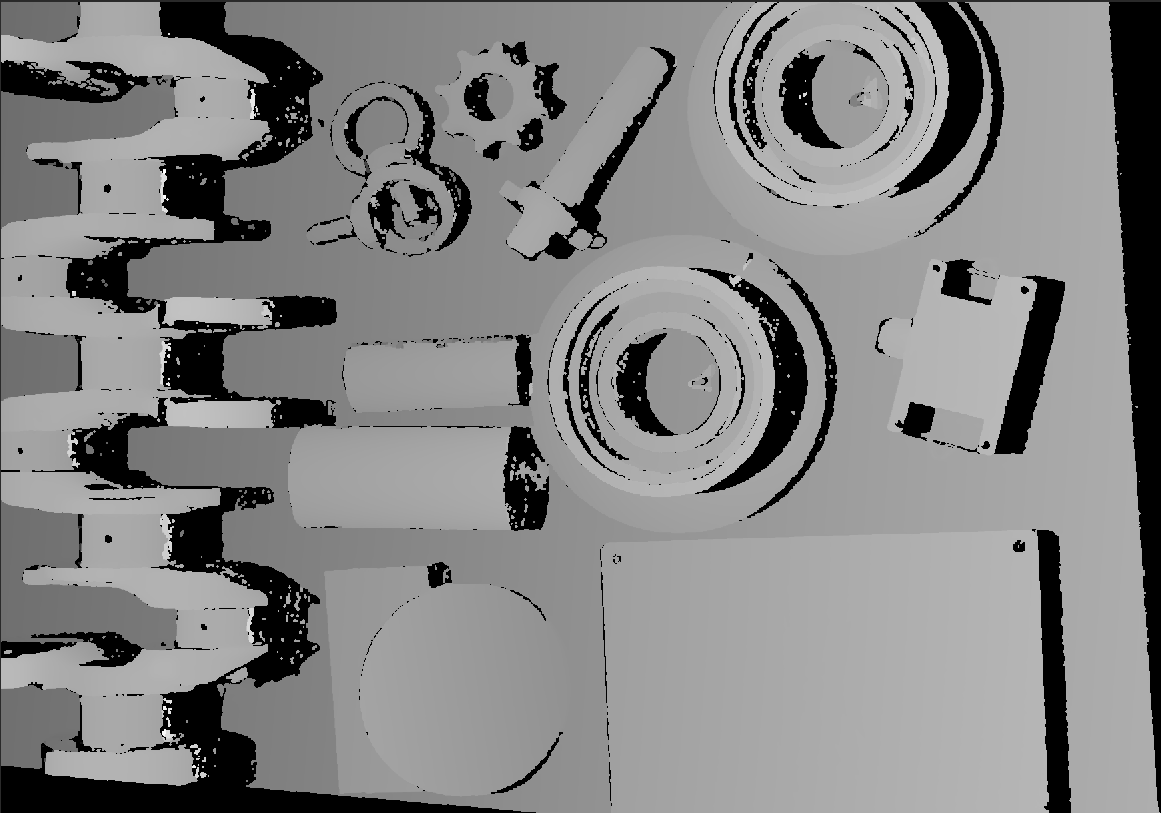
Depth maps under different depth range settings:
Too large
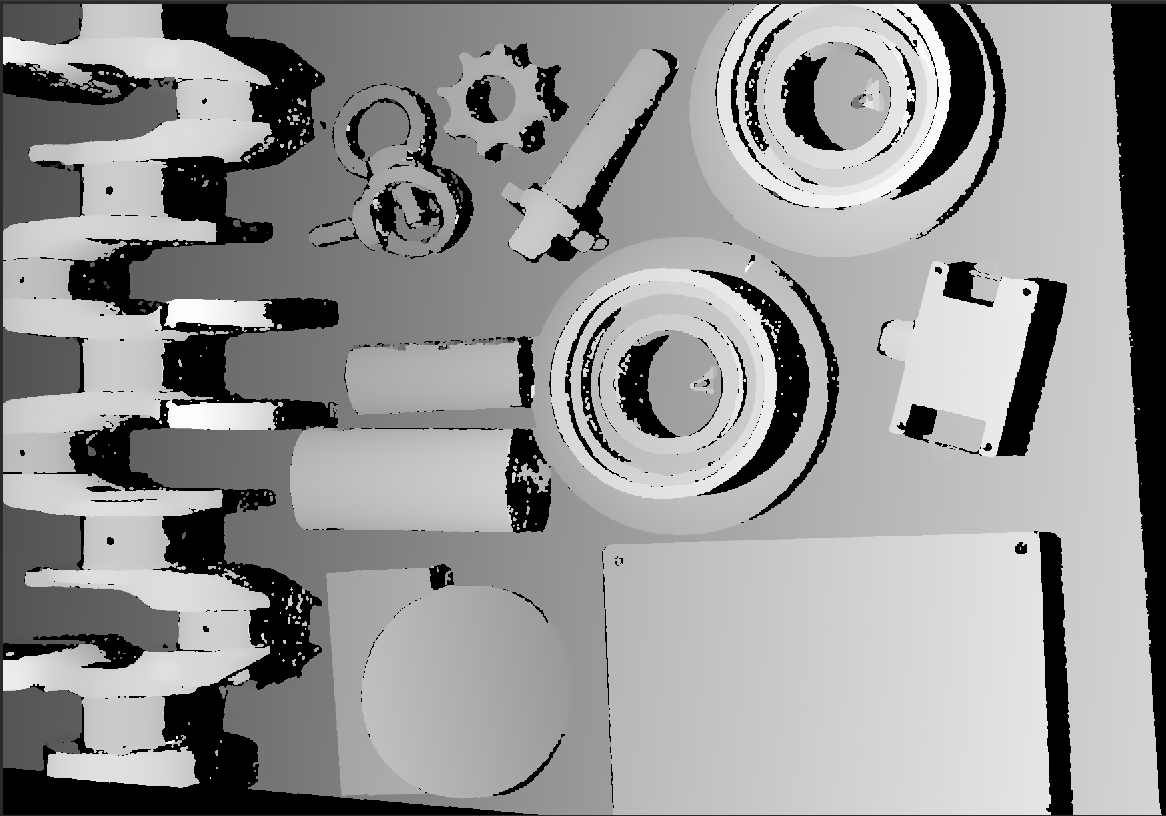
Moderate
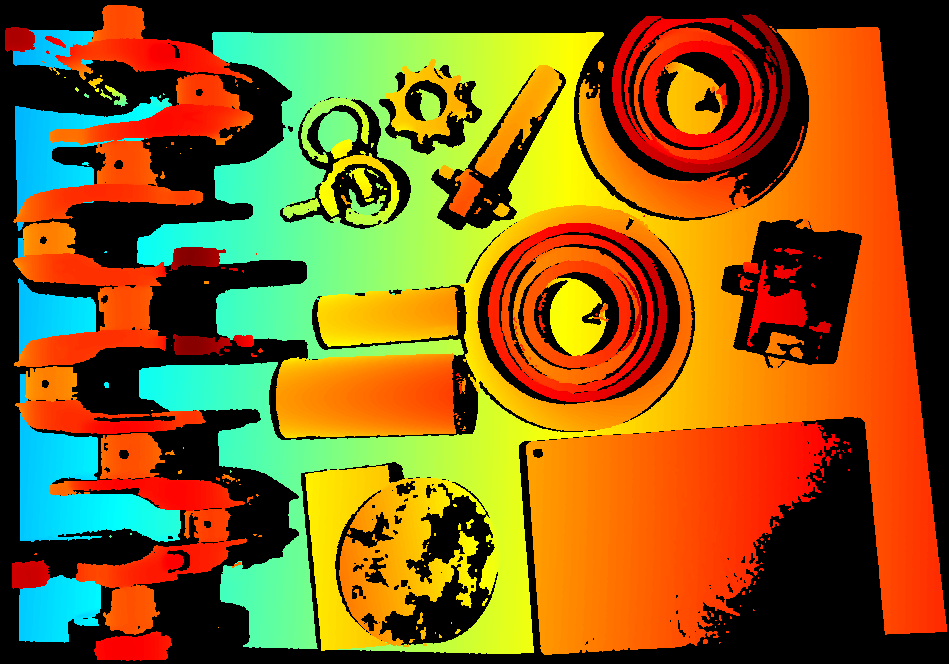
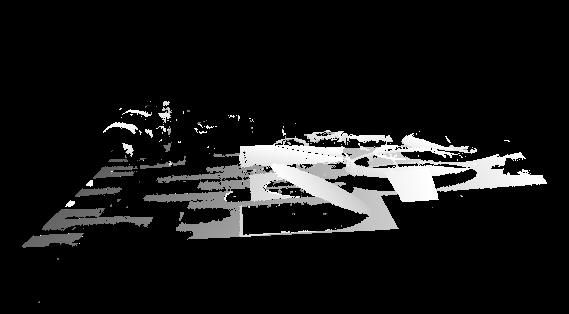
Too small

Hint
Please set an appropriate range to select the parts that are relevant to your projects. The range should not be too large or interference may be introduced. Nor should it be too small or the point cloud the key parts may be missing.