Mech-Viz 1.7.0バージョンの更新説明¶
本節では、Mech-Viz 1.7.0 バージョンの新機能や機能の最適化、問題修復について説明します。
新機能¶
「ようこそページ」¶
ソフトウェアを起動・終了するとき、「ようこそページ」が表示されます。「ようこそページ」でプロジェクトを新規作成し、または最近使ったプロジェクトを開くことができます。
「リソース」パネル¶
Mech-Viz 1.7.0 では、「シーンの物体」と「ロボットハンドと対象物」パネルをなくし、プロジェクト構築に必要なリソースを設定・管理する機能は リソース パネルによって実現されます。
プロジェクトとロボット、座標系、ロボットハンド、対象物、地面、シーンの物体、モデルライブラリなどは、「リソース」パネルで設定できます。
プロジェクト:プロジェクト名、変更の有無、自動的に読み込むに設定されたかを表示します。
ロボット:現在のプロジェクトに使用するロボットの型番を表示します。
座標系:3D シミュレーションエリアに使用するすべての座標系を表示します。
ロボットハンド:ロボットハンドを作成、削除します。また、追加されたロボットハンドを設定します。
対象物:対象物を作成、削除します。また、追加された対象物を設定します。
地面:地面の高さを調整します。
シーンの物体:シーンの物体を作成、削除します。また、追加されたシーンの対象物を設定します。
モデルライブラリ:プロジェクトに使用するすべてのモデルを管理します。モデルを使用するために、まずモデルライブラリにインポートする必要があります。
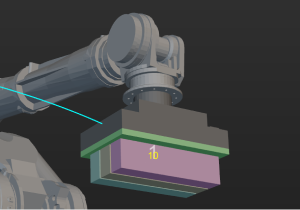
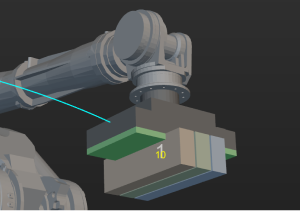
「現在のロボットハンドに設定」機能¶
新バージョンのソフトウェアには「現在のロボットハンド」概念を使用し、「現在のロボットハンド」に設定されたロボットハンドは次回のシミュレーション/実行に最初のロボットハンドとして使用されます。
非シミュレーション/実行状態で、リソースパネルでロボットハンド名を右クリックしてドロップダウンメニューで「現在のロボットハンドに設定」をクリックすると今使用するロボットハンドを変更します。
シミュレーション/実行状態で、「ロボットハンドを切り替え」ステップを使用して「現在のロボットハンド」を切り替えます。
「事前計画したパレットパターン」にパレットパターンの自動的生成機能¶
「事前計画したパレットパターン」ステップにより、パレットの寸法、箱の寸法、箱同士の間隔、箱の山の高さの制限に基づいて箱の数が最も多くて奇・偶数段の積み方が最も合理的で、段数が最も多いパレットパターンが自動的に生成されます。
その他¶
「ファイル」に「プロジェクトを新規作成」オプションを追加しました。
ROKAE SR3、SR4 ロボットモデルを追加しました。
複数のステップを選択してから、ショートカット Ctrl + G を押してそれらを「ステップの組み合わせ」に合成することが可能になりました。Ctrl + Shift + G を押して「ステップの組み合わせ」を分割することも可能になりました。
「メッセージによって異なる分岐を実行」に「待機タイムアウト」出口を追加しました。待機タイムアウト時間を設定すると、待機時間がタイムアウトになったら「待機タイムアウト」出口を実行します。
「混載パレットパターン」オフラインモードでは事前計算したパレットパターンの保存とインポートが可能になりました。
「混載パレットパターン」に箱の方向の指定が可能になりました。
「事前計画パレットパターン」に「風車形」積み付けを指定することが可能になりました。
「事前計画パレットパターン」に対象物の方向を指定することが可能になりました。
機能の最適化¶
ロボットモデルライブラリの拡充¶
オンラインロボットモデルライブラリにロボットモデルの数を 214 から 600 以上に増加しました。ABB、DENSO、FANUC、Kawasaki、KUKA、Mitsubishi、Nachi、UR、STAUBLI、YASKAWA など多数のロボットモデルが利用できます。また、ABB、FANUC、Kawasaki、KUKA、Nachi、UR、YASKAWA などのロボットモデルは、パラメータ校正が行われました。
