対象物の回転対称性¶
本節では、対象物の回転対称性について説明します。
概要¶
注釈
本節では、「対称性」とは「回転対称性」を指します。
対象物の対称性とは、対象物の対称軸を中心に回転させたときに、回転前の形状と一致する能力を指します。対象物が対称性を持つ場合、ユーザーは特定の要件に基づいて、対象物設定で対称性関連のパラメータを設定設定することができます。対象物の対称性を設定することで、ロボットの把持や配置時の先端の回転を抑え、計画の成功率を高め、計画時間を短縮し、よりスムーズで高速なロボット動作を可能にします。
対象物の対称性¶
回転対称軸の決定¶
回転対称軸は、 マッチングモデル・把持位置姿勢エディタ で設定された幾何学的中心点の軸を使用します。回転対称軸は唯一ではなく、対象物の配置やロボットハンドの種類など他の要因と合わせて、同じ対象物に複数の幾何学的中心点が設定される場合があり、それが回転対称軸の決定に影響します。
以下は、一般的な配置方式で対象物の対称性一覧です。使用している対象物の回転対称軸がわからない場合は、 マッチングモデル・把持位置姿勢エディタ で幾何学的中心点の設定を確認してください。

Z軸を中心とした対称性のある対象物¶
一般的な配置では、下表に示すような対象物がZ軸を中心とした対称性のある対象物です。
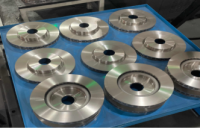
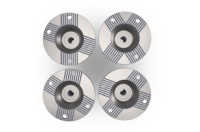


ブレーキディスク
フランジ
歯車
段ボール箱
X/Y軸を中心とした対称性のある対象物¶
一般的な配置では、下表に示すような対象物がX/Y軸を中心とした対称性のある対象物です。
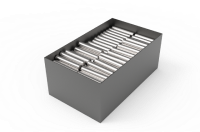



整列して並べられた鋼棒
ばら積み鋼棒
ホースコネクタ
ボルト
対称回数¶
対象物の対称軸を中心に特定の角度(a°)で回転させると、回転前の形状と一致し、対称回数N=360°/a°とすることができます。
一般的な直方体は対称回数N=2、三角柱は対称回数N=3、円柱は対称回数N=正の無限大(ソフトウェアでの円対称に対応)です。

|

|

|

|
N = 2 |
N = 4 |
N = 4 |
円対称(任意角度で回転対称) |
