TM(达明)¶
本节介绍如何主控 TM 机器人,包含以下 4 步:
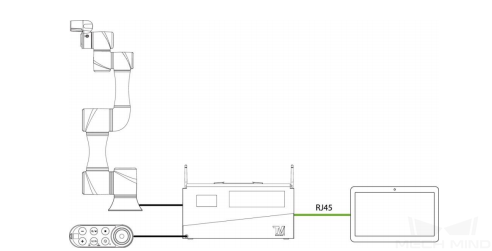
获取机器人软件及机器人控制权¶
在客户端设备开启 TMflow ,按下左上角重新整理的图示,等待联机画面出现对应的机器人编号。
单击两次画面中的机器人,即可与机器人进行联机。确认画面中呈现所有在此网段下之机器人。用户可由机器人的 Robot ID(显示于机器人控制棒上之 QR 码下方之编号)来区分将要连接的机器人是哪台机器人。
机器人联机成功时,画面中机器人上会出现 图标且右上方出现机器人的图示。
单击取得控制权,以获取机器人的控制权
注意
仅支持 1.683200 版本的机器人系统。
烧录文件至机器人中¶

程序烧录¶
注意
将 U 盘命名为 TMROBOT ,否则 TM 机器人控制柜无法识别 U 盘 ;
将 TM_Export 整个文件夹复制到 U 盘中,插入控制柜。
进入机器人界面,取得机器人 administrator 权限后,依次选择 ,恢复备份文件 mechmind.zip 。
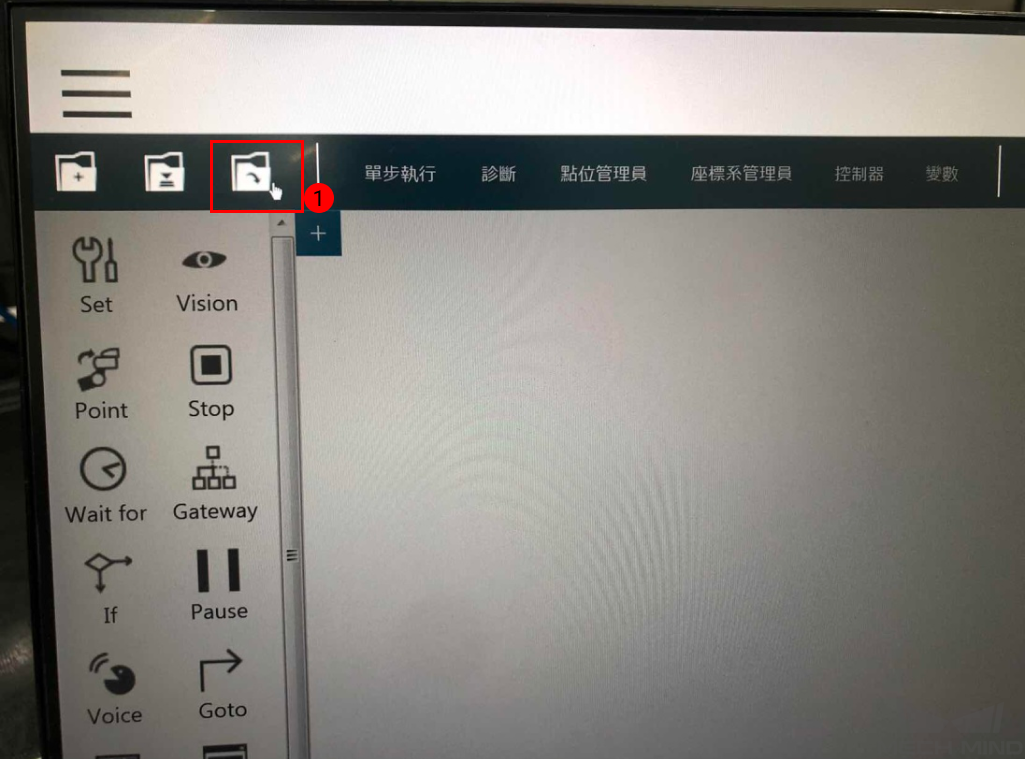
