Details of the Project¶
Application Scenarios¶
The project is suitable for picking large workpieces with complex features which are placed neatly.
Project Workflow¶
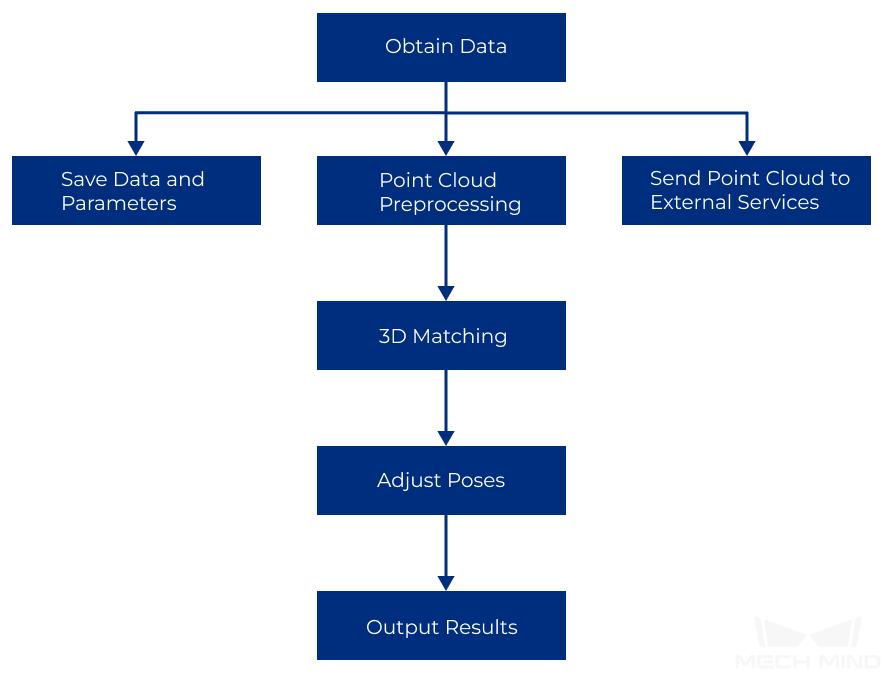
As the workpieces have obvious features, pose estimation can be easily done by matching between the object point cloud and a point cloud model. Also, the processing speed of the project can be fast without the aid of deep learning. The workflow of a typical project for large non-planar workpieces is shown below.
Explanation of the Steps¶
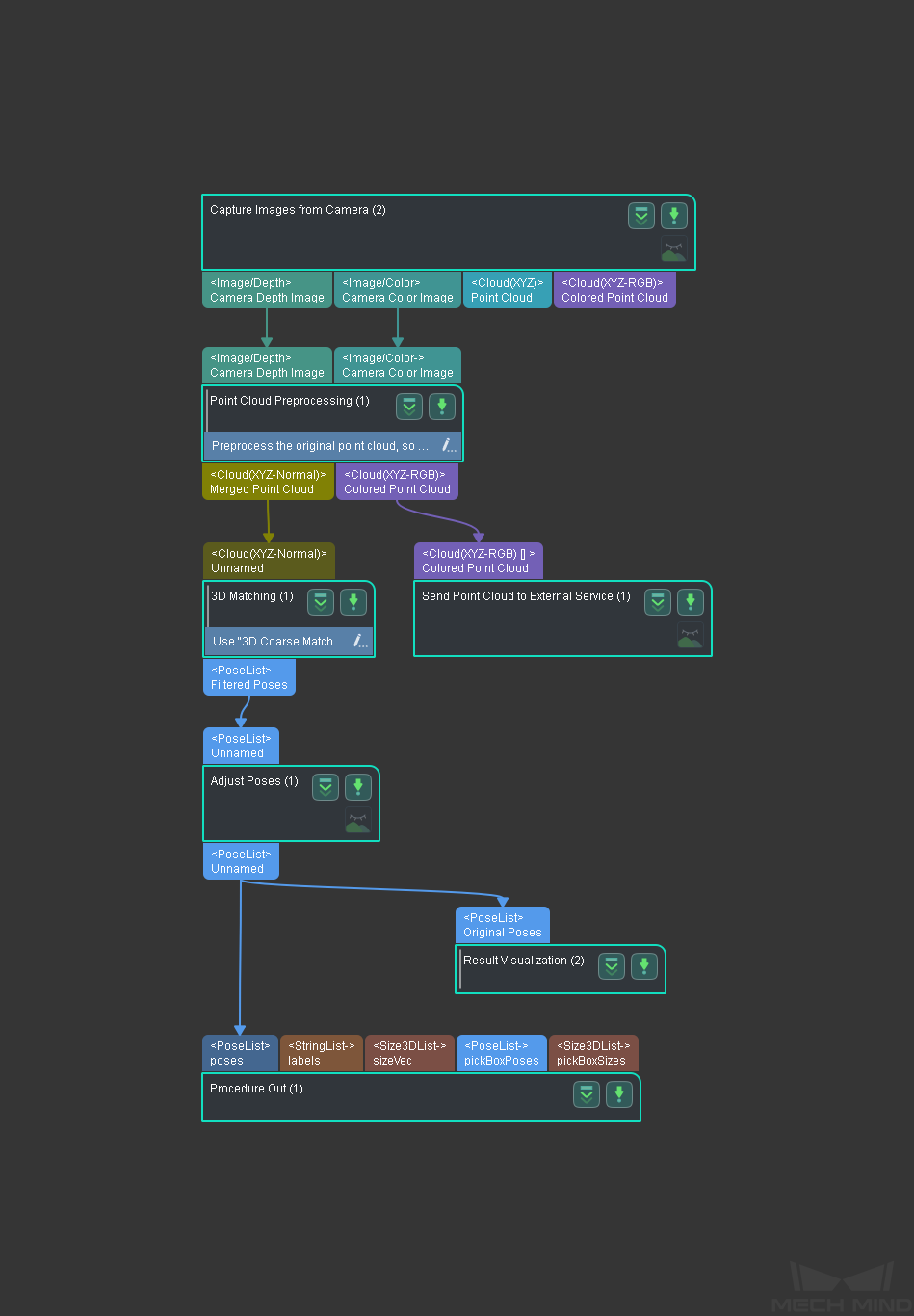
The project screenshot is shown below.
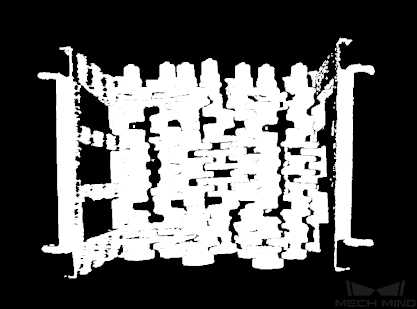
Point Cloud Preprocessing¶
This Procedure generates raw point clouds from the depth map and the color image, and then calclulate the normals of the point cloud, deletes the outliers, and then set an ROI. It facilitates the matching in subsequent Steps.
Please refer to Point Cloud Preprocessing for detailed information about this Procedure.
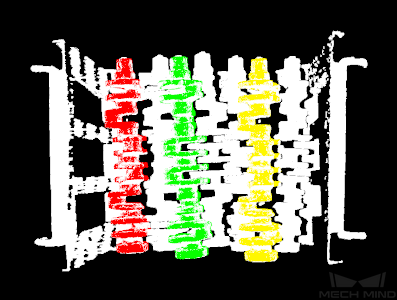
3D Matching¶
After filtering the point cloud, this Procedure is used to match the workpiece point cloud with the point cloud model, and then output the pick points. The matching result is shown in the figure below. Please refer to 3D Matching for detailed information about this Procedure.
Adjust Poses¶
Once the pick points are determined, the software will convert the reference frame of the pick points, sort the pick points, and map them to multiple pick points. Please refer to Adjust Poses for detailed information.