Set up Standard Interface Communication with JAKA¶
This topic introduces the process of setting up the Standard Interface communication with a JAKA robot.
Check Controller and Software Compatibility¶
Before loading the Standard Interface program, please check whether the version of the controller software is 1.7.
If the version of the robot controller is lower than 1.7, please upgrade it to 1.7, because the following steps involve the JAKA AddOn program, which requires a controller program version of 1.7.
If you are unable to upgrade the version of the controller software, please use JAKA’s programming function to write a Standard Interface program, and you do not need to install the AddOn program.
Hint
Download JAKA 1.7 Controller Software (the file name is 1.7.0.32.zip). After you unzip the file, the controller software is stored in the controller folder and the JAKA Zu APP is stored in the APP folder.
Connect the Robot with JAKA Zu APP¶
Please refer to the “Set up the Network Connection” part in JAKA Setup Instructions to connect the robot with the JAKA Zu APP.
Attention
You should use a JAKA Zu APP of version 1.7, the APP software package is stored in the App folder after you unzip the 1.7.0.32.zip file.
Set up “Robot and Interface Configuration” in Mech-Vision¶
Click Robot and Interface Configuration on the toolbar of Mech-Vision.
Select Listed robot from the Select robot drop-down menu, and then click Select robot model.
Select the robot model that you use, and then click Next.
Select the following options and click Apply.
Interface Type: Standard Interface
Protocol: TCP Server and ASCII
Make sure the Interface Service is started: on the toolbar of Mech-Vision, the Interface Service switch on the far right is flipped and turned to blue.
Load the File to the Robot¶
Load the AddOn File¶
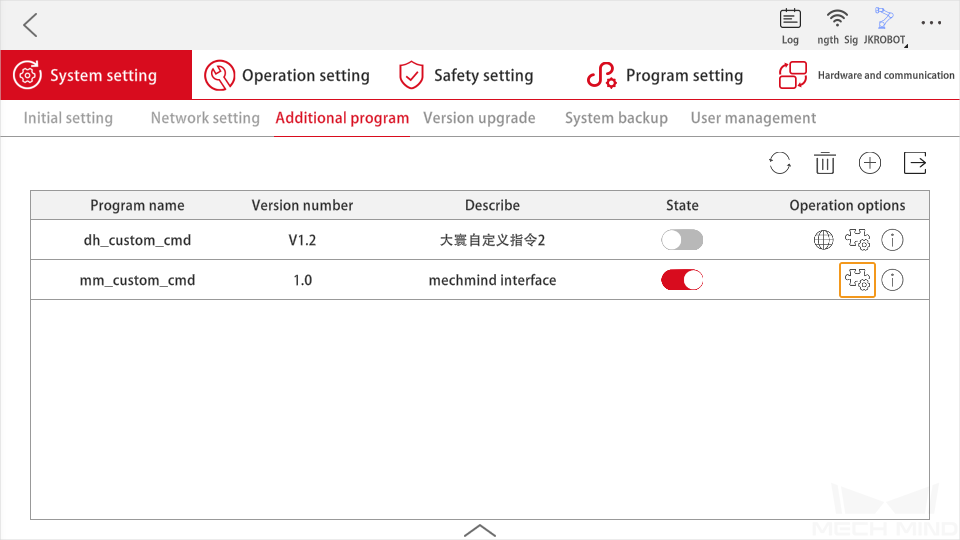
After you connect the robot with the JAKA Zu APP, click Settings in the upper right corner.
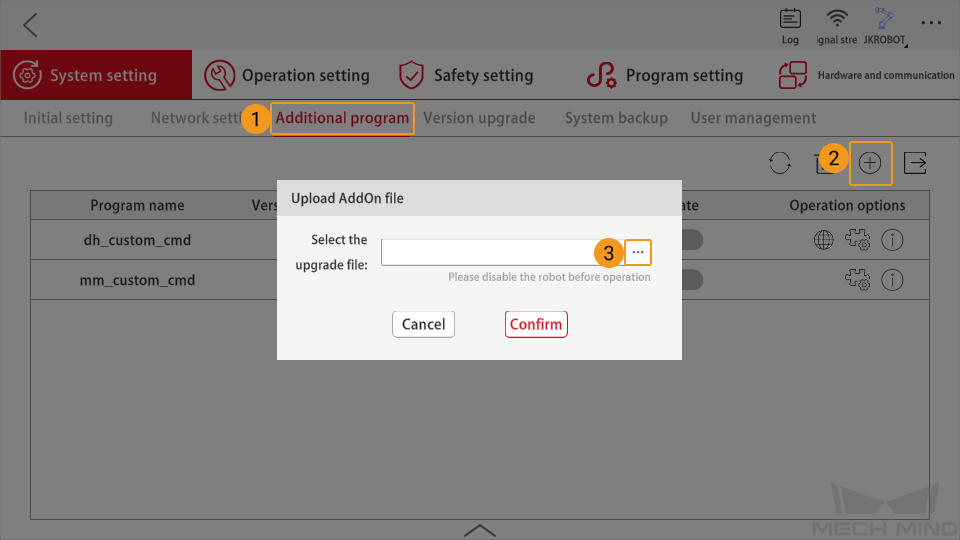
Click Additional program -> + -> ···.
