Aspectos destacados de la versión
-
Nuevos grupos de parámetros integrados, adecuados para diversos escenarios u objetos de trabajo, simplifican el proceso del ajuste de parámetros.
-
Mejora de interfaz y función de Asistente de Exposición 3D, proporciona mejor resultado de cálculo de una sola exposición.
Mech-Eye Viewer
Nuevas Funciones
Nuevos Grupos de Parámetros Integrados
Al actualizar el firmware de la cámara V4 a la versión 2.2.0, se integrarán nuevos grupos de parámetros adecuados para diversos escenarios u objetos de trabajo. Una vez seleccionados los grupos de parámetros correspondientes a los escenarios reales, realizar ajustes finos en el valor de parámetros puede contribuir a obtener datos cuya calidad cumpla los requisitos, simplificando así el proceso de ajuste de los parámetros.
Compatible con el Idioma Español
Mech-Eye Viewer 2.2.0 ofrece compatibilidad con el idioma español. Puede cambiar el idioma en Opciones en el menú Ayuda.
Acceso Fácil a la Comunidad en Línea de Mech-Mind
En el menú Ayuda se ha incorporado la opción de Comunidad en Línea en Mech-Eye Viewer 2.2.0, haga clic en la opción para abrir la Comunidad en Línea de Mech-Mind.
La comunidad proporciona descargas correspondientes y experiencias compartidas relevantes a los productos. Puede publicar su pregunta y duda en la comunidad cuando tenga problemas.
En Nube de Puntos se Visualizan las Características de Superficie del Objeto y Variaciones del Profundidad
En el menú Color, ubicado a la izquierda del visor de nube de puntos, se ha incorporado la opción de Jet + intensidad. La información de intensidad de la superficie del objeto se superpone en el esquema de color jet. Adecuado para revisar las características de la superficie del objeto y las variaciones de profundidad al mismo tiempo.
Mejoras de Función
Mejora de Interfaz y Función de Asistente de Exposición 3D
En Mech-Eye Viewer 2.2.0, se ha cambiado el Asistente de Exposición a Asistente de Exposición 3D y mejorado la interfaz y función.
Ahora, el Asistente de Exposición 3D puede calcular y aplicar el tiempo de exposición adecuado según la ROI establecida al parámetro de Tiempo de Exposición en la categoría de Parámetros 3D. Mediante esta herramienta, es posible simplificar el proceso del ajuste de parámetros y mejorar la calidad del mapa de profundidad y la nube de puntos de manera más conveniente.
Revisión de la Dirección IP antes de la Conexión
En Mech-Eye Viewer 2.2.0, se revisa automáticamente la dirección IP de la cámara antes de la conexión, lo cual puede contribuir a detectar problemas que podrían impedir la conexión.
Al abrir Mech-Eye Viewer, se revisa automáticamente los siguientes problemas. En las tarjetas de información de cámaras con problemas, aparece el icono ![]() .
.
-
Si la dirección IP de la cámara y la del puerto de Ethernet conectado a la cámara de la computadora están en la misma subred.
-
Si varias cámaras tienen la misma dirección IP.
Mejora del Proceso de Actualización del Firmware y Software
En Mech-Eye Viewer 2.2.0, se ha mejorado el proceso de actualización del firmware y software, brindando así una mejora experiencia al usuario.
-
Si es necesario actualizar el firmware o software, en la tarjeta de información de la cámara se muestra el botón Actualizar. Haga clic en el botón para realizar la actualización.
-
Si es necesario actualizar el software, al hacer clic en el botón Actualizar, se mostrará un enlace de descarga de Mech-Eye SDK, lo cual le ayuda a visitar el centro de descargas de Mech-Mind para obtener la última versión del software.
Mejora de la Función de Guardar Datos
En Mech-Eye Viewer 2.2.0, se han mejorado los siguientes aspectos de Guardar datos:
-
Se ha ajustado el orden de las opciones en la interfaz para corresponder al orden real de selección.
-
Al guardar la nube de puntos, puede seleccionar la opción de guardarla organizada o desorganizada en el menú Organización.
-
Puede guardar nube de puntos en formato CSV. Los archivos de nubes de puntos en formato CSV son más pequeños, y se pueden procesar y analizar fácilmente mediante Microsoft Excel o los lenguajes de programación.
-
Al guardar nubes de puntos en formato PLY y PCD, puede seleccionar el color de nube de puntos por guardar en el menú Color. Las opciones proporcionadas se corresponden al menú Color ubicado a la izquierda del visor de nube de puntos.
