포즈 스텝 편집기¶
포즈 스텝 편집기 설명¶
포즈 스텝 편집기의 주요 기능은 포즈 조정의 사용성을 높이고 편집 과정 중의 포즈 시각화 기능을 추가하며 포즈 조정의 실행 난이도를 낮춥니다. 포즈 스텝 편집기는 주요 다음과 같은 두 가지 모드가 있습니다:
초기 설정 편집 모드: 사전 설정된 자주 사용하는 기능, 예를 들면, 좌표계 변환, 조정과 배열을 통해 빠르게 포즈를 편집합니다.
자체 정의 모드: 대응하는 스텝을 추가하고 포즈를 편집합니다. 툴에서 편집 후의 포즈 상황을 볼 수 있습니다.
포즈 스텝 편집기의 페이지 소개¶
그림1과 같이 포즈 스텝 편집기의 인터페이스는 주로 4 개 구역으로 나눕니다:
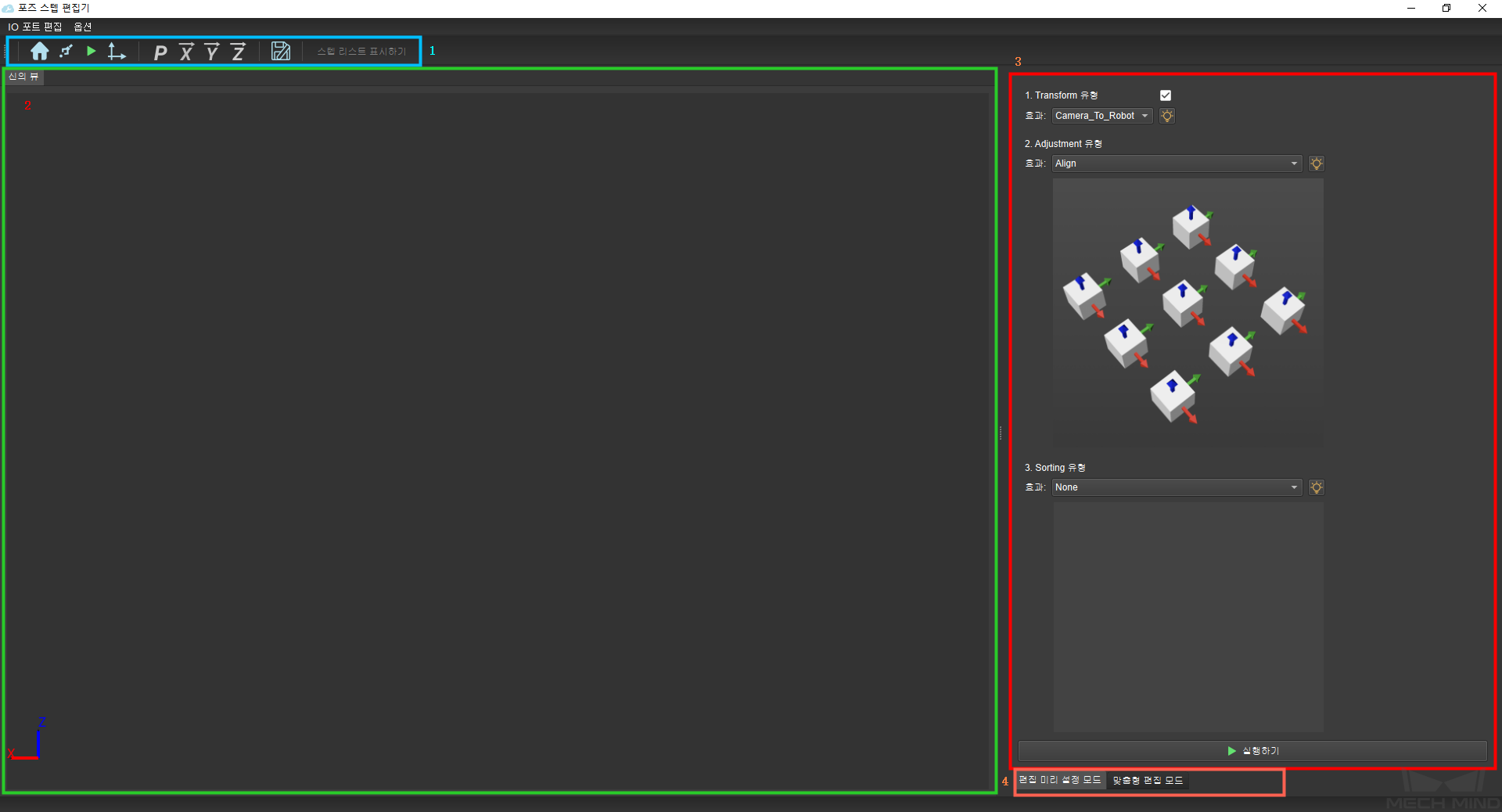