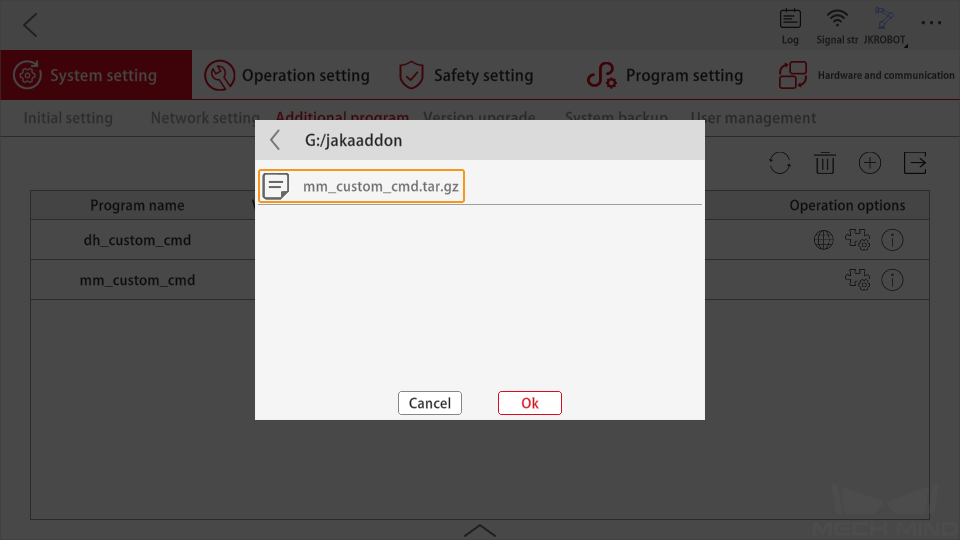
Select the mm_custom_cmd.tar.gz file and click OK. Then the program information of mm_custom_cmd will appear in the list.
Hint
The mm_custom_cmd.tar.gz file is stored in xxx\Mech-Mind Software Suite-x.x.x\Mech-Center\Robot_Interface\Robot_Plugin\JAKA_Addon in the installation directory of Mech-Mind Software Suite. You should copy the file to the device with JAKA Zu APP installed.
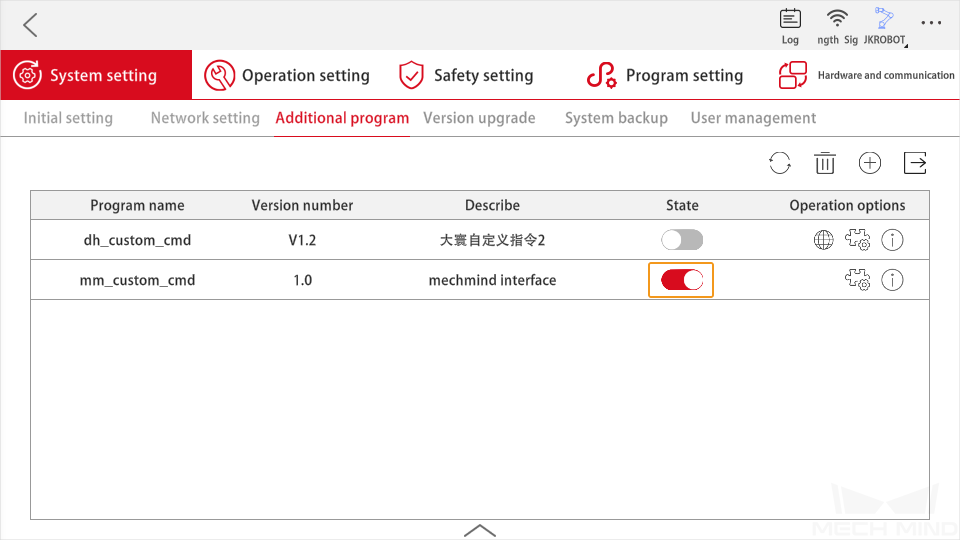
Click the State button of mm_custom_cmd to activate it.
