开始你的第一个应用
软件使用指南
机器人通讯配置指南
应用指南
附录
至此,用户已经成功获取到了纸箱的位姿,并且成功仿真了 抓取纸箱 ‣ 放置纸箱 这一运动过程。 现在可以尝试运行真实机器人来实现首次抓取。
将Mech-Viz工具栏中的机器人速度调整为5%。 注意 务必降低机器人运动速度!
将Mech-Viz工具栏中的机器人速度调整为5%。
注意
务必降低机器人运动速度!
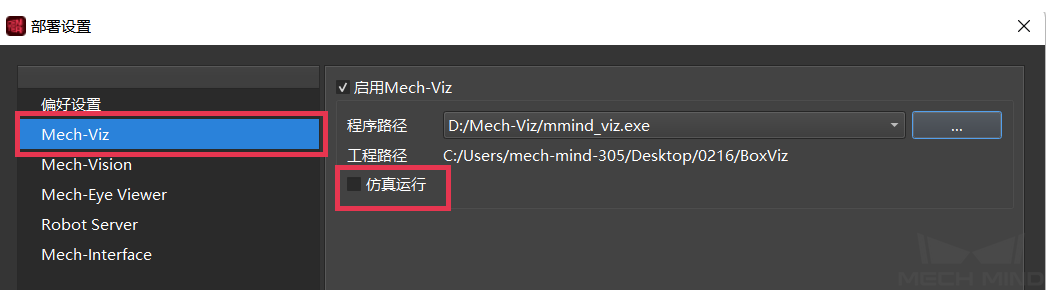
Mech-Center ‣ 部署设置 ‣ Mech-Viz
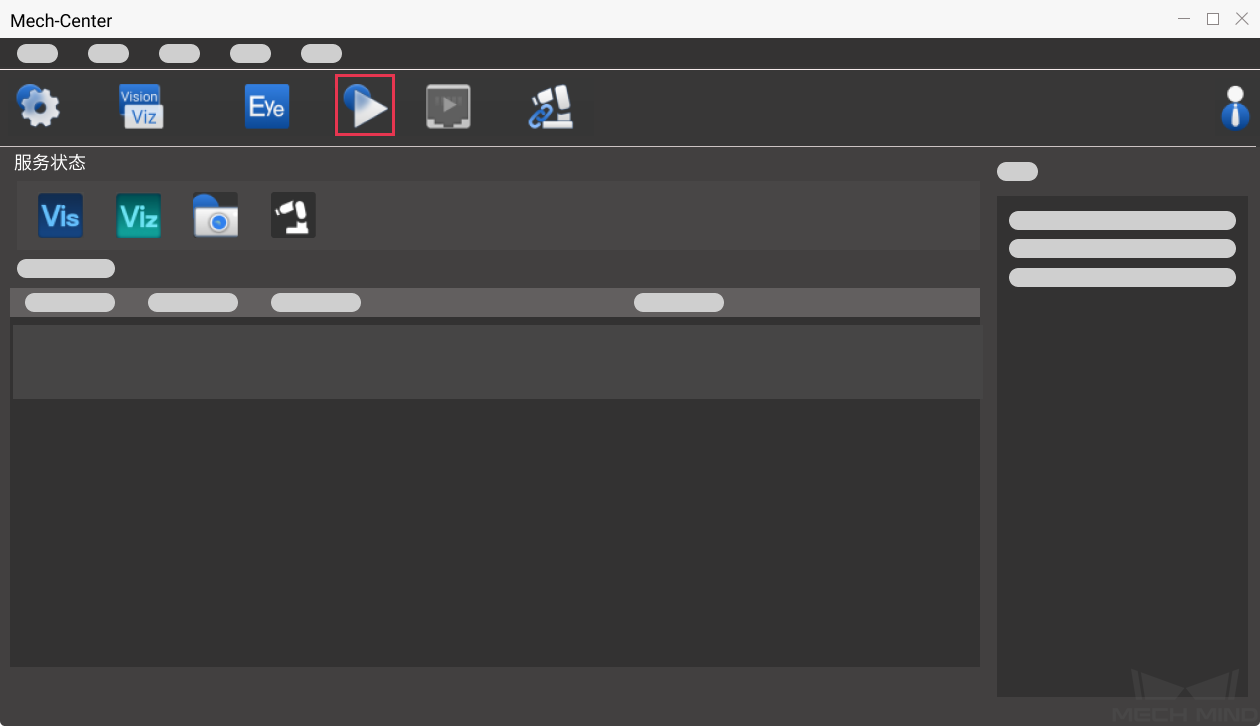
若机器人依照规划的路径运动并将纸箱吸取及放置,那么用户成功完成了首次抓取! 注意 在运行机器人时,请确保人员安全。当发生紧急情况,请按下示教器上的急停按钮!
若机器人依照规划的路径运动并将纸箱吸取及放置,那么用户成功完成了首次抓取!
在运行机器人时,请确保人员安全。当发生紧急情况,请按下示教器上的急停按钮!