添加场景模型与末端执行器模型¶
添加碰撞模型¶
添加碰撞模型用来检查点云碰撞。
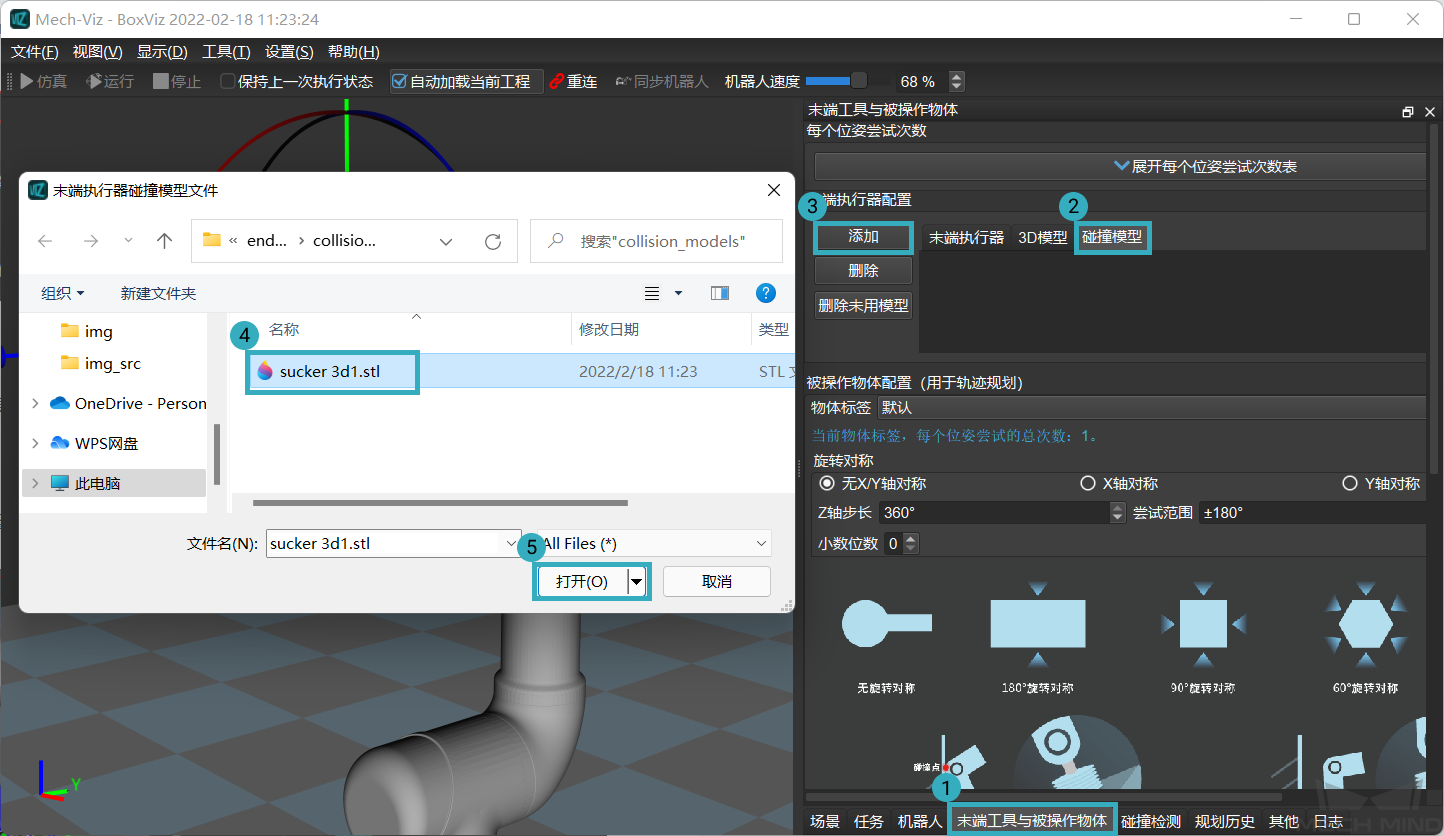
点击底部 末端工具与被操作物体 选项卡;
点击 碰撞模型 ;
点击 添加 ;
选中需要加载的模型;
点击 打开 。
编辑模型变换¶