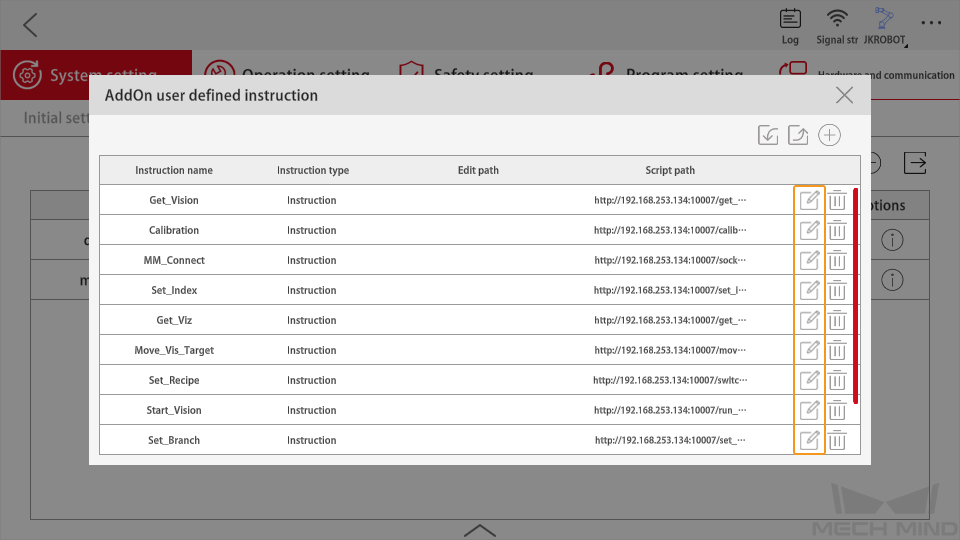
Click the instruction details button and the details will appear.
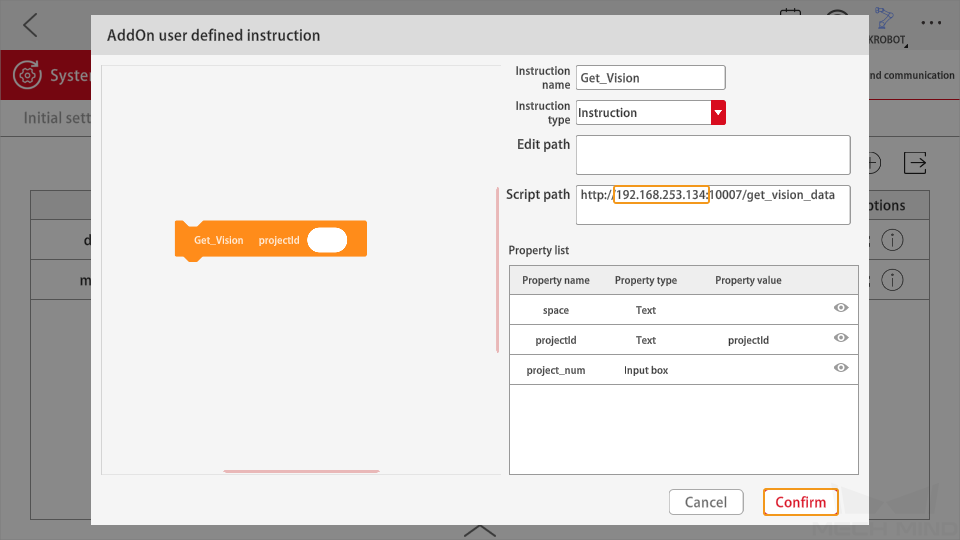
Click the edit button of each instruction one by one, and modify the IP address in the Script path to the IP address of the robot, and then click Confirm.