그림1 포즈 스텝 편집기의 인터페이스 페이지 소개¶
툴바
신(scene) 뷰 (포즈 시각화 구역)
편집 구역
편집 모드 선택하기
툴바
주요 기능은 편리하게 포즈를 편집하고 조정할 수 있도록 하는 것입니다. 주요 툴은 다음과 같습니다:
 입력할 때 초기 포즈로 돌아갑니다.
입력할 때 초기 포즈로 돌아갑니다. 신(scene)에서 드래그로 포즈의 위치나 자세를 편집하고 일반적으로 포즈 복제와 함께 사용합니다.
신(scene)에서 드래그로 포즈의 위치나 자세를 편집하고 일반적으로 포즈 복제와 함께 사용합니다. 기존의 모든 스텝을 실행합니다.
기존의 모든 스텝을 실행합니다. 현재의 세계 좌표를 표시합니다.
현재의 세계 좌표를 표시합니다. 현재의 편집한 포즈를 복제합니다.
현재의 편집한 포즈를 복제합니다. X 축 벡터를 복제합니다.
X 축 벡터를 복제합니다. Y 축 벡터를 복제합니다.
Y 축 벡터를 복제합니다. Z 축 벡터를 복제합니다.
Z 축 벡터를 복제합니다. 구성을 JSON 파일에 저장합니다.
구성을 JSON 파일에 저장합니다. 스텝 리스트 표시합니다 (자체 정의 모드에서만 사용).
스텝 리스트 표시합니다 (자체 정의 모드에서만 사용).
신(scene) 뷰
주요 기능은 편집이 완료된 후의 포즈 상황을 보고 후속의 진일보한 조정이 편리하도록 하는 것입니다.
편집 구역
주요 기능은 빠르고 편리하게 포즈를 편집하고 조정하며 선택한 편집 모드에 따라 편집 영역도 달라집니다. 그림2와 그림3과 같습니다.
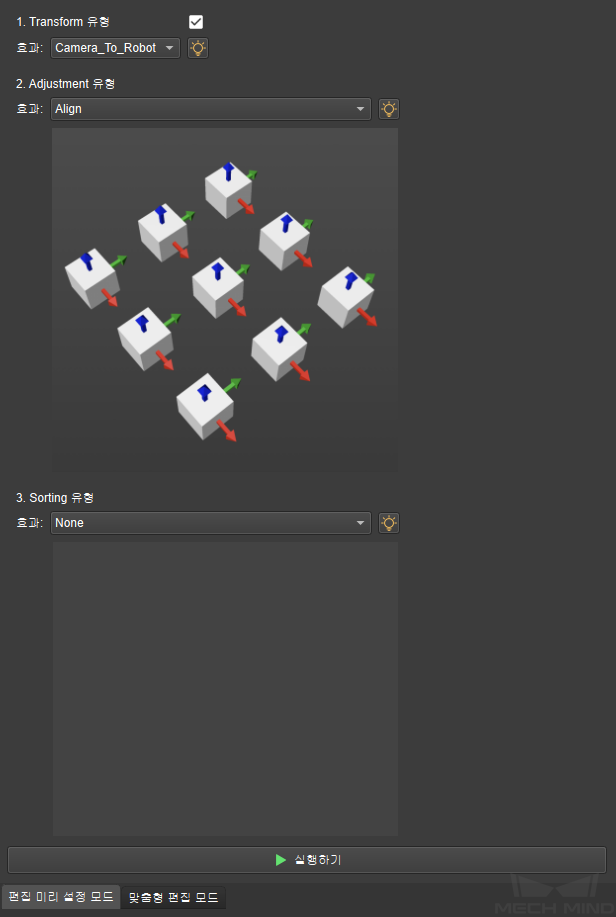
