ROKAE(珞石)¶
本节介绍如何主控 ROKAE Xmate7 协作机器人,包含以下4步:
检查控制器及软件版本¶
打开 ROKAE Xmate7 控制软件后,按下图所示操作连接机器人,若弹窗提示不支持当前机器人型号,按软件提示完成更新即可。

手动升级控制器软件版本,升级过程如下:
请下载 软件升级包 后复制到 U 盘中。
进入帮助界面。

进入软件升级界面,单击 打开 ,加载 U 盘中的升级包,之后单击 上传 。

Mech-Center 1.5.0 及之后版本,支持 3.6 版本的珞石控制器。若控制器版本低于 3.6 ,请使用低于 1.5.0 版本的 Mech-Center 。
建立网络连接¶
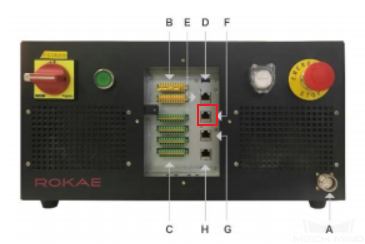
IP 设置¶
机器人 IP 默认为 192.168.0.160 ,请修改工控机 IP 为 192.168.0.222 。 修改完成后在 cmd 命令行窗口使用 ping 192.168.0.160 命令来检查连接。
烧录文件至机器人中¶
复制烧录文件¶
提示
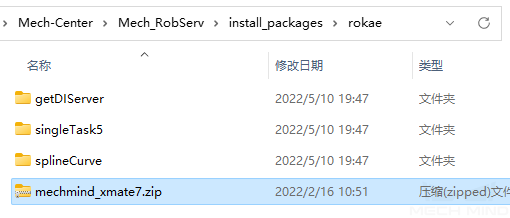
烧录文件位于 Mech-Center 安装文件夹中。
将 XXX\Mech-Center\Mech_RobServ\install_packages\rokae 文件夹中的 mechmind_xmate7.zip 拷贝到 U 盘中。






配置外部通信¶
单击 机器人 。

依次单击 进入外部通信配置界面。按下图所示操作,打开 使能 ,并完成 socket 配置。

测试机器人连接状态¶
在 Mech-Center 中单击 主控机器人 。
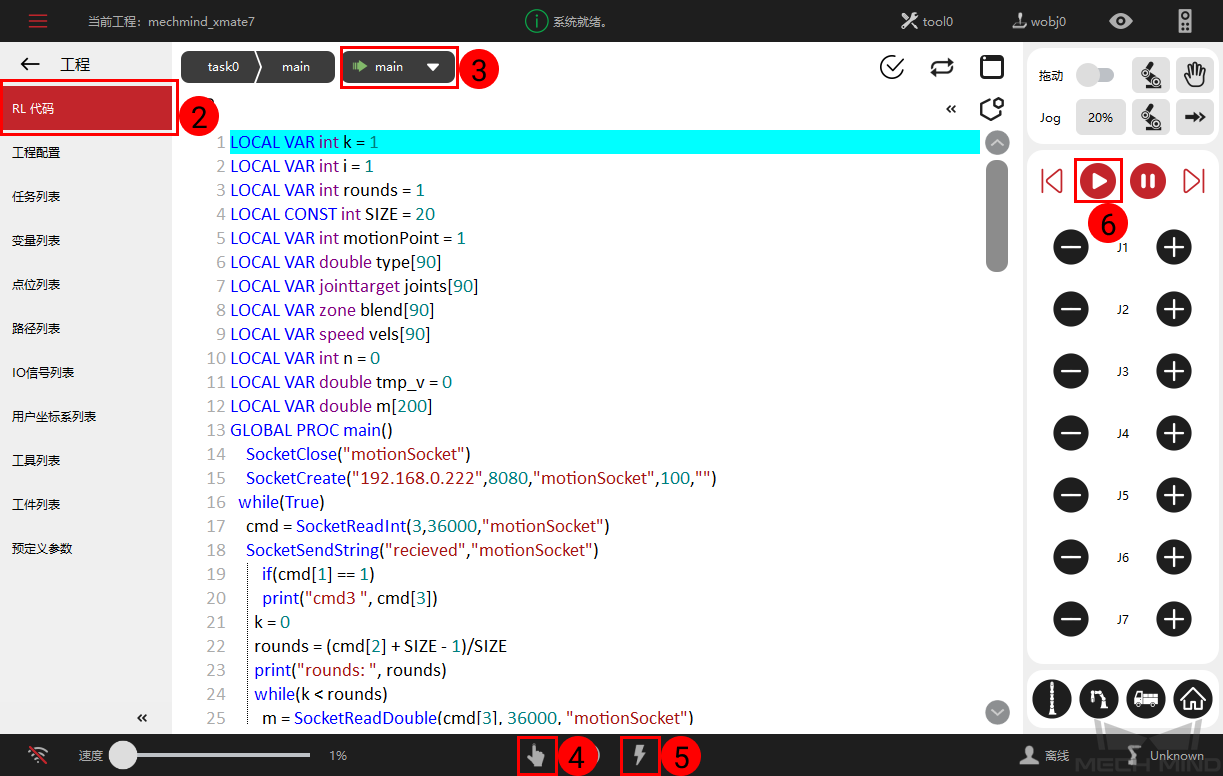
运行机器人程序。

在 Mech-Center 的日志栏中打印 Robot server 连接机器人成功 表示机器人连接成功。