开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
注解
该步骤的内容正在维护中。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。
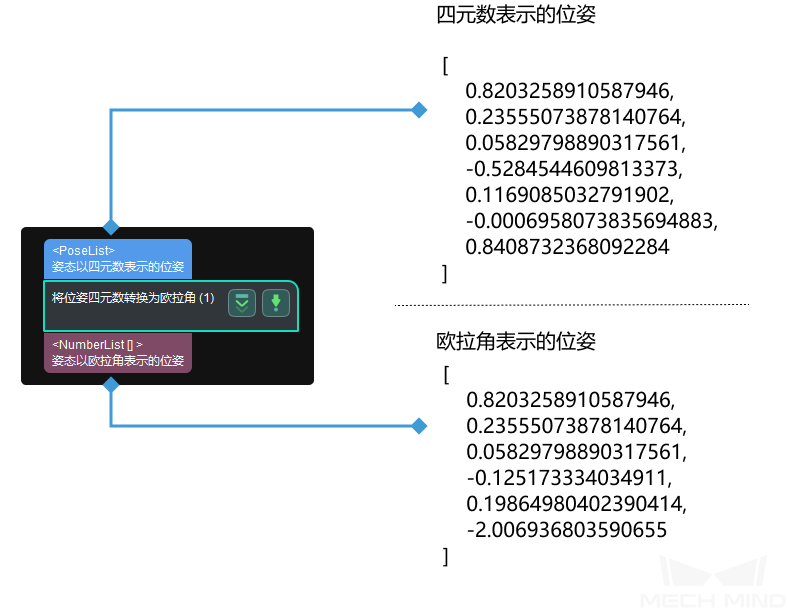
将位姿的表示方法从四元数更改为欧拉角。
通用的位姿表示方法转换步骤,无固定用法。