-
Cambie la opción anterior Usar los últimos datos obtenidos a Adquirir y guardar datos nuevos, seleccione cuando desee adquirir datos de nuevo y guardarlos.
Mejora de la Calidad de Nube de Puntos de Cámaras Láser
En Mech-Eye Viewer 2.2.0, se ha mejorado la calidad de nube de puntos obtenidas con los siguientes ajustes de parámetro para las cámaras láser:
-
Todas las cámaras láser: ajusta el parámetro Número de Porción de Fotograma Láser a un valor mayor que 1
-
Deep (V3) y Pro L Enhanced (V3): ajusta Modo de Selección de Proyector a EnableAll
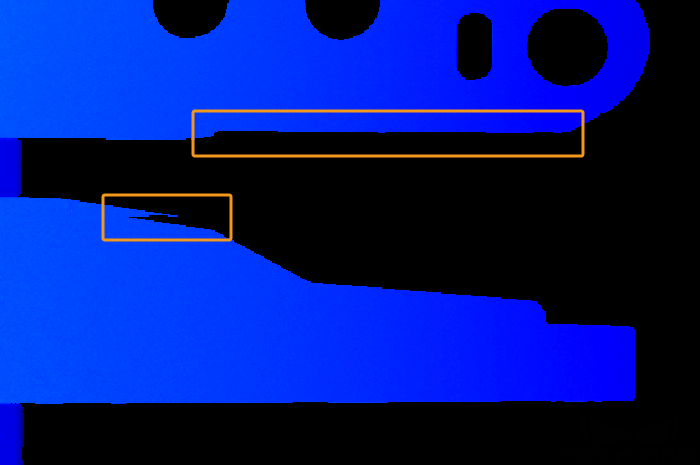
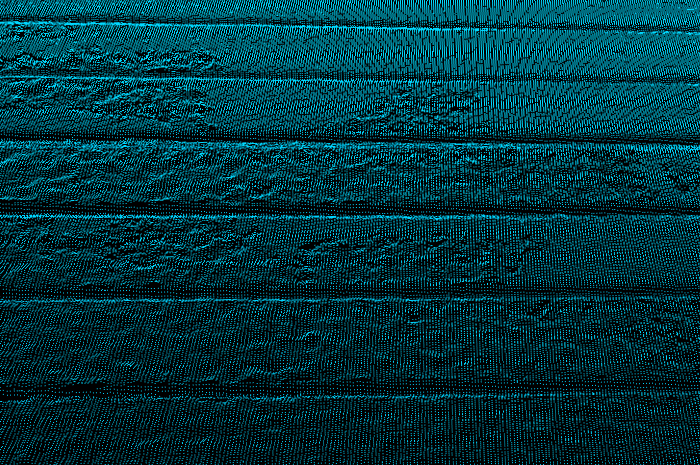
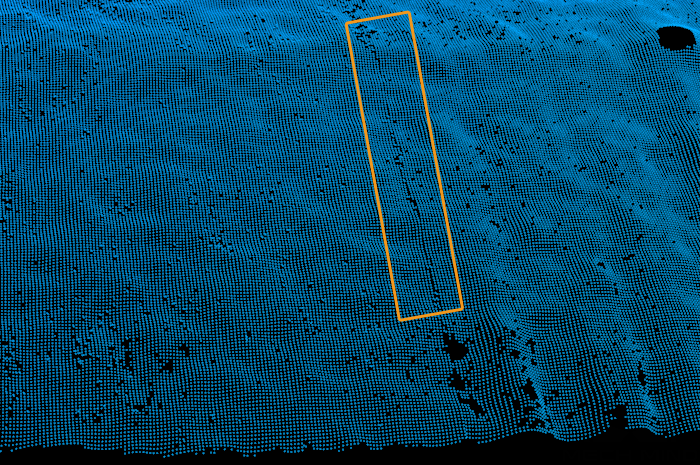
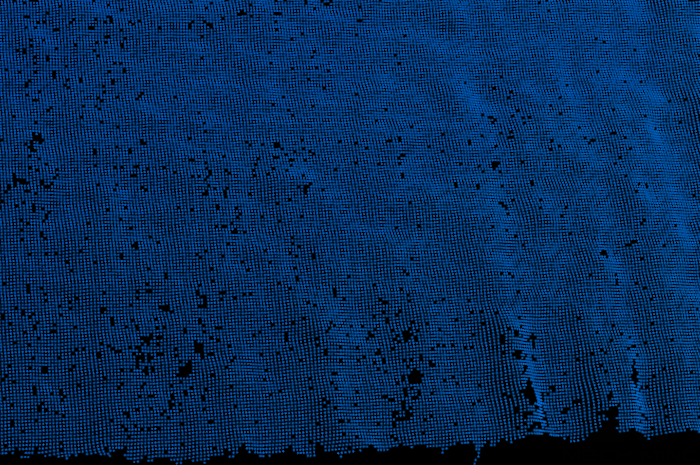
Al usar las cámaras y ajustes de parámetro mencionados. los problemas frecuentes de calidad de la nube de puntos se reducen notablemente en la versión 2.2.0:
| Preguntas Frecuentes | Antes de 2.2.0 | 2.2.0 |
|---|---|---|
Ausencia de borde del objeto |
|
|
Gran fluctuación de profundidad |
|
|
Huecos entre las uniones |
|
|


Mejora de los Textos en la Interfaz de Calculadora de FOV
En Mech-Eye Viewer 2.2.0, se han actualizado los siguientes textos en la interfaz de Calculadora de FOV, facilitando así el entendimiento:
-
Se han cambiado Altura de FOV y Anchura de FOV a Anchura de FOV y Longitud de FOV.
-
Se han cambiado las letras que representan la Longitud de FOV, Anchura de FOV y Distancia de trabajo a L, W y H.
Problemas Resueltos
En Mech-Eye Viewer 2.2.0, se han resuelto los siguientes problemas:
-
No se puede abrir Mech-Eye Viewer hasta que cambie manualmente el ajuste de Permitir que una aplicación o una característica a través de Firewall de Windows Defender.
-