单击加载后的碰撞模型,来查看模型所处的位置状态。如下图所示,模型位置状态明显错误。
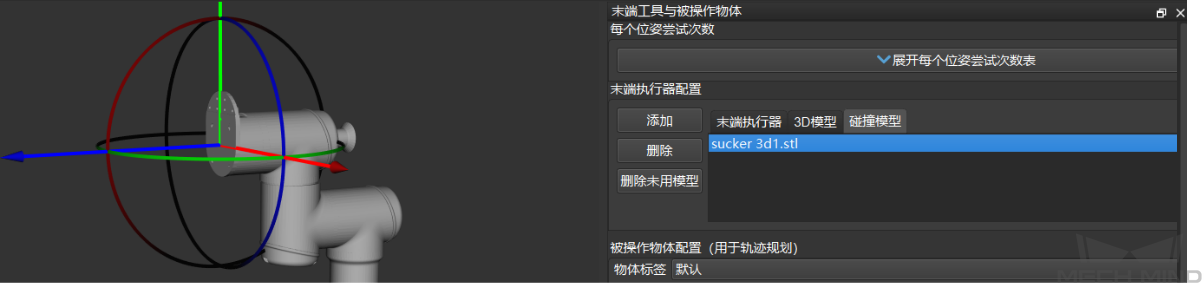
双击模型,弹出 编辑模型变换窗口 。通过调整参数,使碰撞模型处在一个正确的位置状态,如下图所示。

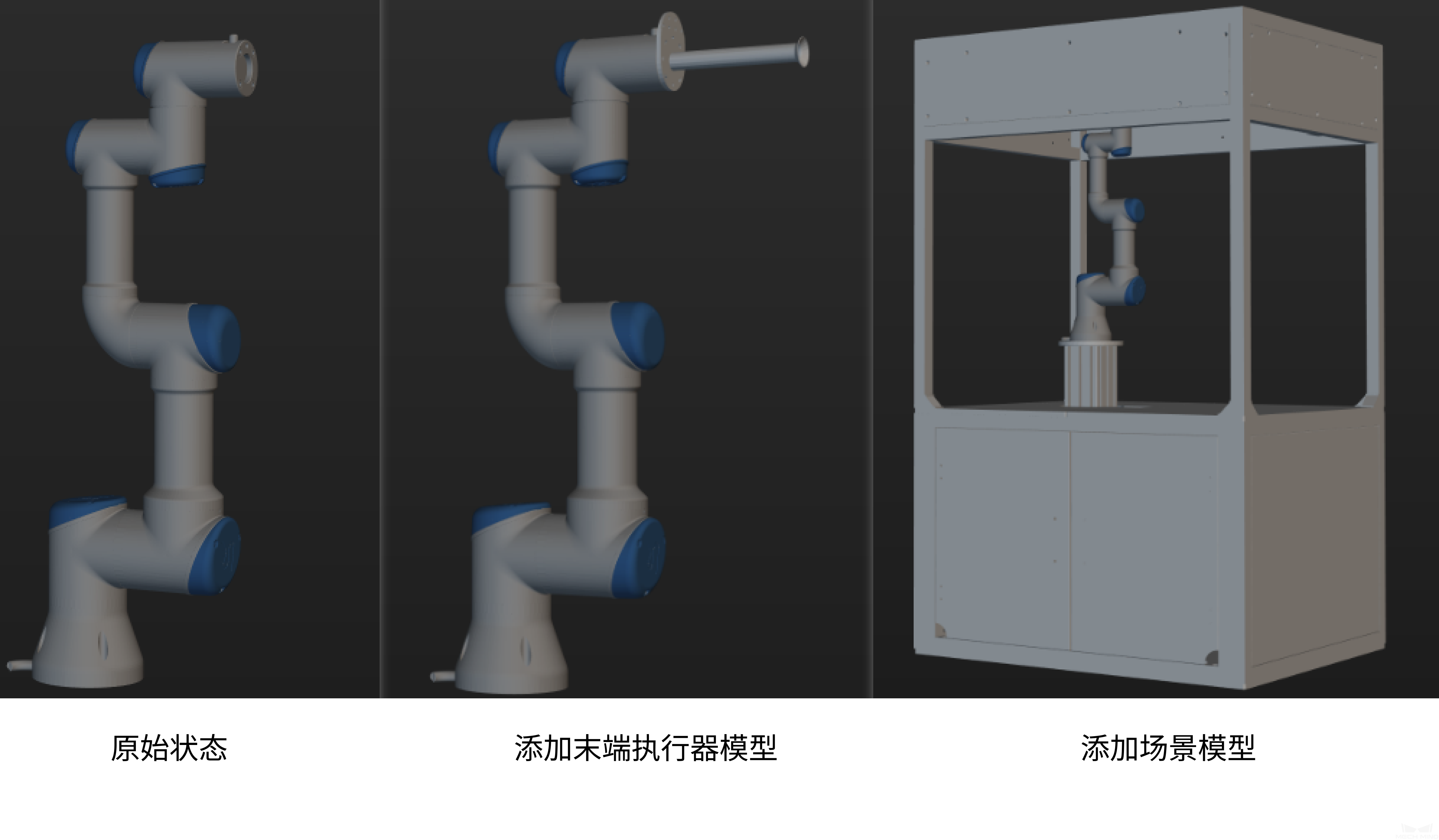
