HALCON: Conectar la Cámara, Capturar Imágenes, y Ajustar los Parámetros
Este capítulo describe cómo conectar la Cámara Industrial 3D de Mech-Eye, ajustar parámetros y capturar imágenes mediante el asistente de HALCON y el programa de ejemplo proporcionado por Mech-Mind.
Condiciones Previas
| Para las series de Nano (V3) y Pro XS (V3), se recomienda conectar directamente la cámara a la computadora, sin usar un conmutador. |
-
Se ha instalado HALCON 20.11 o superior en la computadora.
| Las versiones de HALCON anteriores a 20.11 no están completamente probadas. |
-
Se ha instalado Mech-Eye SDK 2.0.0 o superior en la computadora.
| Para usar Mech-Eye SDK, la versión de firmware de la cámara debe coincidir con la del software. Para actualizar la versión de firmware, consulte la sección Actualizar el firmware de cámara. |
-
Las direcciones IP de la cámara y la computadora están en la misma subred.
| Se recomienda ajustar las direcciones IP de la cámara y la computadora a direcciones IP estáticas. Para obtener instrucciones sobre el ajuste de la dirección IP, consulte la sección Ajustar la Dirección IP de la Cámara mediante Mech-Eye Viewer. |
En HDevelop, puede conectar la cámara mediante asistentes de HALCON o el programa de ejemplo proporcionado por Mech-Mind.
Usar el Asistente de Adquisición de Imágenes
Mediante el asistente de adquisición de imágenes, puede conectar la cámara, capturar imágenes y ajustar los parámetros.
Para abrir el asistente de adquisición de imágenes, abra HDevelop y seleccione .
Conectar la Cámara
-
En la ficha de Fuente de la ventana de Image Acquisition, marque Interfaz de adquisición de Imagen y seleccione GigEVision2 en el menú desplegable.
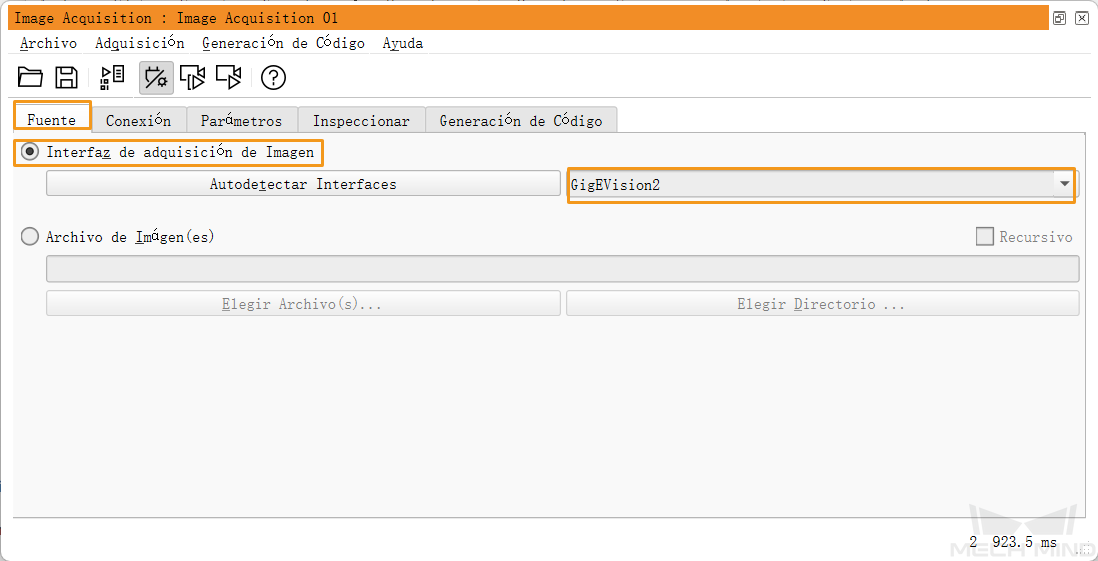
Si la opción de GigEVision2 no está disponible en el menú desplegable, eso se debe a que no se ha instalado la interfaz de adquisición de imagen de GigEVision2. Consulte el Manual de Instalación de HALCON e instale la interfaz mediante el Administrador de Software MVTec (SOM). -
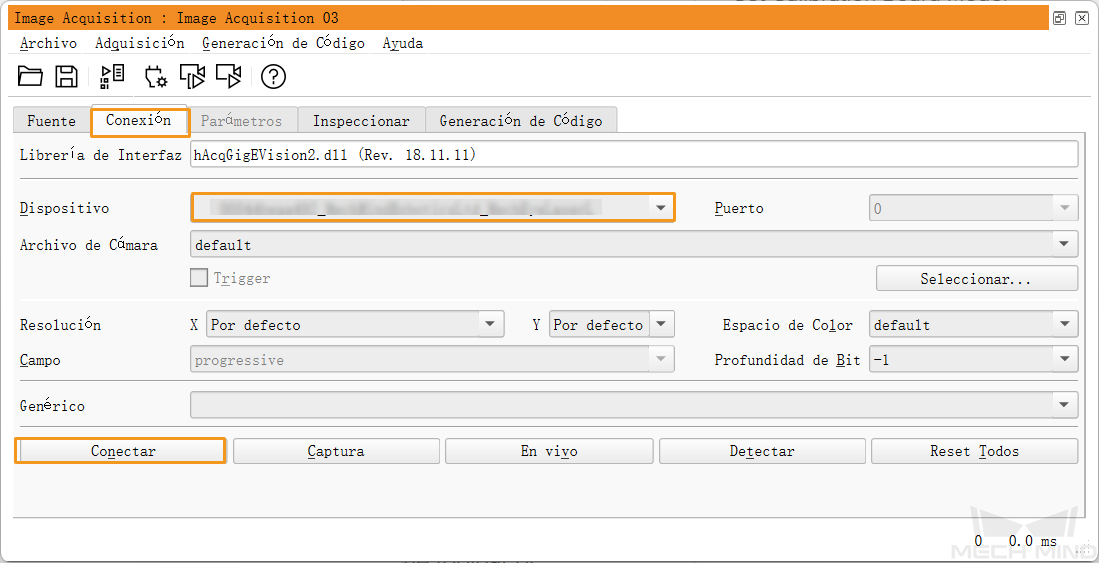
En la ficha de Conexión, en el menú desplegable de Dispositivo, seleccione el dispositivo que desea conectar, y luego, haga clic en el botón Conectar para conectar la cámara.