STL 形式のロボットハンド衝突モデル非対応化¶
ロボットハンドと点群との衝突検出実行を改善するために、Mech-Viz 1.7.0 バージョンでは STL 形式のロボットハンド衝突モデルに対応しなくなります。新バージョンのソフトウェアがサポートするモデル形式については、リソースのモデル をお読みください。
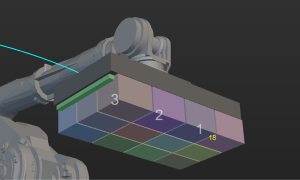
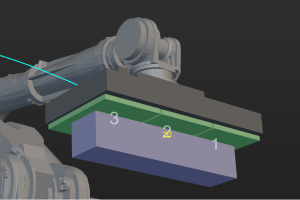
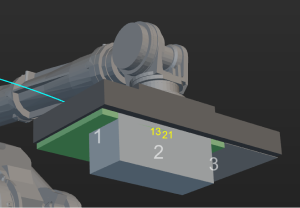
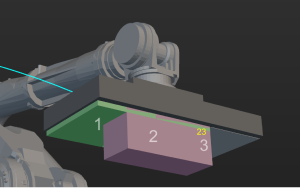
「ビジョン処理による移動」デパレタイジングのアルゴリズムの最適化¶
Mech-Viz 1.7.0 バージョンでは、「ビジョン処理による移動」のデパレタイジングのアルゴリズムを最適化し、以下の機能が可能になりました。
単一ブロック吸盤 |
|
複数ブロック吸盤 |
|
単一把持 |
|
行ごと把持 |
|
複数行把持 |
|
中心合わせ |
|
辺の中心合わせ |
|
コーナー合わせ |
|
吸盤の長辺が箱の組み合わせ長辺と平行 |
|
吸盤の長辺が箱の組み合わせ長辺と垂直 |
|
さらに、TCP 座標系の X 軸が吸盤の長辺に平行し、対象物把持点座標系の X 軸が箱の長辺に平行しなければならないという制限をなくしました。以上の機能は互いに干渉せず、パラメータを設定することで様々な把持戦略を作成することができます。
モデルエディタの最適化¶
モデルエディタに「座標系設定」機能を追加しました。「座標系設定」機能により、OBJ 形式モデルがロボットフランジに正確に取り付けられるように基準モデルの座標系の原点と各軸の向きを設定することができます。
モデルエディタのプロジェクトは .m3d ファイルとして保存され、フォルダを作成して保存する必要はありません。
モデルエディタによって生成された OBJ 形式モデルは、Mech-Viz 1.6.0 以前のソフトウェアでも使用可能です。
オイラー角の表示形式の最適化¶
ブランドによって、ロボットのオイラー角はティーチングペンダントで異なる符号で表示されます。例えば ABB は EX、EY、EZ で、KUKA は A、B、C で、Kawasaki は O、A、T を使用します。Mech-Viz 1.7.0 バージョンでは、一部のブランドのロボットにオイラー角タイプの対応関係が表示され、ロボットのオイラー角の符号も確認できます。ユーザーがロボットを選択すると、ソフトウェアではプロジェクトに使用するオイラー角のタイプが自動的にロボットに対応するタイプに変換されます。
ロボットハンド設定の最適化¶
Mech-Viz 1.7.0 バージョンでは、ロボットハンド設定の画面と機能を最適化しました。ロボットハンドの種類、制御ロジックは設定可能になり、対称性設定のパラメータも最適化しました。
対象物設定の最適化¶
Mech-Viz 1.7.0 バージョンでは対象物設定ウィンドウで対称物に関する設定を統合しています。対象物対称性、把持範囲、解選択戦略などの設定を実行できます。
シーンの物体設定の最適化¶
Mech-Viz 1.7.0 バージョンではシーンの物体の作成と設定を「シーンの物体設定」ウィンドウに統合しました。また箱に対し、位置姿勢の有効範囲設定パラメータを最適化しました。
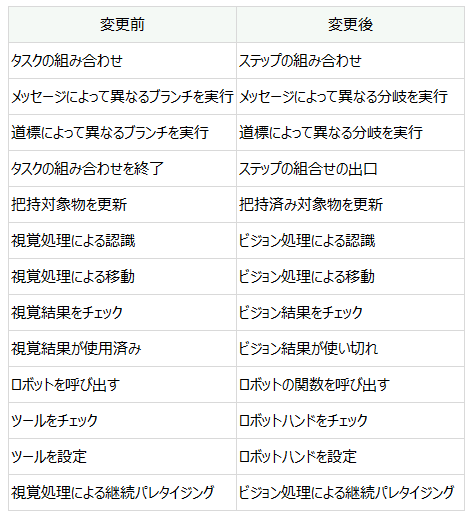
ステップ名の変更¶
Mech-Viz 1.7.0 以降のバージョンでは、「タスク」や「タスクの組み合わせ」はそれぞれ「ステップ」と「ステップの組み合わせ」に変更されます。また、以下のステップの名前を変更しました。
その他¶
メニューバー
ツールバーの「ロボットに送信するメッセージを出力しない」ボタンをなくしました。ロボットに送信するメッセージを常に出力するようにしました。
ツールバーの「デバッグファイル(.dmp)を生成」ボタンをなくしました。新バージョンのソフトウェアではこの機能は使用できません。
