Waypoint Type¶
Note
Contents of this topic are under maintenance. If you need more information about this topic with urgency, please contact us at docs@mech-mind.net.
TCP: The waypoint will be represented by the X, Y, Z values and Euler angles or quaternions of the tool coordinate system.
JPs: The waypoint will be represented by the joint positions of the robot.
Workobject Pose: The waypoint will be represented by the X, Y, Z values and Euler angles or quaternions of the object coordinate system.
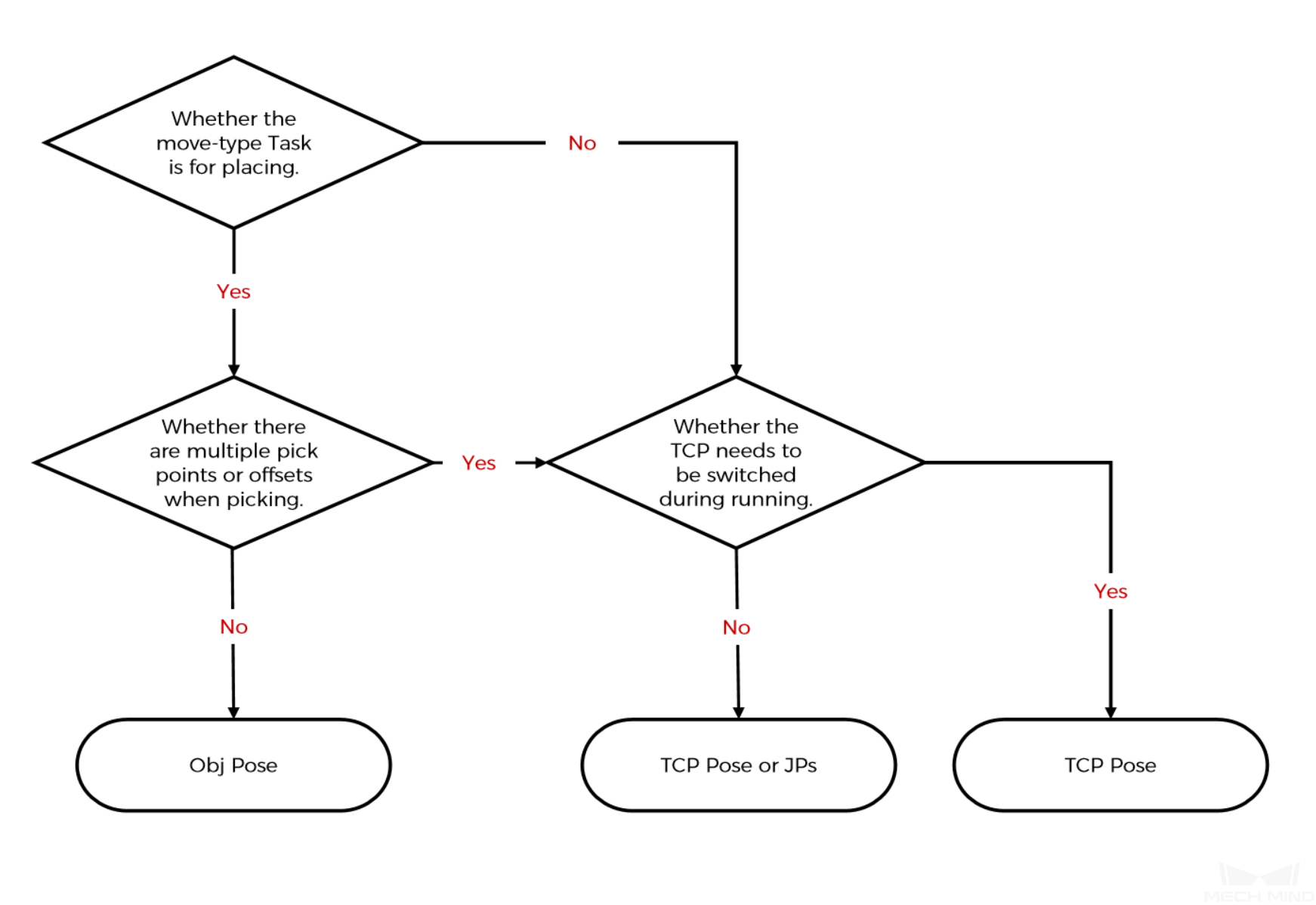
The method to determine the waypoint type is shown in the figure below.
Hint
Click the corresponding button to enter the pop-up window for related settings.
TCP & Workobject Pose
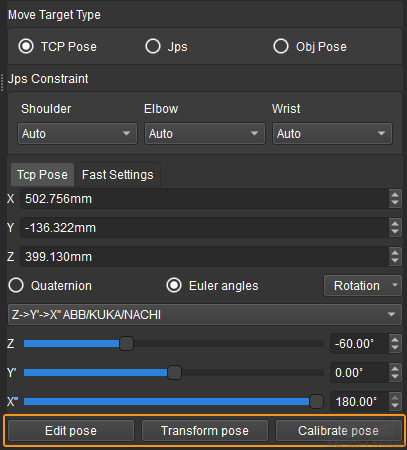
Edit Pose: Enter quaternion or Euler angle directly to adjust the pose. You can also copy and paste the pose.
Transform Pose: Transform the current pose to a new one. It is suitable for fine-tuning.
Calibrate Pose: Set the coordinate of P1, P2, and P3 according to the instruction, and then calibrate the object pose with three-point method. It is suitable for scenarios where the objects are tilted and their poses cannot be easily determined. For instance, when a cuboid tilts, its pose is hard to determine. Calibrate pose can be used here to calculate the cuboid’s pose and therefore the robot can run based on the calibrated pose.
JPs

Edit JPS: Similar to Edit Pose above; edit the JPs by copying and pasting or editing the JPs in either radians or degrees, which can be switched based on the actual requirement.
To Default HP: Click to bring the robot back to the home position specified in the robot configuration file (i.e. the default home position in Mech-Viz).
To User HP: Click to bring the robot back to the home position defined by the user. The user home position can be set in . If the user home position is not set, the default home position in Mech-Viz will be used.
Fast Settings
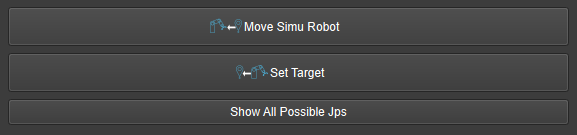
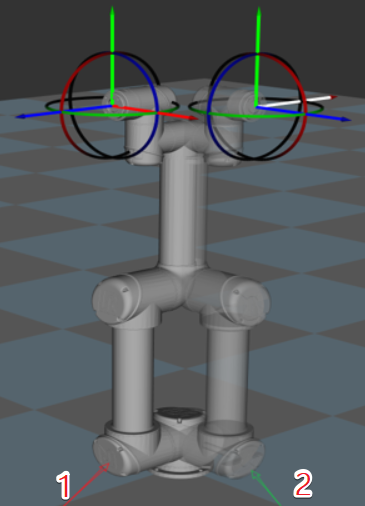
Move Simu Robot: Move the simulated robot model to the current waypoint position of the real robot, that is, move the simulated robot model from position 1 to position 2. Only the position of the simulated robot will be changed and the position of the real robot will not.
Set Waypoint: Set the waypoint to the position of the simulated robot model, that is, set the waypoint from position 1 to position 2. The position of the simulated robot will not be changed, while the waypoint will be changed.
Show all possible JPs: Show all the JPs solutions to the current waypoint. The maximum number of solutions is eight. Click Move Simu Robot to move the robot to the pose of the optimal solution.