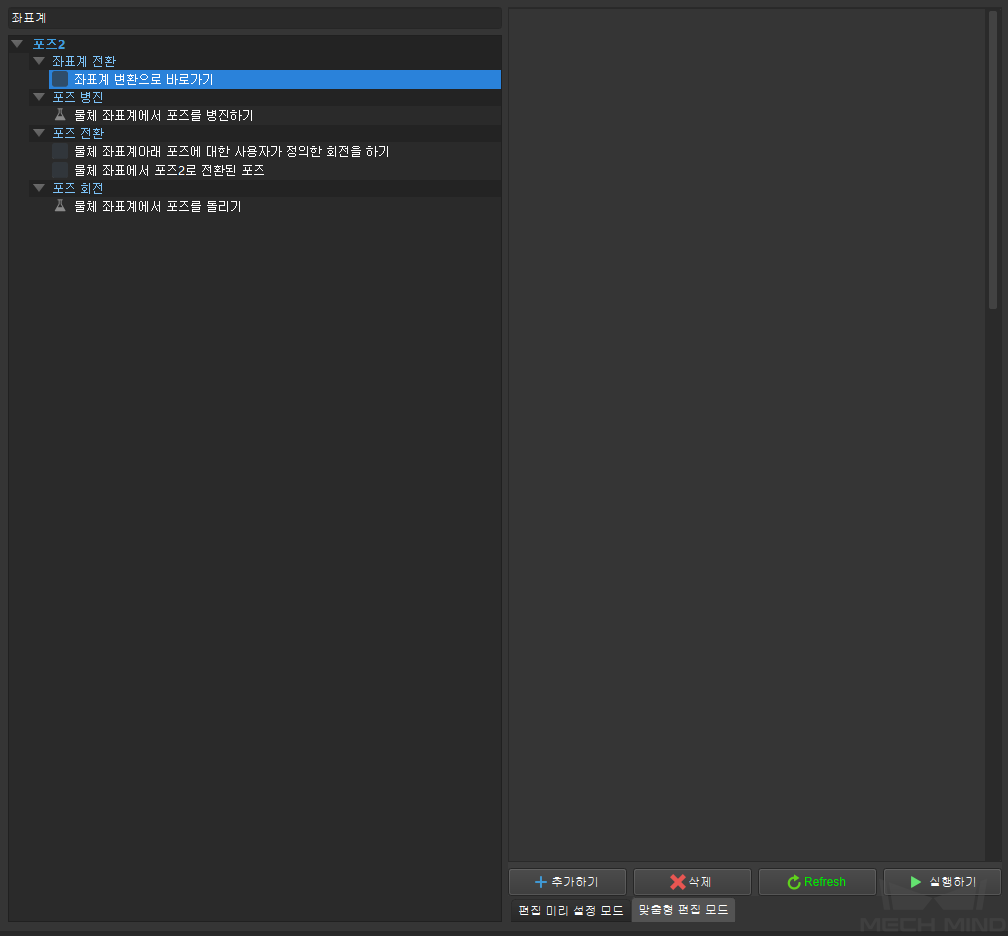
그림2 초기 설정 편집 모드 페이지¶
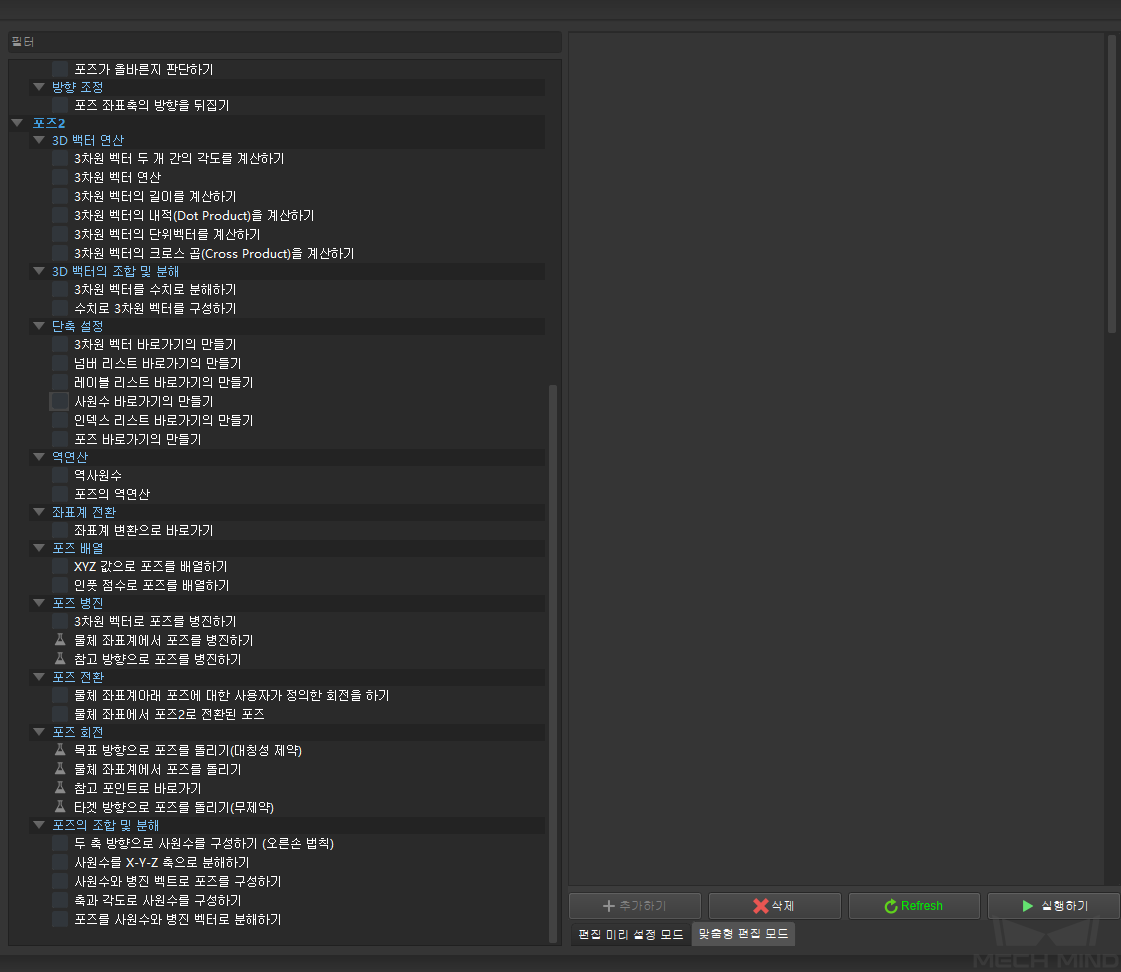
그림3 자체 정의 모드 페이지¶
편집 모드 선택하기
실제 수요에 따라 다른 편집 모드를 선택하고 포즈를 조정할 수 있습니다. 더욱 빠르고 편리하게 포즈를 조정할 수 있도록 두 가지 모드를 섞어 사용하는 것이 좋습니다.
포즈 스텝 편집기 모드 소개¶
초기 설정 편집 모드¶
초기 설정 편집 모드에서 세 가지 유형의 초기 설정 편집 기능이 있습니다:
좌표계 변환: 카메라에서 로봇으로 혹은 로봇에서 카메라로 를 선택함으로써 포즈에 대해 좌표계 변환을 합니다. 그림4와 같습니다.
