移動¶
機能¶
ロボット経路にある目標位置姿勢とこの位置姿勢に到達する方式を設定します。
パラメータ¶
- 移動ステップの基本的なパラメータ
詳しくは 移動ステップの共通パラメータ をお読みください。
- 把持されている対象物の衝突検出設定
詳しくは 把持された対象物との検出モード をお読みください。
- 基本的な移動設定
詳しくは 基本的な移動設定 をお読みください。
自動障害物回避¶
ロボット経路計画の成功率を向上させるため、移動ステップ関連の経路点の近くに複数の候補点を設定します。
障害物回避のモード¶
経路計画の速度と成功率の要件によって 障害物回避のモード を選択します。
自動障害物回避を無効にする:自動障害物回避機能を使用しません。速度優先:経路を計画するとき速度を優先します。候補点が最も少ないです。成功率優先:経路を計画するとき成功率を優先します。候補点が最も多いです。バランス:速度と成功率のバランスを取ります。候補点が多くも少なくもないです。
- 位置調整の範囲(半径)
- 角度調整の範囲
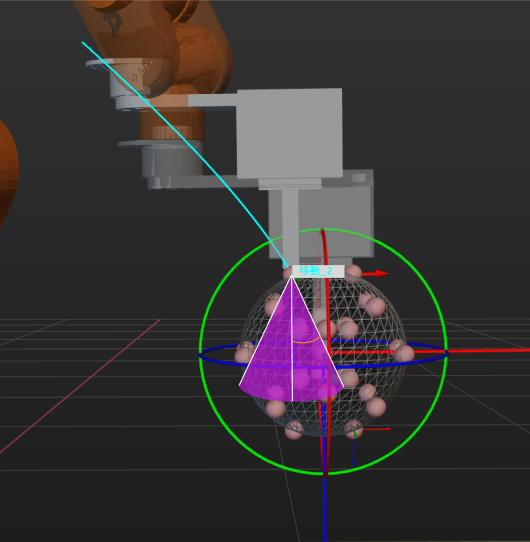
- すべての候補位置姿勢を表示
デフォルトではチェックが入っており、すべての候補点が表示されます。チェックを外すと表示されません。
例¶
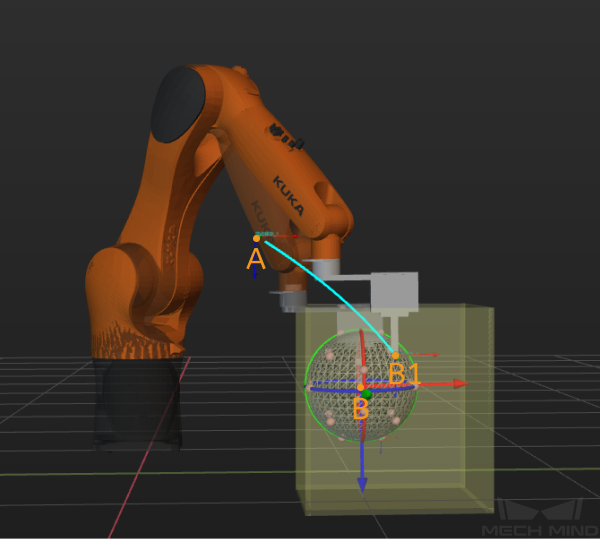
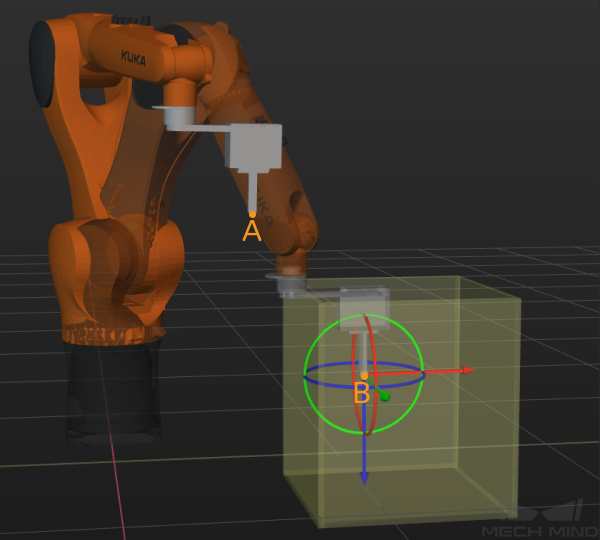
下図に示すように、経路点 A から B まで移動すると、ロボットハンドは箱と衝突します。
経路点 B に障害物回避モードをオンにしてパラメータを設定すると、下図に示すように、候補点の中に衝突が発生しない B1 へ移動します。