グリッドによる移動¶
機能¶
ロボット経路にグリッドにを形成する複数の 目標位置姿勢 とこの位置姿勢に到達する 運動方式 を設定し、順序に従って各点に移動します。
パラメータ¶
- 移動ステップの基本的なパラメータ
詳しくは 移動ステップの共通パラメータ をお読みください。
- 把持されている対象物の衝突検出設定
詳しくは 把持された対象物との検出モード をお読みください。
注釈
普通、ロボットが対象物を把持した後の 1つまたは 2つの移動ステップに 衝突を検出しない を選択します。選択すると衝突が発生する恐れがあります。
デパレタイズのシーンでは、シーンの物体との衝突を検出しない をチェックしても対象物と配置済みの箱との衝突検出に干渉しません。箱の山の下にシーンの物体がある場合、解選択に成功するためにこれをチェックしてください。
インデックス
- 開始インデックス
今到達しようとする位置姿勢のインデックス。例えば、一番目のインデックスは 0 となります。グリッドの三番目の位置姿勢から移動する場合、2 に設定してください。
- 現在のインデックス
今移動を実行している点のインデックス。
グリッド設定
グリッドの方向にある点の数の間隔を設定します。
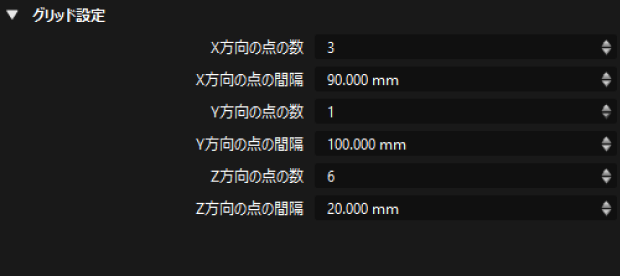
- X 方向の点の数:
グリッドの X 方向にある点の数。
- X 方向の点の間隔:
グリッドの X 方向にある隣接する点の間隔。
- Y 方向の点の数:
グリッドの Y 方向にある点の数。
- Y 方向の点の間隔:
グリッドの Y 方向にある隣接する点の間隔。