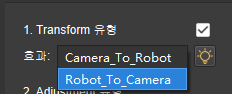
그림4 좌표계 변환¶
조정 유형: 여밈, 팔레타이징 중심에서 멀어지는 방향과 , 한 포인트를 가리킴 등 3가지 조정 유형이 있습니다.
배열 유형: 다섯 가지의 배열 유형을 선택할 수 있습니다. 1.포즈의 병진 벡터가 참고 방향에 있는 투영 거리에 따라 배열하기, 2.포즈부터 참고 포인트까지의 거리에 따라 배열하기, 3.XY 평면에 포즈부터 참고 포인트까지의 투영 거리에 따라 배열하기, 4.포즈의 XYZ 값에 따라 배열하기, 5. 행렬에 따라 배열하기.
포즈 스텝 편집기의 사용 방식¶
다음에 한 프로젝트로 예를 들어, 포즈 스텝 편집기의 사용 스텝을 소개합니다:
스텝1. 먼저 포즈를 편집할 곳에 포즈 스텝 편집기를 여는 데 필요한 스텝 “포즈 조정 집합”을 추가합니다. 그림6과 같습니다.
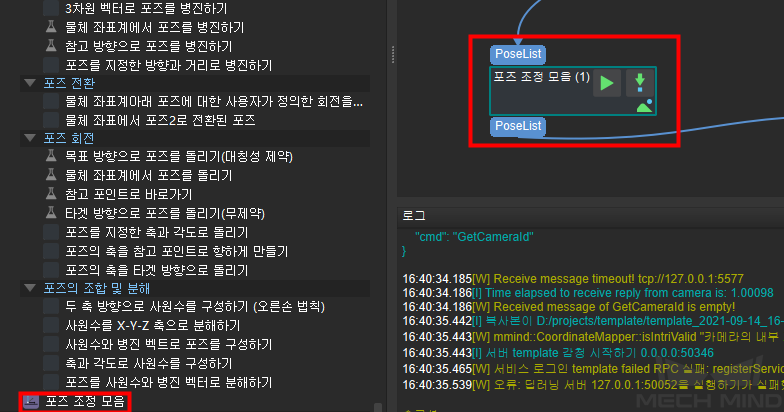
그림6 스텝 “포즈 조정 집합” 추가하기¶
스텝2. 프로젝트 실행을 통해 입력된 포즈을 획득하고 속성 표시줄에 있는 연산 서브 스텝 입력창에 있는 ![]() 버튼을 클릭하고 편집기에 들어갑니다. 그림7과 같습니다.
버튼을 클릭하고 편집기에 들어갑니다. 그림7과 같습니다.
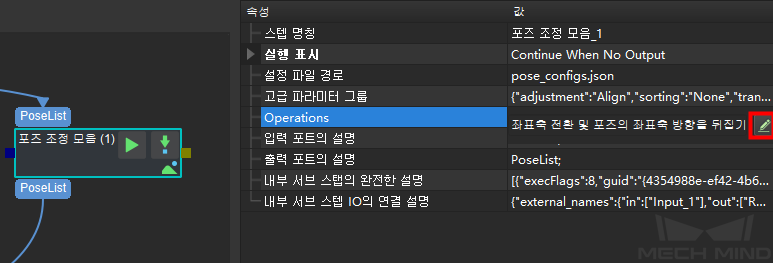
그림7 포즈 스텝 편집기로 이동하기를 클릭하기¶
스텝3. 초기 설정 편집 모드를 통해 필요한 초기 설정의 효과를 선택합니다:1.포즈 좌표를 로봇 좌표계로 전환하고, 2.포즈 방향을 정렬하고, 3. 행렬에 따라 배열하고, 4. 프로그램을 실행하고 결과를 미리봅니다. 결과는 그림8과 같습니다.
