Relative Move¶
Note
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net.
Function¶
This Step guides the robot to move relative to a known waypoint of a move-type Step. You can set the relative move in different coordinate systems and set the rotational move in different directions.
Usage Scenario¶
It is usually used before or after the Vision Move Step to guide the robot to move along the Z direction of the vision point.
Parameter Description¶
- Move-Type Step Common Parameters
Please refer to General Parameters of Move-Type Steps for detailed information.
- Held Workobject Collision Detection Settings
Please refer to Held Workobject Collision Detection Settings for detailed information.
- Basic move settings
Please refer to Basic Move Settings for detailed information.
- Relative Move Dependency
- Value List: Previous waypoint, Next waypointInstruction: When Previous waypoint is selected, the robot will move relative to the previous waypoint; when Next waypoint is selected, the robot will move relative to the next waypoint.
Coordinate System
Default Value: TCPValue List: TCP, Robot, Ref Point
TCP: Set the corresponding coordinate values, and the robot will be offset based on the TCP coordinate system, as shown below.

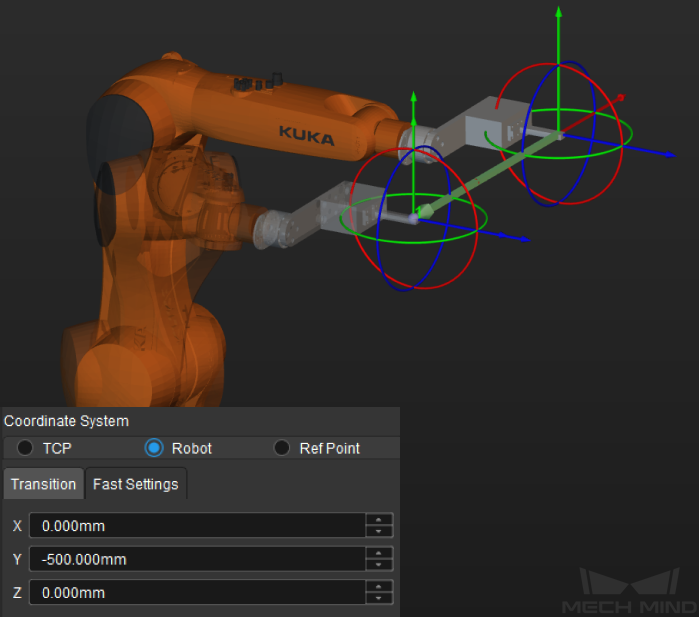
Robot: Set the corresponding coordinate values, and the robot will be offset based on the Robot coordinate system, as shown below.
Ref Point: You can use a reference point to customize a reference direction. For example, if the object is placed in a deep bin, and picking in the vertical direction may lead to collisions with the surfaces of the bin, you can select the Ref Point as the Coordinate System, and the robot will move in the direction towards the reference point.
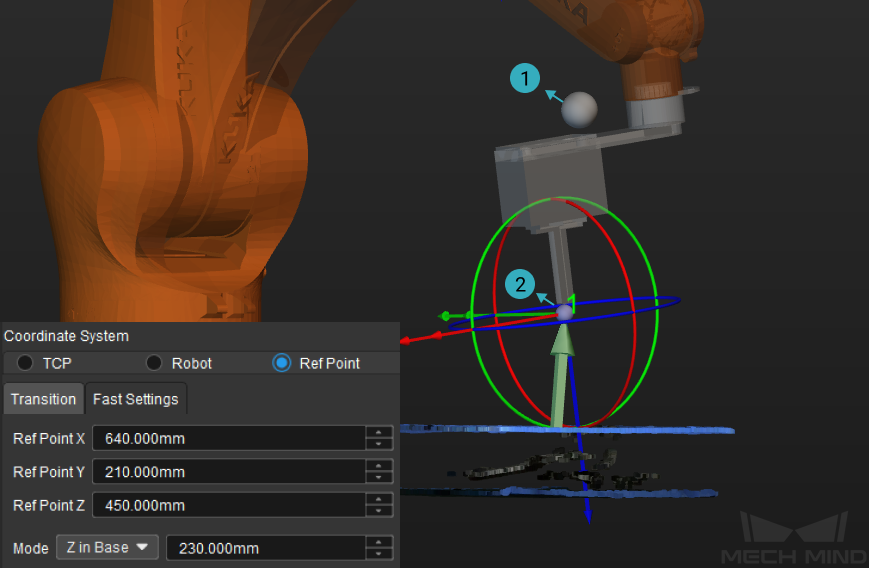 As shown in the figure above, 1 indicates the reference point and 2 indicates the offset point.Mode:Z in Base : The vertical distance of the offset point from the XOY plane in the robot base coordinate system.Move Dist : The distance that the offset point moves along the reference direction.
As shown in the figure above, 1 indicates the reference point and 2 indicates the offset point.Mode:Z in Base : The vertical distance of the offset point from the XOY plane in the robot base coordinate system.Move Dist : The distance that the offset point moves along the reference direction.
Lock X/Y/Z
Instruction: lockZ is usually used with the Vision Move Step to set the Z value of the waypoint in the current Relative Move Step to a specified value.Once lockZ is selected, a plane will appear in the 3D simulation area. The robot will move to the specified height after each picking, as shown below.