开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
本章将介绍安川机器人的基本操作。
以下操作以 P071 位置寄存器为例,设置 1 号工具。
注意
0 号工具的位姿数据必须全部为0,即 0 号工具位姿为法兰位姿,切勿改变 0 号工具位姿值。
在示教模式下时,选择具体程序后,依次点击 变量 ‣ 位置型(机器人)。
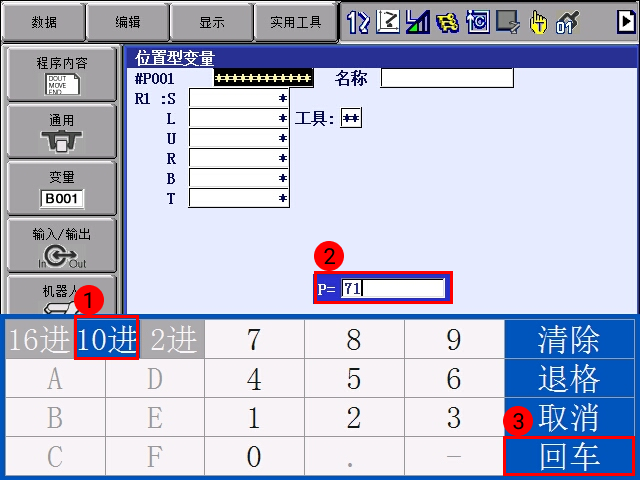
在位置型变量界面中,点击 进入指定页。
弹出键盘面板,选择 10进,然后输入 71 (P071位置寄存器),点击 回车。
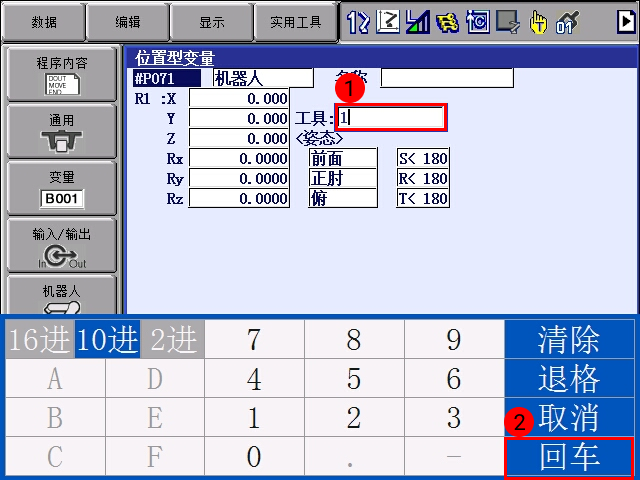
点击坐标系选择框,选择 机器人 坐标系。
点击 工具,弹出键盘面板,然后输入 1 (使用 1 号工具),点击 回车。
设置完成后的界面如下图所示。