UR(优傲)¶
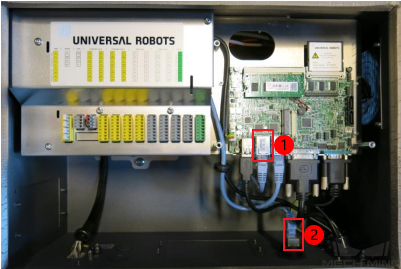
本节介绍如何主控 UR 机器人,包含以下5步:
UR 机器人通过运行优傲脚本控制其运动,因此工控机可以通过向机器人发送优傲脚本以控制机器人。
注意
机器人每收到一个脚本,便会立即执行。如果程序没有执行完成,此时收到另一段包含运动的脚本,机器人会急停,然后立即执行最新的脚本。如果通过 30002 端口发送一段用 sec 定义(不是 def 定义)的不包含运动的脚本函数(例如改变某一个变量值),机器人不会急停。
对于 UR5E 等带有 E 系列的机器人,将机器人改为远程控制,Mech-Viz 才能控制机器人运动,否则只能同步机器人,不能移动机器人。
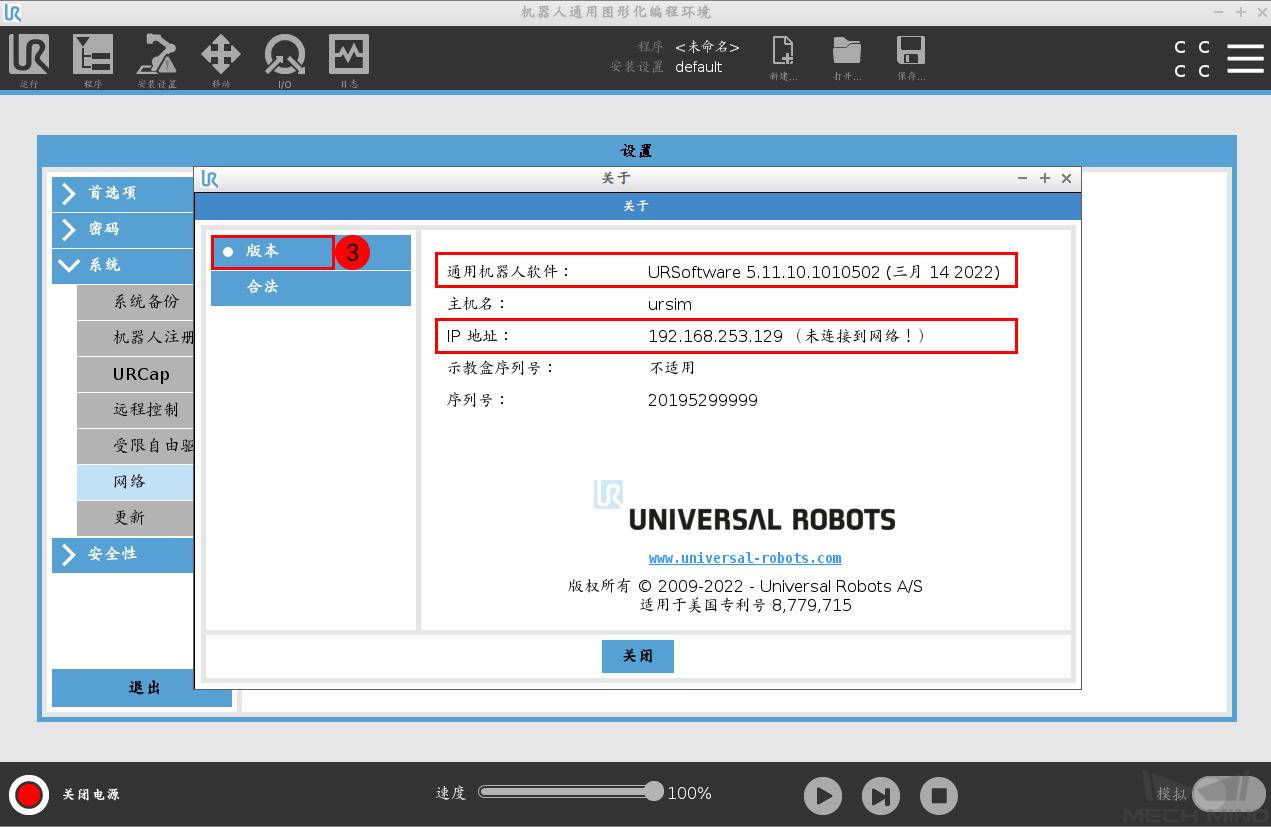
查看 IP 和控制器版本¶
单击示教器右上角图标。