|
Capturar Imágenes
Después de conectar la cámara, en la ficha de Conexión, haga clic en el botón Captura para realizar una captura de imágenes.
|
Si la cámara tarda mucho en capturar imágenes, puede aumentar el valor de MTU y activar la trama Jumbo en la computadora. |
Para realizar varias capturas o realizar las capturas de forma continua, es necesario ajustar el parámetro AcquisitionMode primero.
-
Instrucciones para realizar varias capturas de imágenes:
-
Seleccione la ficha de Parámetros y ajuste el parámetro AcquisitionMode a MultiFrame.
-
Haga clic en el botón Refrescar ubicado en la parte superior derecha , y ajuste el número imágenes por capturar en AcquisitionFrameCount.
-
Seleccione la ficha de Conexión, y haga clic en el botón En vivo para realizar capturas de imágenes.
-
Una vez que se ha capturado el número predeterminado de imágenes, el botón En vivo se cambia al Stop. Haga clic en el botón Stop para terminar la captura de imágenes.
-
-
Instrucciones para realizar capturas de imágenes de forma continua:
-
Seleccione la ficha de Parámetros y ajuste el parámetro AcquisitionMode a Continuous.
-
Seleccione la ficha de Conexión, y haga clic en el botón En vivo para realizar capturas de imágenes.
-
El botón En vivo se cambia al Stop. Haga clic en el botón Stop para terminar la captura de imágenes.
-
|
Seleccionar el Tipo de Datos
Después de conectar la cámara, el tipo predeterminado de datos adquiridos es la imagen 2D. Puede seleccionar el tipo de datos (imagen 2D o mapa de profundidad) mediante ajustar el parámetro DeviceScanType.
-
Haga clic en la ficha de Parámetros, y ajuste el parámetro DeviceScanType al tipo de datos que desea. Abajo está la descripción sobre el tipo de datos:
Valor Tipo de Datos Areascan
Imagen 2D
Areascan3D
Mapa de profundidad (una imagen 2D con la información de profundidad)
-
Realice una captura para obtener el tipo de datos seleccionado.
Si se ha marcado Refrescar Imagen ubicado en la parte superior derecha en la ficha de Parámetros, y las imágenes en el visor de Canvas se actualizarán automáticamente.
