Calling Sequence of Standard Interface Commands¶
This section introduces the calling sequence and relations of Standard Interface commands. The specific command calling sequences for the robot and PLC are introduced separately.
Commands Called in the Robot Program¶
Depending on the project type, the commands called in the robot program can be divided into commands related to Mech-Vision projects and commands related to Mech-Viz projects.
Commands Related to Mech-Vision Projects¶
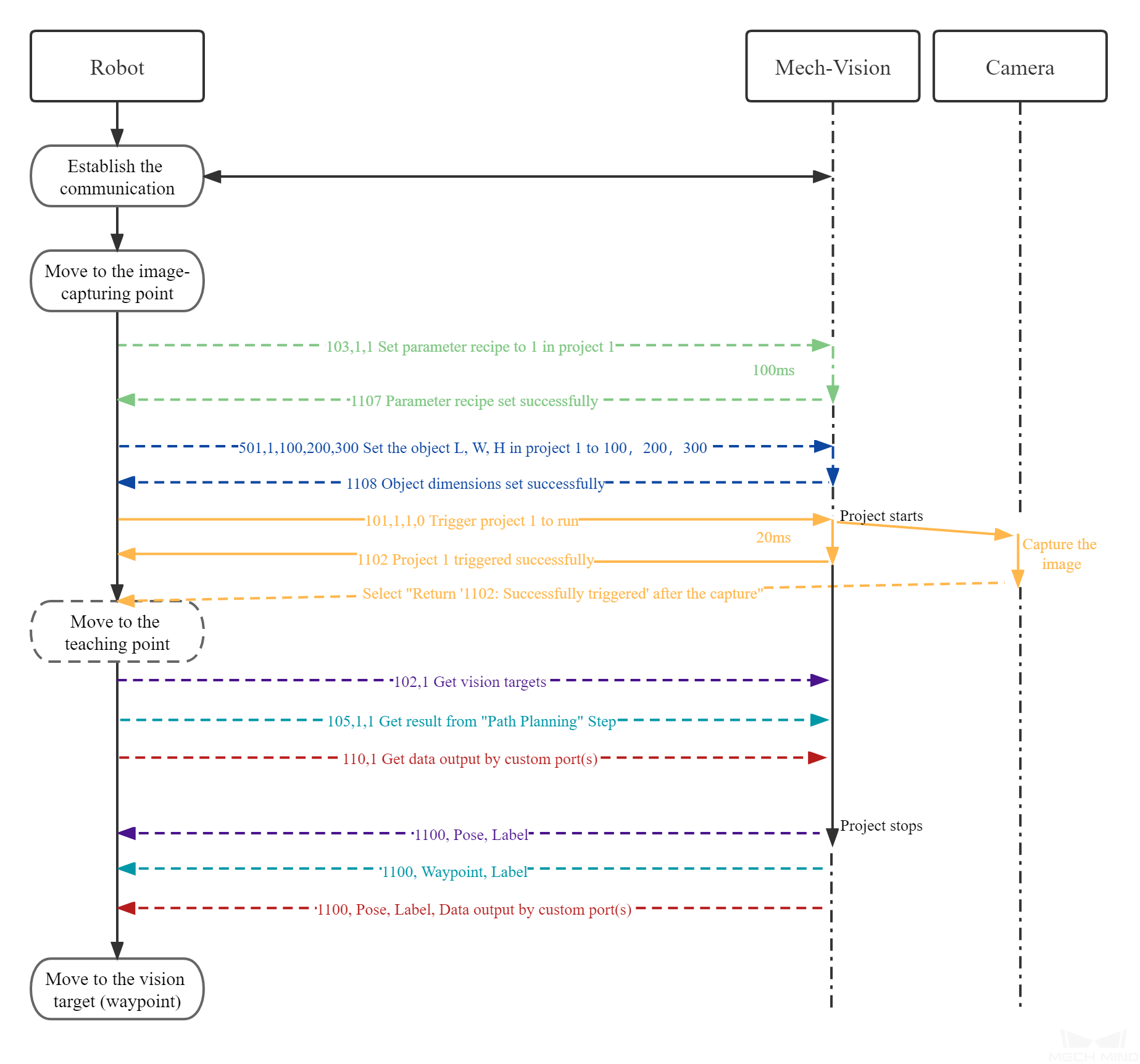
The sequence of calling commands related to Mech-Vision projects is as follows.