Load the Example Programs¶
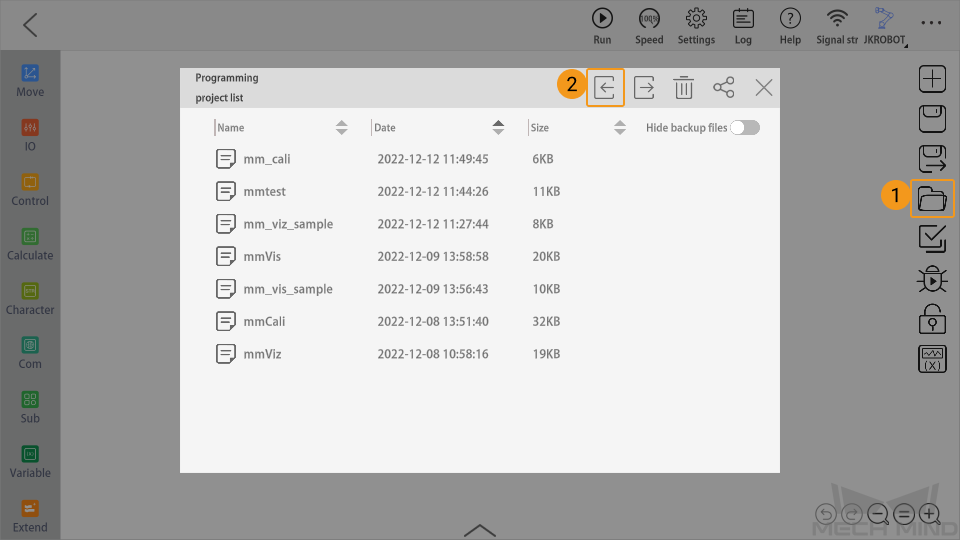
Go back to JAKA’s main interface, click Programming control in the lower left corner.
Click the folder icon on the right to open the file, and click Import.
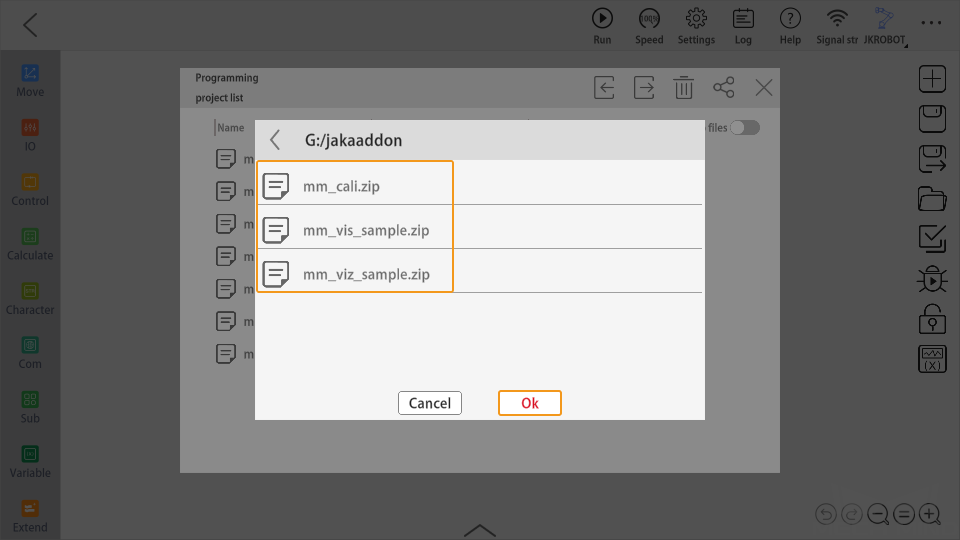
Select the 3 files in the figure below and click Ok.
Hint
The files in the figure below are stored in xxx\Mech-Mind Software Suite-x.x.x\Mech-Center\Robot_Interface\JAKA in the installation directory of Mech-Mind Software Suite.
Create System Variables¶
Before running the program, you should create 2 system variables, or else an error will occur.
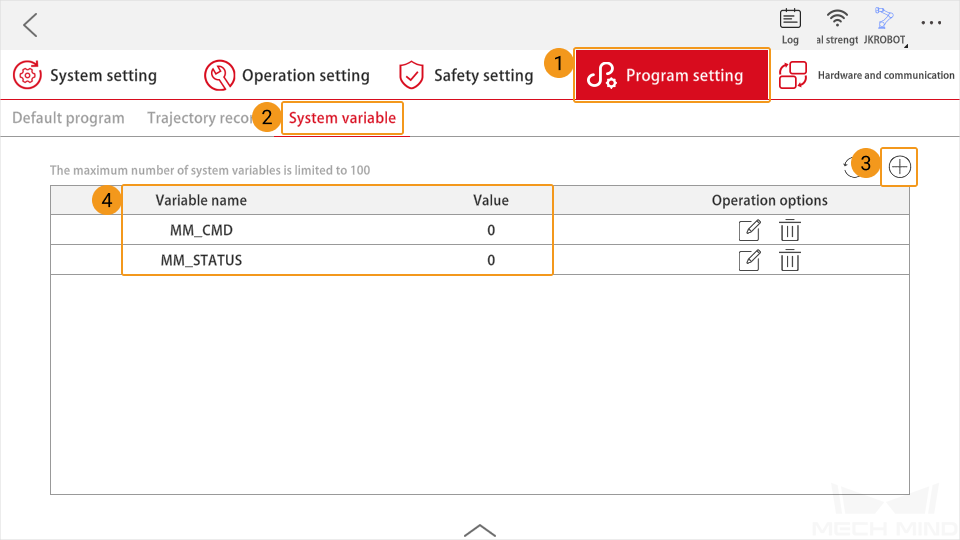
Go back to JAKA’s main interface, click Settings in the upper right corner.