Ajustar la Región de Captura
Después de conectar la cámara, si desea recortar la imagen obtenida, puede ajustar la región de captura mediante los parámetros de Height, Width, OffsetX y OffsetY.
Siga los siguientes pasos para ajustar la región de captura:
-
Seleccione el tipo de datos para ajustar una región de captura.
-
Haga clic en el botón Capturar para realizar la captura de una vez, y revise la imagen actual.
-
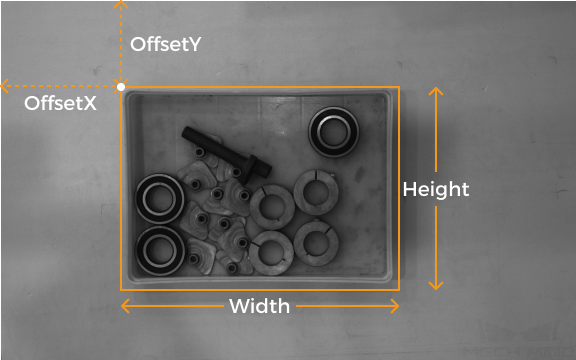
Cambie a la ficha de Parámetros y ajuste los parámetros de Height, Width, OffsetX y OffsetY. La siguiente figura muestra la relación entre los cuatro parámetros, la región de captura establecida (caja de color naranja) y la imagen original.
-
Width: la anchura de la región de captura
-
Height: la altura de la región de captura
-
OffsetX: la coordenada x de la esquina superior izquierda de la región de captura (la coordenada de dicha esquina de la imagen original es (0,0))
-
OffsetY: la coordenada y de la esquina superior izquierda de la región de captura
Los cuatros parámetros mencionados deben cumplir los siguientes requisitos:
-
(Width + OffsetX) no se puede exceder la anchura de la imagen original
-
(Height + OffsetY) no se puede exceder la altura de la imagen original
La anchura y altura de la imagen original se visualizan en WidthMax y HeightMax en la categoría de Parámetros de sólo lectura (es necesario ajustar el nivel de visibilidad a Experto o superior).
-
-
-
Realice otra vez la captura de imagen para revisar el resultado de recorte.
| Si se ha marcado Refrescar Imagen ubicado en la parte superior derecha en la ficha de Parámetros, y las imágenes en el visor de Canvas se actualizarán automáticamente. |
-
Cambie a la ficha de Generación de Código, haga clic en el botón Insertar Código para generar el código correspondiente.
-
Si desea ajustar una región de captura para otro tipo de datos:
-
Desconecte la cámara en el actual asistente de adquisición de imágenes.
-
Abra un nuevo asistente de adquisición de imágenes y conecte la cámara.
-
Seleccione el otro tipo de datos y rehaga los pasos mencionados.
-
|
Comparación entre la Región de Captura y Scan3DROI
La Cámara Industrial 3D de Mech-Eye proporciona otro grupo de parámetros para ajustar la ROI: Scan3DROILeft, Scan3DROITop, Scan3DROIHeight y Scan3DROIWidth (denominados colectivamente "Scan3DROI").
Abajo se resumen las diferencias entre los parámetro de región de captura y los de Scan3DROI. Seleccione los parámetro según su demanda.
| Región de captura | Scan3DROI |
|---|---|
No se guarda en los grupos de parámetros, los valores se restablecen si la cámara se apaga |
Se puede guardar en los grupos de parámetros |
Aplicable para imagen 2D y mapa de profundidad |
No aplicable para imagen 2D |
Recortar las imágenes |
No recortar las imágenes |
Solo se puede ajustar en HDevelop |
Se puede ajustar mediante las herramientas de visualización de Mech-Eye Viewer |
Ajustar los Parámetros
Si la calidad de los datos obtenidos no es satisfactoria, puede ajustar los parámetros de cámara en la ficha de Parámetros.