Commands that should be called BEFORE the Mech-Vision project is triggered by command 101:
Command 103: Switch Mech-Vision Recipe
Command 501: Input Object Dimensions to Mech-Vision
Command 101: Start Mech-Vision Project
Commands that are called DURING the execution of the Mech-Vision project:
Command 102: Get Vision Target(s)
Command 105: Get Result of Step “Path Planning” in Mech-Vision
Command 110: Get Custom Output Data from Mech-Vision
The time sequence diagram of commands related to Mech-Vision project is shown below. The dashed line indicates that the command is optional and you can call it according to the actual requirement, while the solid line indicates that the command must be called.
Commands Related to Mech-Viz Projects¶
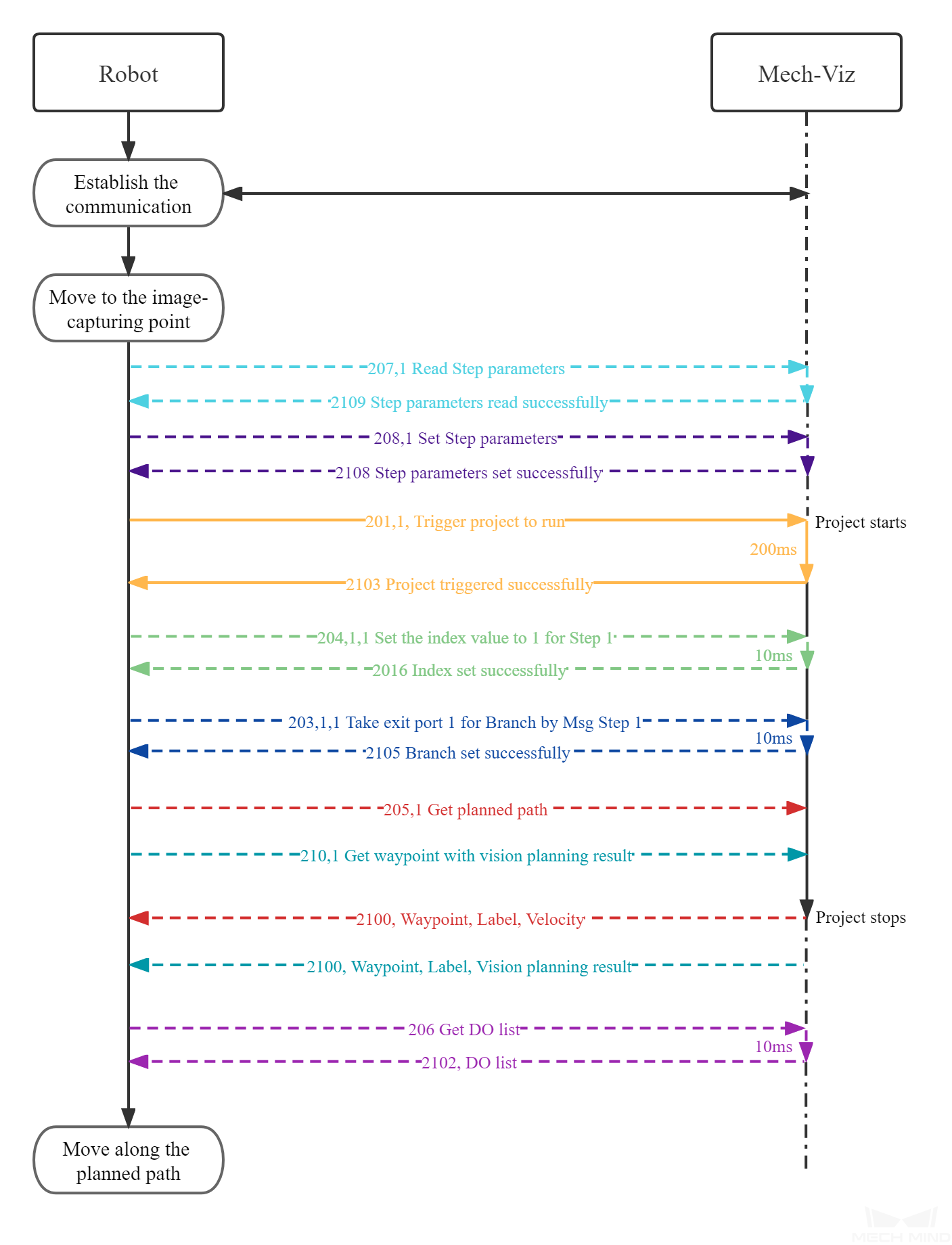
The sequence of calling commands related to Mech-Viz projects is as follows.
Commands that should be called BEFORE the Mech-Viz project is triggered by command 201:
Command 207: Read Mech-Viz Step Parameter
Command 208: Set Mech-Viz Step Parameter
Command 201: Start Mech-Viz Project
Commands that are called DURING the execution of the Mech-Viz project:
Command 204: Set Move Index
Command 203: Select Mech-Viz Branch
Command 205: Get Planned Path
Command 210: Get Waypoint with Vision Planning Result
Attention
Command 204 and command 203 should be called before command 205 and command 210.
