运动路径优化¶
本节将通过以下几点来优化运动路径,使路径更加合理。
增加“拍照点”¶
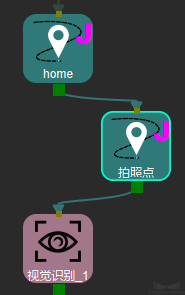
“Home点 - 抓取点”之间增加 拍照点 。
使用示教器移动机器人到达用户自定义的拍照点。
提示
注意机器人所处的位置不能遮挡相机视野,可使用Mech-Eye软件采集图片,来验证有无遮挡视野。
添加一个 move 来记录机器人此时所处的位姿。设置名称为 拍照点。
增加“抓取相对移动点”¶
合理的抓取动作应为:吸盘垂直向下移动到抓取点,吸取物体后垂直向上移动。
使用 相对移动 来达到这一目的。
吸盘由距离抓取点Z向的200mm处,垂直向下移动。
找到: ,将其拖拽到工程编辑区。(相对移动_1)
参数设置:
相对于(移动任务)勾选 下一个 ;
坐标系Z值设值为-200;
其余使用默认值。

吸盘吸取物体后,垂直向上移动200mm。
找到: ,将其拖拽到工程编辑区。(相对移动_2)
参数设置:
相对于(移动任务)勾选 当前 ;
坐标系Z值设值为-200;
其余使用默认值。

增加“放置相对移动点”¶
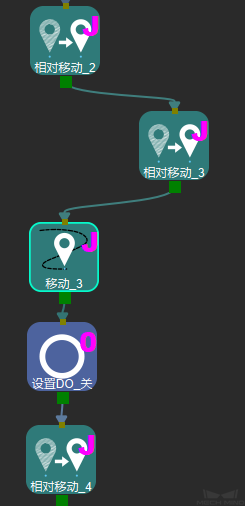
参考上一步设置,增加2个相对移动任务。
吸盘由距离放置点Z向的200mm处,垂直向下移动。
相对于(移动任务)勾选 下一个 ,坐标系Z值设值为-200。(相对移动_3)
吸盘释放物体后,垂直向上移动200mm。
相对于(移动任务)勾选 当前 ,坐标系Z值设值为-200。(相对移动_4)
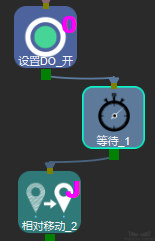
增加“抓取、放置等待”¶
在吸盘吸取物体后,等待一段时间,使吸盘能够牢固吸附物体。
借助 wait 任务,使机器人运行到此任务时,等待指定时间,单位:毫秒(ms)。
找到 ,将其拖拽到工程编辑区。参数使用默认值即可。
吸盘释放物体后,等待一段时间,使吸盘能够完全释放物体。

仿真¶
点击 仿真 开始仿真机器人的运动路径。
此次仿真,用户可发现路径更加合理。请继续查看下一节内容。