|
Siga los siguientes pasos para ajustar los parámetros:
-
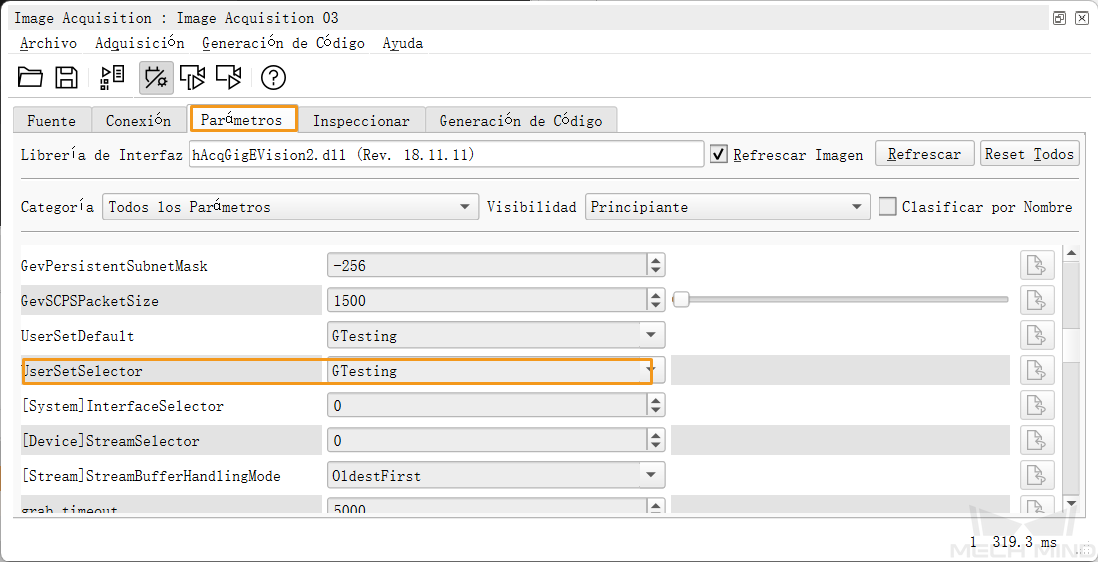
Después de conectar la cámara, haga clic en la ficha de Parámetros, y cambie el parámetro UserSetSelector al grupo de parámetros por modificar.
-
Localice parámetro UserSetLoad, y haga clic en el botón Aplicar ubicada a la derecha para leer la configuración.
Si los valores de parámetros no se actualizan después de hacer clic en el botón Aplicar, haga clic de nuevo.
-
Localice el parámetro y modifique su valor.
-
Localice el parámetro UserSetSave, y haga clic en el botón Aplicar ubicada a la derecha para guardar la configuración.
-
Cambie a la ficha de Generación de Código, haga clic en el botón Insertar Código para generar el código correspondiente.
Referencia
-
Los parámetros de la cámara compatibles con GenICam coinciden prácticamente con los que proporcionan Mech-Eye Viewer. Para obtener la coincidencia de los parámetros y las descripciones y explicaciones sobre los parámetros de la cámara compatibles con GenICam, consulte la sección Descripción de Parámetros Compatibles Con GenICam.
-
Al ajustar los parámetros como ROI de Auto-Exposición, Rango de Profundidad y ROI, normalmente se requieren herramientas de visualización de datos para obtener valores óptimos mediante una serie de ajustes. Debido a que HALCON no proporciona herramientas de visualización, puede ajustar dichos parámetros mediante las herramientas de Mech-Eye Viewer. Para obtener instrucciones más detalladas, consulte la sección Usar Mech-Eye Viewer para Ajustar Parámetros de Cámara para el cliente de GenICam.
| Antes de conectar la cámara en Mech-Eye Viewer, es necesario desconectar la cámara de HALCON. Si fracasa en conectar la cámara en Mech-Eye Viewer, cierre HDevelop e intente de nuevo. |
Usar el Programa de Ejemplo de HALCON
En GitHub se proporciona una serie de programas de ejemplo de HALCON. Esta sección describe cómo usar el programa de ejemplo de connect_to_camera_and_capture_images para conectar la cámara, capturar imágenes y ajustar los parámetros. Puede ejecutar directamente el programa o modificarlo según su demanda.
|
El programa de ejemplo de HALCON se escribe en C++, que se puede ejecutar directamente en el entorno de desarrollo integrado de HDevelop. |
Ejecutar el Programa de Ejemplo
Siga los siguientes pasos para ejecutar el programa de ejemplo:
-
Haga clic en para programa de ejemplo de connect_to_camera_and_capture_imagesdescargar el .
-
Abra el programa de ejemplo en HALCON: abra HDevelop y arrastre el programa de ejemplo a la ventana de HALCON.