では「長さの単位」と「角度の単位」の初期値はそれぞれ「mm」と「 °」に変更しました。
リソース
ツールバーの「自動的に読み込む」ボタンをなくし、新バージョンのソフトウェアでは をクリックするとこの機能を実現します。
吸盤の設定とロボットハンドの設定を「ロボットハンド設定」ウィンドウに統合しました。
ロボットハンド設定、対象物設定、シーンの物体設定ウィンドウを開いたまま 3D シミュレーションエリアで視角調整や拡大・縮小の操作を実行できます。
ステップ
移動ステップのクイック設定、位置姿勢変換、位置姿勢校正、位置姿勢編集ボタンは再配置されました。
「DOリストを設定」のポート番号の上限を 30000 に引き上げました。
「ビジョン結果をチェック」の「未完成」出口を「待ち時間タイムアウト」に変更しました。
「ビジョン処理による移動」の箱の複数把持機能のログを最適化しました。箱の組み合わせ、オフセットの計画履歴が記録されます。
「シーンの物体を更新」に「失敗」出口を追加しました。
「ビジョン処理による移動」ステップを実行して複数の箱を把持する場合、組み合わせられた箱は一つの大きな箱でなく、元のまま複数の箱として扱います。
「相対移動」ステップの「移動基準」のオプションに、「選択」を削除しました。
「RobotIQ設定」と「ロボット関数を呼び出す」ステップを削除しました。
「ビジョン処理による移動」の「実際に把持を実行した位置姿勢を保存」パラメータと関連機能をなくしました。
ロボットパネル
ロボット関節角度のスライダーにより動的リミットが表示されるようになりました。
Yaskawa PL80、MPL80II、MPL100II ロボットの関節角度表示を最適化しました。
ロボットを切り替えてからロボットハンドリストがクリアされません。
プロジェクトに必要なロボットが見つからない場合、ロボットライブラリからロボットを再選択することが可能になりました。
衝突検出
点群衝突検出の実行にかかわらず、「ビジョン処理による移動」により把持対象物の点群を除去できるようになりました。
点群衝突検出の実行にかかわらず、「ビジョン処理による認識」をリセットすると点群もリセットできるようになりました。
通信
「その他」パネルに、「隣接する経路点をスキップ」パラメータを追加し、これを設定することで隣接する経路点の二番目の経路点を送信するかを指定することが可能になりました。
「その他」パネルの「TCP位置姿勢を送信」ボタンをなくしました。新バージョンのソフトウェアでは常に送信するようになりました。
問題修復¶
Mech-Viz 1.7.0 では以下の問題を修復しました:
古いプロジェクトを開けない時に一部のワークフローがインポートされる問題を修復しました。
プロジェクトをロックした状態でパスワード無しで新規ユーザー登録できる問題を修復しました。
プロジェクトを閉じるときに未保存の変更があるとのメッセージが表示されない問題を修復しました。
シミュレート/実行中に座標軸をドラッグするとシーンの物体の位置が変更できる問題を修復しました。
シミュレート/実行中にロボット TCP 座標軸をドラッグすると仮想ロボットが移動できる問題を修復しました。
ロボットインストールパッケージファイルの大文字が原因でインストールが失敗する問題を修正しました。
ロボットハンドを作成する時に、3D シミュレーションエリアにおける TCP 座標系は設定通りに変化しない問題を修復しました。
ワークフロー自動レイアウトしたあと、ステップのアイコンが重なる問題を修復しました。
ワークフローで検索機能で検索するステップが変化する問題を修復しました。
ビジョンサービスが「ビジョン処理による認識」にトリガーされていない時、「ビジョン処理による移動」のエラーメッセージが間違う問題を修復しました。
「ビジョン処理による移動」がビジョン結果を再使用して経路計画が失敗した時、エラーメッセージが不明確な問題を修復しました。
「ビジョン処理による移動」の把持数が設定した値に達していない時に表示されるメッセージが間違う問題を修復しました。
「把持済み対象物を更新」がビジョン結果を使用する時に対象物の寸法が使用される問題を修復しました。
外部モデルを使用した対象物を把持する時に、対象物モデルが把持されない問題を修復しました。