Click Program setting -> System variable, and click the + button in the upper right corner, and create two variables (MM_CMD and MM_STATUS) as shown below. The initial values are 0.
Test Robot Connection¶
Go back to JAKA’s main interface, click Programming control in the lower left corner.
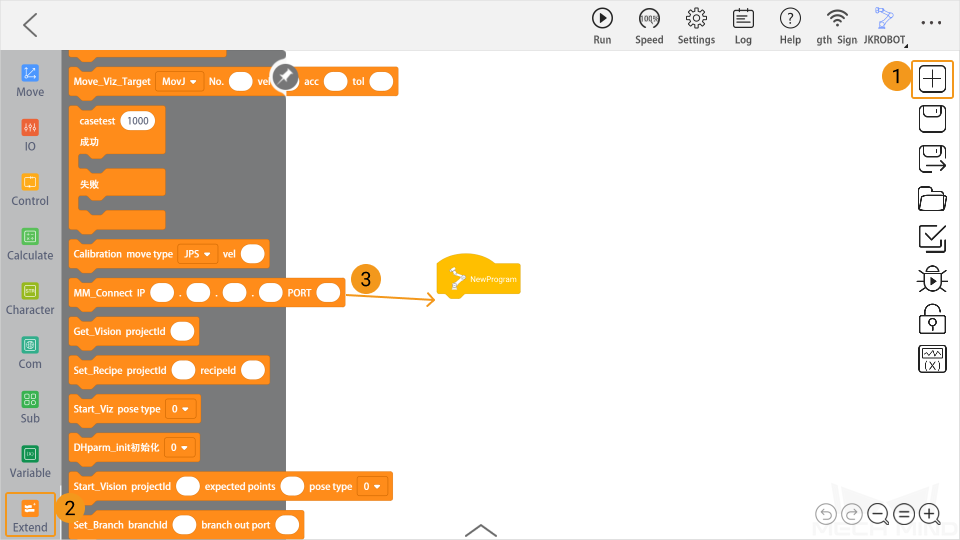
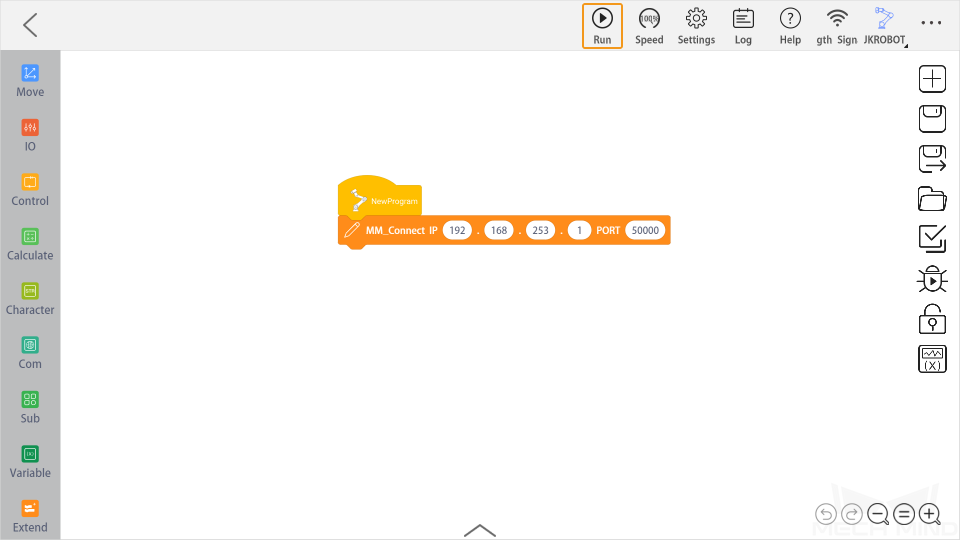
Click + on the right to create a new program.
Click Extend in the lower left corner, and drag MM_Connect to add it to the NewProgram, and then set the IP address and port number of the IPC.
Attention
The robot IP should be in the same subnet as the IPC.
Click Run on the toolbar.
The robot can be connected successfully if the Console tab of Mech-Vision Log panel displays messages indicating that the client is connected.