Commands that should be called AFTER the Mech-Viz project is stopped:
Command 206: Get DO List
The time sequence diagram of commands related to Mech-Viz project is shown below. The dashed line indicates that the command is optional and you can call it according to the actual requirement, while the solid line indicates that the command must be called.
Commands Called in the PLC Program¶
The workflow of the PLC program to call commands is shown in the figure below.
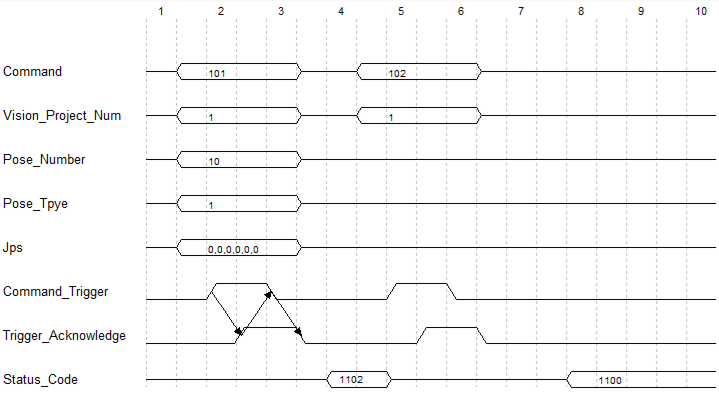
Notes:
According to the requirements of each command, the command number and the command parameters will be written to corresponding registers. For example, 101 will be written to Command, and 1 (the project ID) will be written to Vision_Project_Num.
When a command is triggered, the PLC will set the value of Command_Trigger to 1, and the vision system reads the command number and parameters.
After the vision system reads that Command_Trigger is 1, Trigger_Acknowledge will be set to 1.
After the PLC reads that Trigger_Acknowledge is 1, Command_Trigger will be set to 0, and then the command number and parameters of the next command will be written to the corresponding registers.
After the vision system reads that Command_Trigger is 0, Trigger_Acknowledge will be set to 0.
Please refer to Commands Related to Mech-Vision Projects and Commands Related to Mech-Viz Projects for the sequence of calling specific commands.