添加末端执行器模型¶
末端执行器模型为用户安装到机器人末端上的夹具模型。

点击底部 末端工具与被操作物体 选项卡;
点击 末端执行器 ;
点击 添加 ;
选择上一步加载的碰撞模型;
输入自定义的末端执行器名称;
点击 OK 。
调整工具中心点¶
工具中心点由拖拽器(机器人模型末端的坐标球)中心点表示。
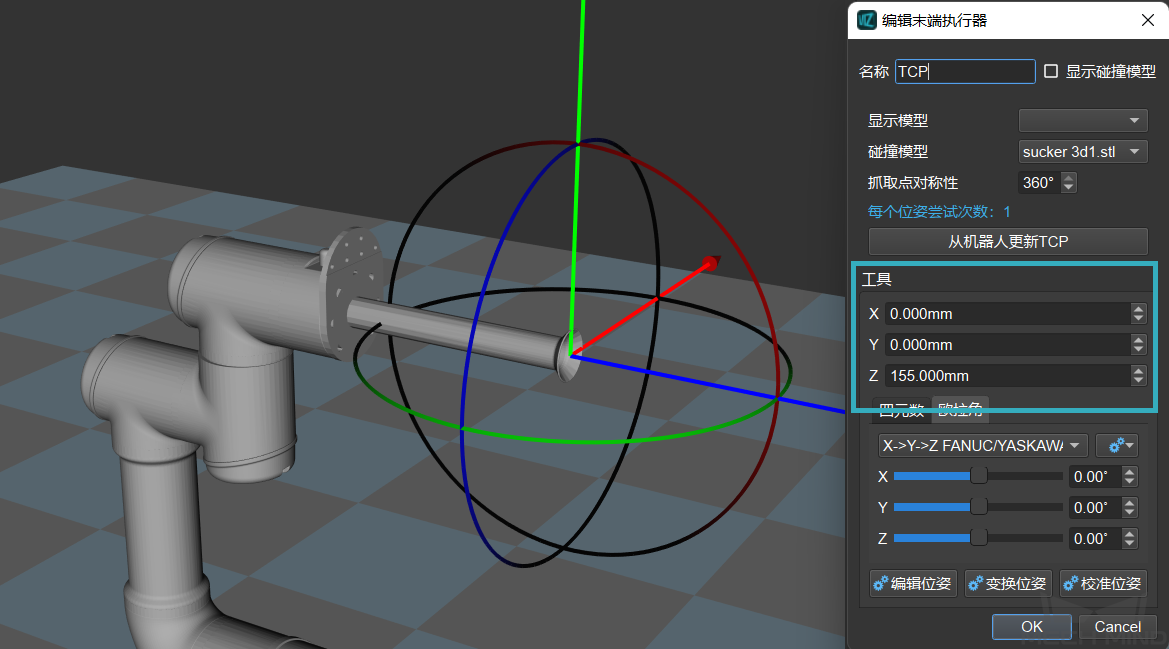
双击上一步添加的末端执行器名称;
修改工具栏的各项参数,调整工具中心点到末端执行器的末端;
点击 OK 完成设置。
模型相关设置完成,请继续查看下一节内容。
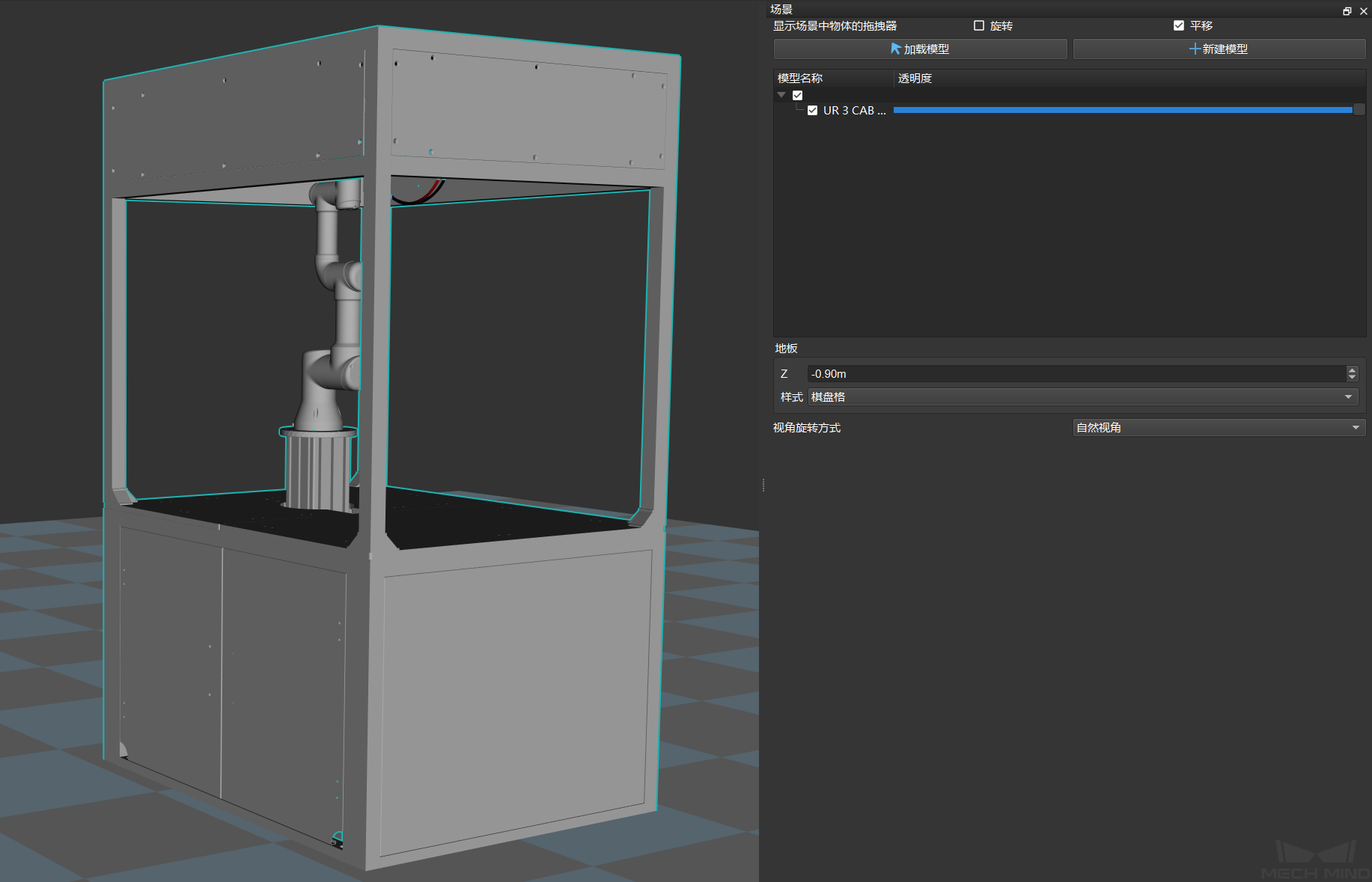