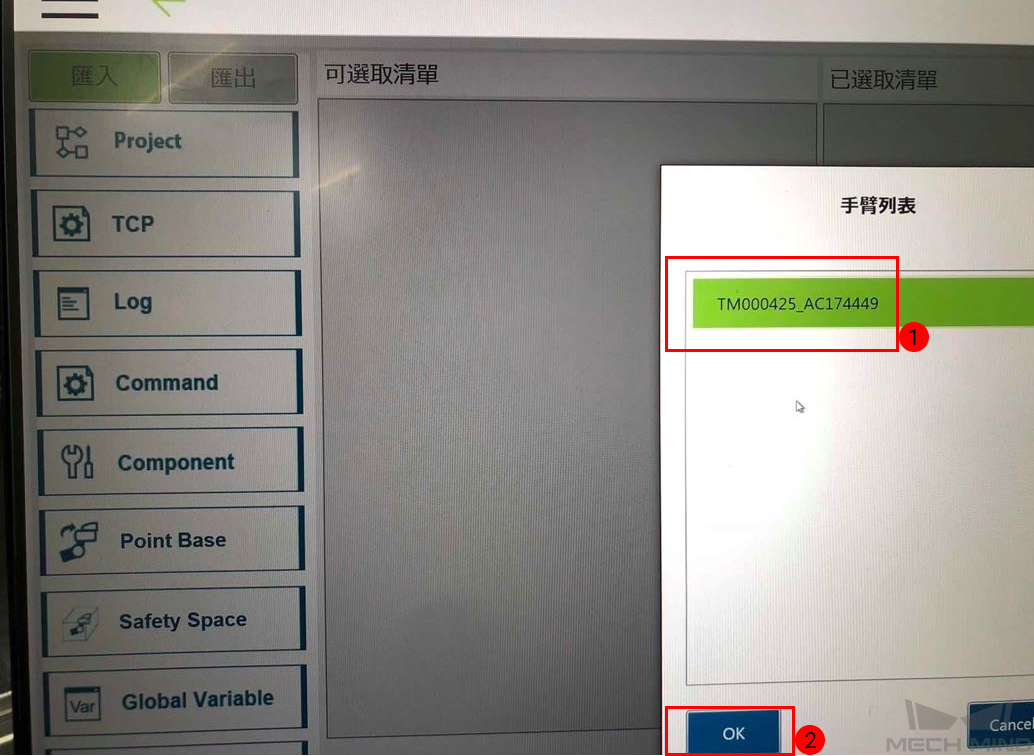
选择 汇入/汇出 。

选择手臂列表:TM000425_AC174449,单击 OK 。
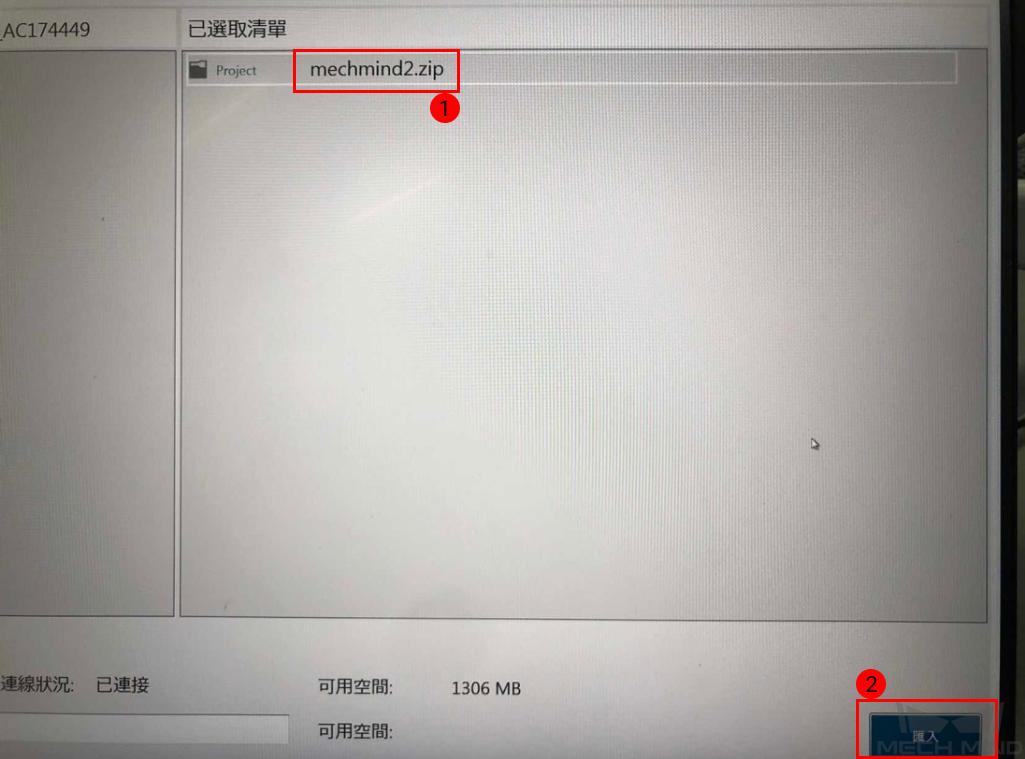
在 Project 选项下找到 Project>mechmind2.zip ,单击选中。
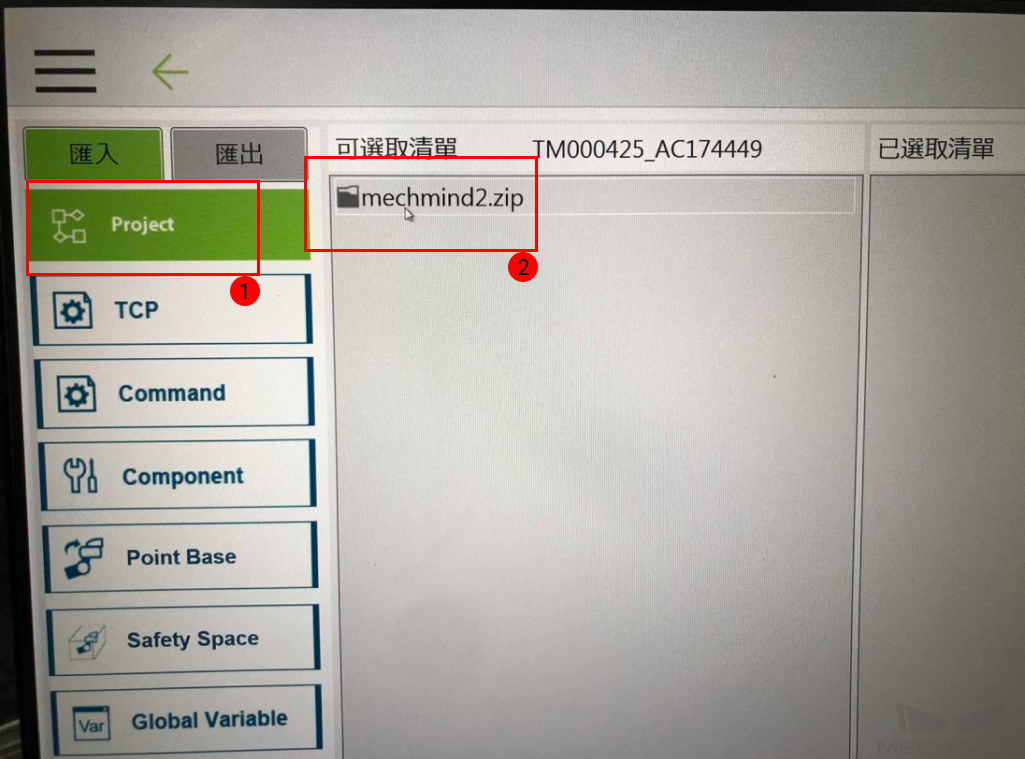
单击 mechmind2.zip 后,单击 汇入 ,此时程序写入完成。
选择 机器人系统专案 ,选择 mechmind2 ,单击 确认 。