发送点云到外部服务¶
功能描述¶
本步骤可将点云发送给 Mech-Viz 。
使用场景¶
本步骤通常用于工程调试或查看工程实际效果。
输入与输出¶
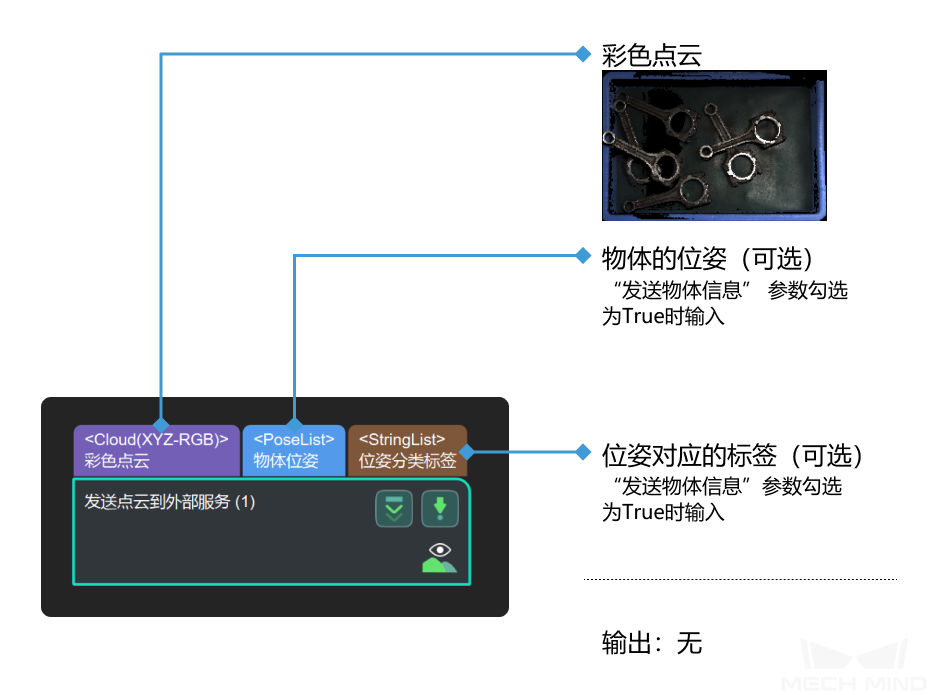
参数说明¶
点云设置
- 输入点云类型
- 默认值:CloudXYZRGB(彩色点云)值列表:CloudXYZRGB(彩色点云), CloudXYZ(点云), CloudNORMAL(法向点云)。调节说明:根据实际需求选择要发送的点云类型。调节实例:当分别选择 CloudXYZRGB、CloudXYZ 、CloudNORMAL 时,输入的点云类型分别如下图所示。



物体信息设置
- 发送物体信息
- 默认值:不勾选调节说明:不勾选时, 物体位姿 和 位姿分类标签 端口关闭;勾选后, 物体位姿 和 位姿分类标签 端口打开。需根据实际需求选择是否发送 物体位姿 和 位姿分类标签 。勾选前后效果如下图所示,图 ① 为勾选前,图 ② 为勾选后。

所有输入是在相机坐标系下
默认值:勾选。调节说明:若点云和位姿在相机坐标系下时,勾选此项,点云和位姿会被转换到机器人坐标系下再发给 Mech-Viz;取消勾选后,输入点云信息将直接发送给 Mech-Viz。