Point Axes of Poses to Given Direction¶
Function¶
Adjust the orientations of axes of poses by a set reference direction.
Usage Scenario¶
For various scenarios where pose orientations need to be adjusted.
This Step is outdated. If you need to rotate poses by object symmetricity (that is, to set the parameter Rectification Method of this Step to ROTATION), please use the new Step Rotate Poses’ Axes to Specified Directions under Symmetry Constraints together with Step Easy Create Vector3Ds.
Input and Output¶
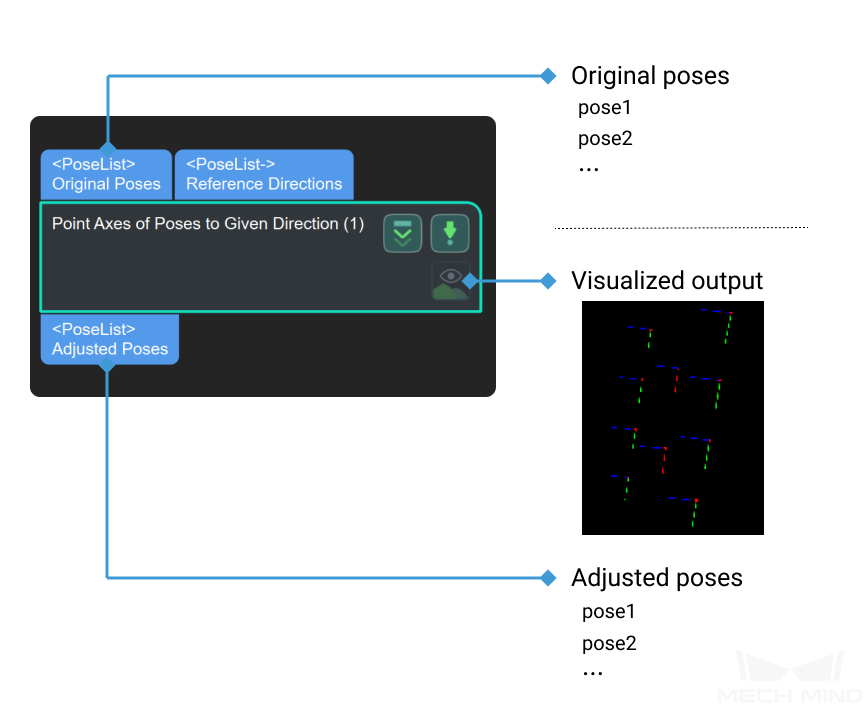
Parameters¶
Visualization Settings
- Pose Type to Visualize
- Default setting: AfterList of options: After, Before, AllInstruction: This parameter decides the type of pose to visualize, including pose after processing, pose before processing, and poses before and after processing.
Method Selection
- Rectification Method
- HARD_RECTIFY: The default value. If there exist a second input (reference pose), and useFirstRefPose is selected, the reference direction is the direction of the corresponding axis type of the first reference pose. Otherwise the reference direction will be the corresponding axis type of all reference poses. If there isn’t a second input (reference pose), “reference Dir” will determine the reference direction.ROTATION: Set the symmetrical angle according to the symmetry of the object, so that the rotation axis to be adjusted will be roughly in the same direction with the specified reference axis.
Axis Settings
- Axis to Be Adjusted
- Instruction: the rotation axis that needs adjustment.Lise of option: X, Y, Z (default setting)
Reference Direction
- X-axis
- Default value: 0Instruction: The direction vector of the reference axis X.
- Y-axis
- Default value: 0Instruction: The direction vector of reference axis Y.
- Z-axis
- Default value: 1Instruction: The direction vector of the reference axis Z.