Al usar la Asistencia remota de Windows para conectar la computadora y abrir Mech-Eye Viewer, Mech-Eye Viewer se bloquea.
-
Se puede ajustar una máscara de subred inválida mediante Mech-Eye Viewer, causando que no se pueda encontrar la cámara.
-
En el Analizador de Profundidad, puntos que no tienen valores de profundidad en la línea dibujada muestran valores de profundidad en la ilustración derecha.
-
Al hacer clic en el botón Reproducir sin haber obtenido previamente una nube de puntos válida, la visualización de la nube de puntos se vuelve anormal al obtener una válida.
-
PRO S(V4) y PRO M (V4): El protector no se puede emitir luz ocasionalmente y no se recupera.
-
Laser L Enhanced (V3), LSR S (V4) y LSR L (V4): Al ajustar el parámetro Modo de Exposición/Modo de Exposición de Imagen 2D (Textura) en la categoría de Parámetros 2D a HDR, la cámara ocasionalmente se desconecta y reinicia de forma automática.
Mech-Eye API
Mech-Eye API 2.2.0 se ha reestructurado para proporcionar una estructura más clara, manteniendo al mismo tiempo todas las funciones disponibles en versiones anteriores y ofreciendo nuevas funciones.
|
Nuevas Funciones
Nuevos Grupos de Parámetros Integrados
Al actualizar el firmware de la cámara V4 a la versión 2.2.0, se integrarán nuevos grupos de parámetros adecuados para diversos escenarios u objetos de trabajo. Una vez seleccionados los grupos de parámetros correspondientes a los escenarios reales, realizar ajustes finos en el valor de parámetros puede contribuir a obtener datos cuya calidad cumpla los requisitos, simplificando así el proceso de ajuste de los parámetros.
Cálculo de Normales de Nube de Puntos
Llamar a los nuevos métodos puede obtener datos 3D que incluyen normales, lo que reduce la cantidad de datos por procesar posteriormente.
