JPs Constraint¶
Note
Contents of this topic are under maintenance. If you need more information about this topic with urgency, please contact us at docs@mech-mind.net.
Definition of Terms
Shoulder: The relative positional relationship between the center of the wrist and Axis1. Axis1 refers to the rotation center axis of the robot axis 1.
Elbow: Relative positional relationship between wrist and LowerArm. LowerArm refers to the line connecting the rotation centers of the robot axis 2 and axis 3.
Wrist: Wrist refers to axis 5 of the robot. The negative wrist JPs suggests that the robot’s wrist can rotate in the negative direction.
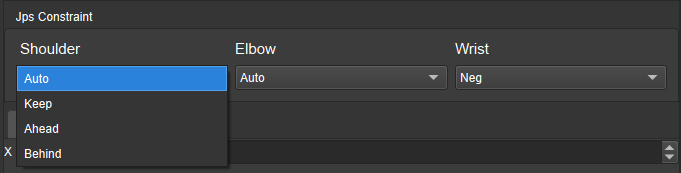
Options
Auto: There is no constraints on the motion of this joint. The optimal solution is the one in which each axis rotates the least.
Keep: Constrain the next JPs solution according to the current JPs status. For example, if the current JP of the axis 3 is positive, only solutions in which the JP of axis 3 is positive will be considered for the next waypoint.
Ahead: The wrist center is ahead of Axis1.
Behind: The wrist center is behind Axis1.
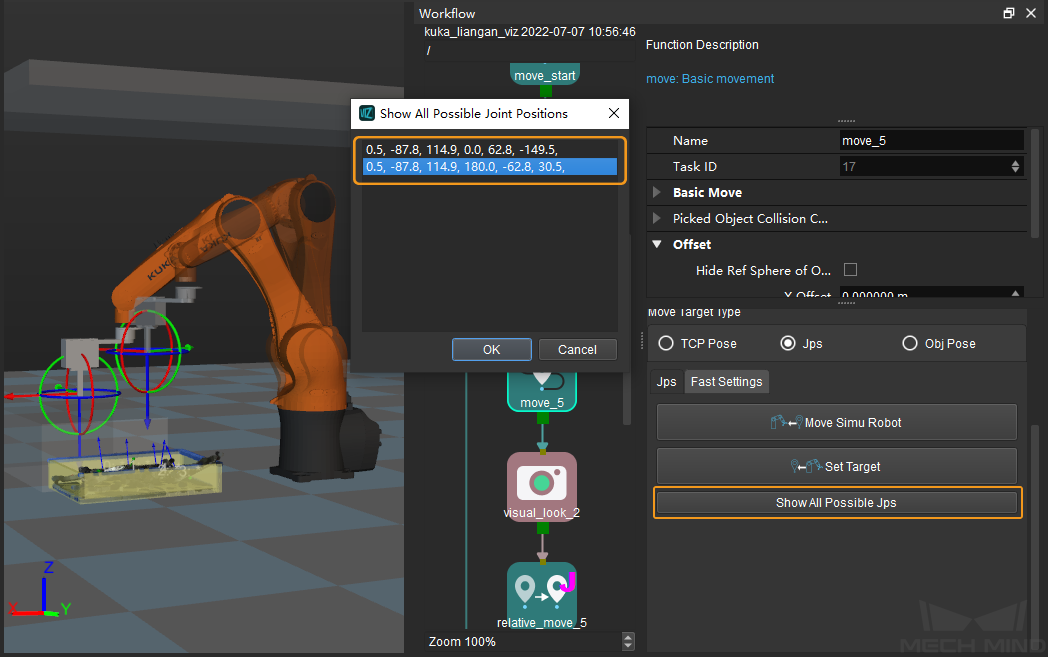
After clicking , a window showing all the JPs solutions to the current waypoint will pop up. After clicking one of the solutions, the corresponding pose of the solution will be displayed in the 3D simulation area. Therefore, you will know the possible solutions under different constraints, as shown below.
Attention
JPs constraint settings only apply to 6-axis robots. It is considered that 4-axis robots do not have abnormal shoulder, elbow, or wrist positions.
Relative Move, Smart Pallet Pattern, and Mixed Pallet Pattern do not support JPs constraint settings. There are default JPs constraint settings for these Steps, that is, the statuses of the shoulder, elbow, and wrist will not change, and the robot’s motion does not cross solution systems (does not go through singularities).