添加场景模型¶
场景模型一般为机器人工位的3D模型。
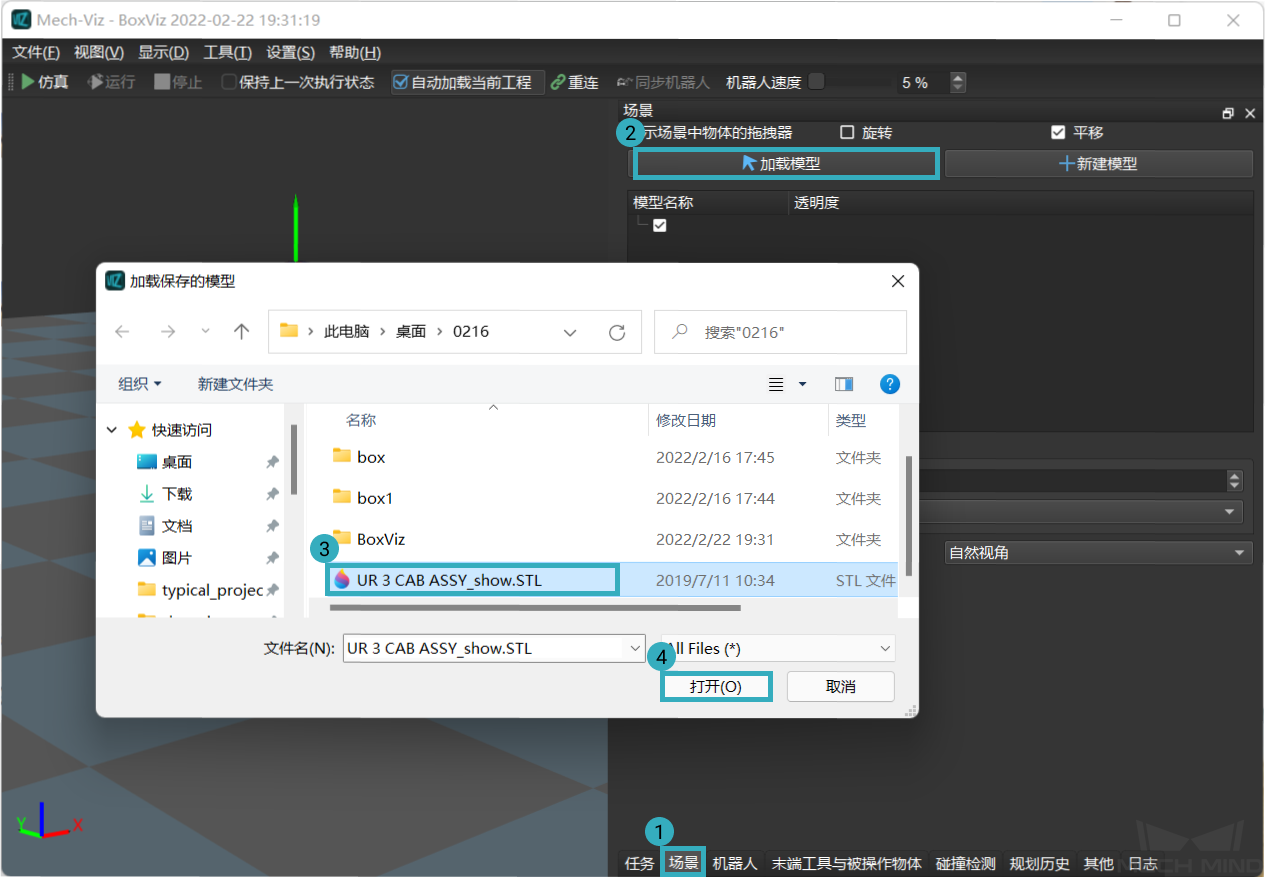
加载完模型后,需要调整 来使场景模型与地板适应。
为了便于后续路径的规划,使场景模型不遮挡机器人模型,可通过拖动滑块,降低场景模型透明度,待路径规划完成后再恢复默认设置。