| Si desea usar esta nueva función, modifique el programa cliente según el Asistente de migración para usar la versión 2.2.0 de Mech-Eye API. |
-
Obtener nube de puntos sin textura con normales:
-
C++
-
C#
-
Python
mmind::eye::Frame3D frame3D; camera.capture3DWithNormal(frame3D); PointCloudWithNormals pointCloud = frame3D.getUntexturedPointCloudWithNormals();var frame3D = new Frame3D(); camera.Capture3DWithNormal(ref frame3D); var pointCloud = frame3D.GetUntexturedPointCloudWithNormals();frame_3d = Frame3D() camera.capture_3d_with_normal(frame_3d) point_cloud = frame_3d.get_untextured_point_cloud_with_normals() -
-
Obtener nube de puntos con textura con normales:
-
C++
-
C#
-
Python
mmind::eye::Frame2DAnd3D frame2DAnd3D; camera.capture2DAnd3DWithNormal(frame2DAnd3D); TexturedPointCloudWithNormals pointCloud = frame2DAnd3D.getTexturedPointCloudWithNormals();var frame2DAnd3D = new Frame2DAnd3D(); camera.Capture2DAnd3DWithNormal(ref frame2DAnd3D); var pointCloud = frame2DAnd3D.GetTexturedPointCloudWithNormals();frame_2d_and_3d = Frame2DAnd3D() camera.capture_2d_and_3d_with_normal(frame_2d_and_3d) point_cloud = frame_2d_and_3d.get_textured_point_cloud_with_normals() -
Revisión del Estado de Conexión de Cámara
El nuevo mecanismo Heartbeak se puede usar para detectar desconexiones de la cámara.
| Si desea usar esta nueva función, modifique el programa cliente según el Asistente de migración para usar la versión 2.2.0 de Mech-Eye API. |
-
Ajuste el intervalo de señales de Heartbeak usando el siguiente método:
-
C++
-
C#
-
Python
camera.setHeartbeatInterval(1000);camera.SetHeartbeatInterval(1000);camera.set_heartbeat_interval(1000) -
-
Registre la llamada de función usando el siguiente método, que ayuda a detectar situaciones de desconexión de la cámara y apunta el error correspondiente:
-
C++
-
C#
-
Python
mmind::eye::CameraEvent::EventCallback callback = [](mmind::eye::CameraEvent::Event event, void* pUser) { std::cout << "A camera event has occurred. The event ID is " << event << "." << std::endl; }; mmind::eye::CameraEvent::registerCameraEventCallback(camera, callback, nullptr, mmind::eye::CameraEvent::CAMERA_EVENT_DISCONNECTED);private static void CallbackFunc(CameraEvent.Event cameraEvent, IntPtr pUser) { Console.WriteLine("A camera event has occurred. The event ID is {0}.", cameraEvent); } Utils.ShowError(CameraEvent.RegisterCameraEventCallback(ref camera, CallbackFunc, IntPtr.Zero, (uint)CameraEvent.Event.CAMERA_EVENT_DISCONNECTED));class CustomCallback(EventCallbackBase): def __init__(self): super().__init__() def run(self, event): print("A camera event has occurred. The event ID is {0}.".format(event)) camera_event = CameraEvent() callback = CustomCallback() show_error(camera_event.register_camera_event_callback(camera, callback, CameraEvent.CAMERA_EVENT_ALL)) -
Nuevos Métodos para Guardar Nube de Puntos
Llamando a los nuevos métodos para guardar las nubes de puntos en formato PLY, PCD y CSV, sin depender de ninguna biblioteca de software de terceros.
| Si desea usar esta nueva función, modifique el programa cliente según el Asistente de migración para usar la versión 2.2.0 de Mech-Eye API. |
-
Guardar nube de puntos sin textura:
-
C++
-
C#
-
Python
mmind::eye::Frame3D frame3D; camera.capture3D(frame3D); frame3D.saveUntexturedPointCloud(mmind::eye::FileFormat::PLY, "PointCloud.ply");var frame3D = new frame3D(); camera.Capture3D(ref frame3D); frame3D.SaveUntexturedPointCloud(FileFormat.PLY, "PointCloud.ply");frame_3d = Frame3D() camera.capture_3d(frame_3d) frame_3d.save_untextured_point_cloud(FileFormat_PLY, "PointCloud.ply") -
-
Guardar nube de puntos con textura:
-
C++
-
C#
-
Python
mmind::eye::Frame2DAnd3D frame2DAnd3D; camera.capture2DAnd3D(frame2DAnd3D); frame2DAnd3D.saveTexturedPointCloud(mmind::eye::FileFormat::PLY, "TexturedPointCloud.ply");var frame2DAnd3D = new Frame2DAnd3D(); camera.Capture2DAnd3D(ref frame2DAnd3D); frame2DAnd3D.SaveTexturedPointCloud(FileFormat.PLY, "TexturedPointCloud.ply");frame_2d_and_3d = Frame2DAnd3D() camera.capture_2d_and_3d(frame_2d_and_3d) frame_2d_and_3d.save_textured_point_cloud(FileFormat_PLY, "TexturedPointCloud.ply") -
Nueva Herramienta de Configuración de IP
En la versión 2.2.0, se ha incorporado una herramienta de configuración de IP que incluye todas las funciones relevantes proporcionadas en Mech-Eye Viewer en formato de archivo ejecutable. Con esta herramienta, puede completar la configuración de IP de la cámara en el sistema Ubuntu.