选择 关于 。

单击 版本号 。
配置 IP¶
单击示教器右上角图标。
选择 设置 。

依次单击 。

正确配置 IP 地址,使其与工控机 IP 在同一网段,完成后单击 应用 。
开启远程控制¶
单击示教器右上角图标。
选择 设置 。
依次单击 。
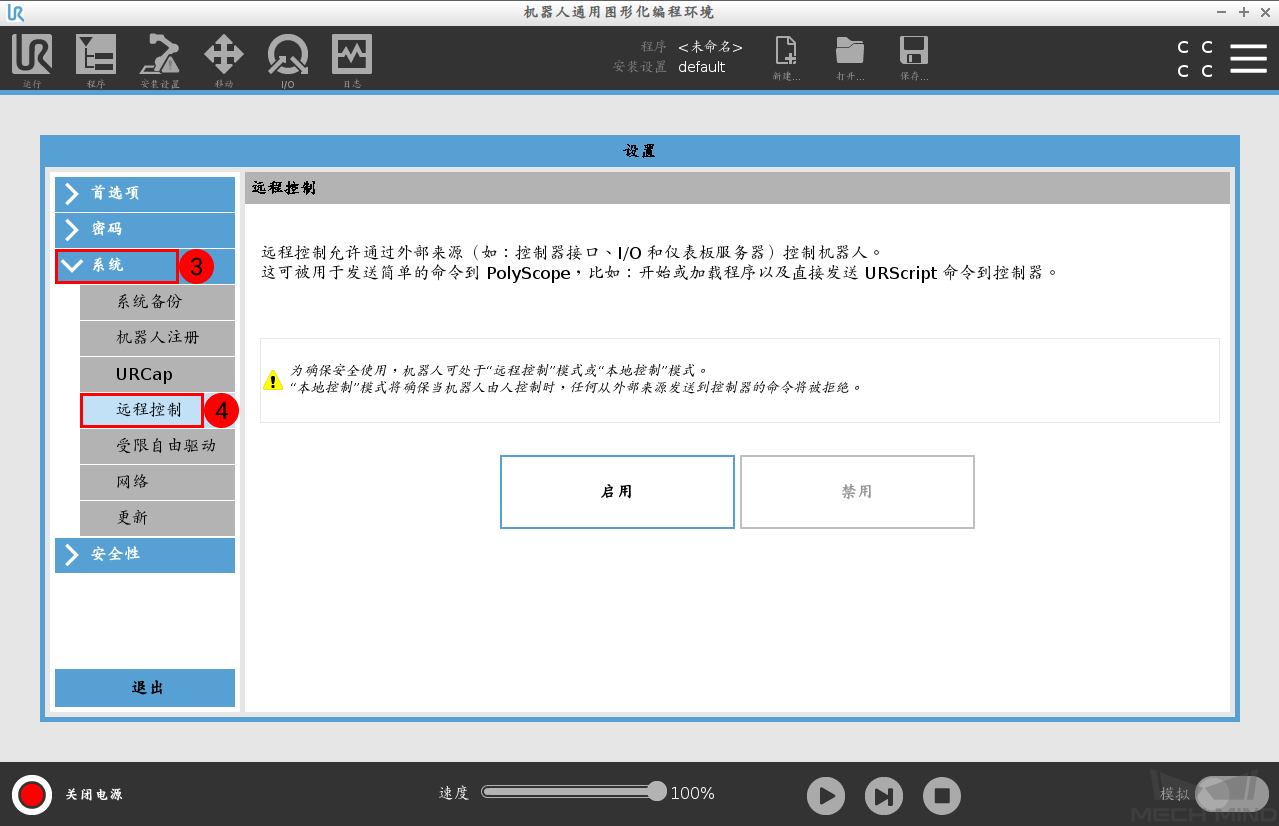
单击 启用 以启用远程控制模式。