-
Seleccione la línea que contiene el operador de info_framegrabber en la Ventana del Programa, y haga clic en
 ubicado en Herramientas o presione F6 en el teclado para ejecutar el operador.
ubicado en Herramientas o presione F6 en el teclado para ejecutar el operador. -
Haga doble clic en DeviceInfos ubicado en el área de Variables de Control para visualizar todas las cámaras disponibles.

-
Haga doble clic en la cámara que desea conectar, y copie el nombre de cámara tras unique_name: o user_name:.

El user_name es el nombre personalizado de cámara. Puede personalizar el nombre de la cámara en Mech-Eye Viewer. -
Localice la línea de comandos abajo y sustituya MechEye por unique_name o user_name.
DeviceInfo := 'MechEye' -
Haga clic en
 ubicado en Herramientas o presione F5 en el teclado para ejecutar el programa de ejemplo.
ubicado en Herramientas o presione F5 en el teclado para ejecutar el programa de ejemplo. -
Si el programa ejecuta con éxito, puede ver la imagen 2D y los datos de nube de puntos obtenidos en la carpeta donde se encuentra el programa de ejemplo. Los nombres predeterminados de archivos son image2d.bmp y PointCloud.ply.
|
Ajustar los Parámetros
Si la calidad de los datos obtenidos no es satisfactoria, puede ajustar los parámetros de cámara en la ficha de Parámetros.
|
Siga los siguientes pasos para ajustar los parámetros:
-
Use el siguiente operador para obtener una lista de grupos disponibles de parámetros.
get_framegrabber_param (AcqHandle, 'UserSetSelector_values', ParameterValues) -
Haga doble clic en ParameterValues ubicado en el área de Variables de Control para visualizar nombres de todos los parámetros.
-
Use el siguiente operador para seleccionar el grupo de parámetros por modificar. UserSetSelector y UserSetLoad son parámetros de cámara que sirven para seleccionar y cargar un grupo de parámetros. Sustituya ParameterGroupName por el nombre actual del grupo de parámetros.
set_framegrabber_param (AcqHandle, 'UserSetSelector','ParameterGroupName') set_framegrabber_param (AcqHandle, 'UserSetLoad','ParameterGroupName') -
Use el siguiente operador para obtener el valor del parámetro especificado. Sustituya ParameterName por el nombre actual del parámetro de cámara. ParameterValues es la variable para guardar el valor de parámetro, puede modificar según su demanda. Tenga en cuenta que esta variable no se es necesario incluir en paréntesis.
get_framegrabber_param (AcqHandle, 'ParameterName', ParameterValues) -
Haga doble clic en ParameterValues ubicado en el área de Variables de Control para visualizar el valor de dicho parámetro.
-
Use el siguiente operador para ajustar el parámetro especificado. Sustituya ParameterName por el nombre actual del parámetro de cámara, y NewParameterValue al valor nuevo del parámetro.
set_framegrabber_param (AcqHandle, 'ParameterName', 'NewParameterValue') -
Use el siguiente operador para guardar las modificaciones de ajustes de parámetro en el grupo de parámetros. UserSetSave es parámetro de cámara para guardar los ajustes de parámetro en el grupo de parámetros. Sustituya ParameterGroupName por el nombre actual del grupo de parámetros.
set_framegrabber_param (AcqHandle, 'UserSetSave', 'ParameterGroupName')
Referencia
-
Los parámetros de la cámara compatibles con GenICam coinciden prácticamente con los que proporcionan Mech-Eye Viewer. Para obtener la coincidencia de los parámetros y las descripciones y explicaciones sobre los parámetros de la cámara compatibles con GenICam, consulte la sección Descripción de Parámetros Compatibles Con GenICam.
-
Al ajustar los parámetros como ROI de Auto-Exposición, Rango de Profundidad y ROI, normalmente se requieren herramientas de visualización de datos para obtener valores óptimos mediante una serie de ajustes. Debido a que HALCON no proporciona herramientas de visualización, puede ajustar dichos parámetros mediante las herramientas de Mech-Eye Viewer. Para obtener instrucciones más detalladas, consulte la sección Usar Mech-Eye Viewer para Ajustar Parámetros de Cámara para el cliente de GenICam.
Antes de conectar la cámara en Mech-Eye Viewer, es necesario desconectar la cámara de HALCON. Si fracasa en conectar la cámara en Mech-Eye Viewer, cierre HDevelop e intente de nuevo.