Proporciona Ejemplos de LabView y VisionPro
Mediante C# Mech-Eye API, puede conectar y controlar la cámara en LabView y VisionPro. Se puede descargar los ejemplos correspondientes en GitHub.
|
Se han probado las siguientes versiones:
|
Mejoras de Función
Mejora de la Calidad de Nube de Puntos de Cámaras Láser
En Mech-Eye Viewer 2.2.0, se ha mejorado la calidad de nube de puntos obtenidas con los siguientes ajustes de parámetro para las cámaras láser:
-
Todas las cámaras láser: ajusta el parámetro Número de Porción de Fotograma Láser a un valor mayor que 1
-
Deep (V3) y Pro L Enhanced (V3): ajusta Modo de Selección de Proyector a EnableAll
Al usar las cámaras y ajustes de parámetro mencionados. los problemas frecuentes de calidad de la nube de puntos se reducen notablemente en la versión 2.2.0:
| Preguntas Frecuentes | Antes de 2.2.0 | 2.2.0 |
|---|---|---|
Ausencia de borde del objeto |
|
|
Gran fluctuación de profundidad |
|
|
Huecos entre las uniones |
|
|
Problemas Resueltos
-
PRO S(V4) y PRO M (V4): El protector no se puede emitir luz ocasionalmente y no se recupera.
-
Laser L Enhanced (V3), LSR S (V4) y LSR L (V4): Al ajustar el parámetro Modo de Exposición/Modo de Exposición de Imagen 2D (Textura) en la categoría de Parámetros 2D a HDR, la cámara ocasionalmente se desconecta y reinicia de forma automática.
Interfaz de GenICam
Nuevas Funciones
Nuevos Grupos de Parámetros Integrados
Al actualizar el firmware de la cámara V4 a la versión 2.2.0, se integrarán nuevos grupos de parámetros adecuados para diversos escenarios u objetos de trabajo. Una vez seleccionados los grupos de parámetros correspondientes a los escenarios reales, realizar ajustes finos en el valor de parámetros puede contribuir a obtener datos cuya calidad cumpla los requisitos, simplificando así el proceso de ajuste de los parámetros.
Nueva Herramienta de Configuración de IP
En la versión 2.2.0, se ha incorporado una herramienta de configuración de IP que incluye todas las funciones relevantes proporcionadas en Mech-Eye Viewer en formato de archivo ejecutable. Con esta herramienta, puede completar la configuración de IP de la cámara en el sistema Ubuntu.
Mejoras de Función
Mejora de la Calidad de Nube de Puntos de Cámaras Láser
En Mech-Eye Viewer 2.2.0, se ha mejorado la calidad de nube de puntos obtenidas con los siguientes ajustes de parámetro para las cámaras láser:
-
Todas las cámaras láser: ajusta el parámetro Número de Porción de Fotograma Láser a un valor mayor que 1
-
Deep (V3) y Pro L Enhanced (V3): ajusta Modo de Selección de Proyector a EnableAll
Al usar las cámaras y ajustes de parámetro mencionados. los problemas frecuentes de calidad de la nube de puntos se reducen notablemente en la versión 2.2.0:
| Preguntas Frecuentes | Antes de 2.2.0 | 2.2.0 |
|---|---|---|
Ausencia de borde del objeto |
|
|
Gran fluctuación de profundidad |
|
|
Huecos entre las uniones |
|
|
Problemas Resueltos
-
Si el cliente de GenICam se presenta un problema y se cierra mientras está conectado a una cámara, la cámara puede no ser capaz de reconectarse de manera normal después.
-
PRO S(V4) y PRO M (V4): El protector no se puede emitir luz ocasionalmente y no se recupera.
-
Laser L Enhanced (V3), LSR S (V4) y LSR L (V4): Al ajustar el parámetro Modo de Exposición/Modo de Exposición de Imagen 2D (Textura) en la categoría de Parámetros 2D a HDR, la cámara ocasionalmente se desconecta y reinicia de forma automática.