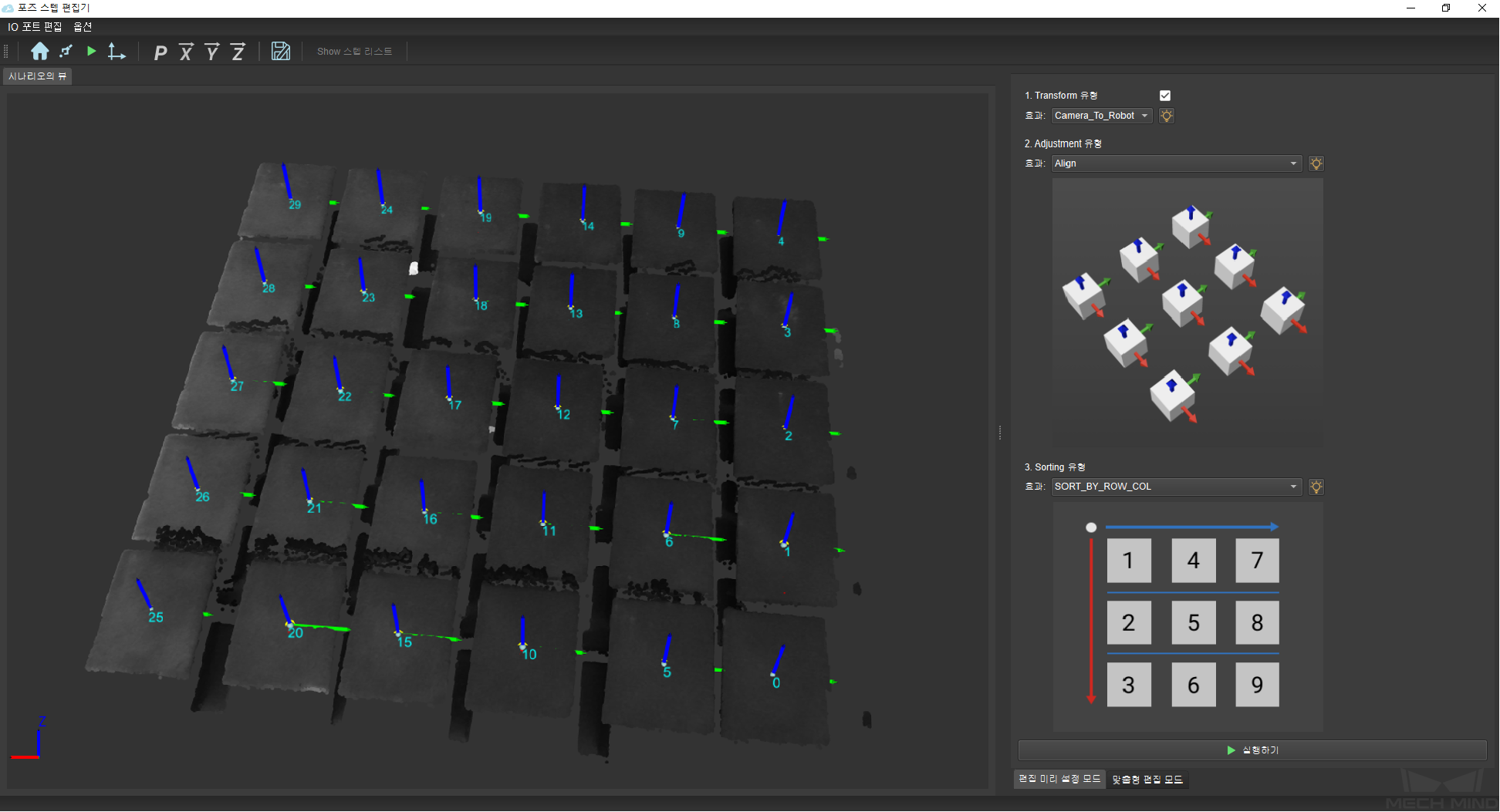
그림8 초기 설정 편집 모드에서 포즈 편집하기¶
스텝4. 자체 정의 모드를 사용하고 출력 수량 제한을 추가합니다:1.자체 정의 편집 모드를 클릭합니다, 2.스텝 리스트 표시합니다, 3.출력 개수를 선택합니다, 4.추가하기를 클릭합니다, 5. 제한 수량을 입력합니다, 6.프로그램을 실행하고 결과를 미리봅니다. 결과는그림9와 같습니다.
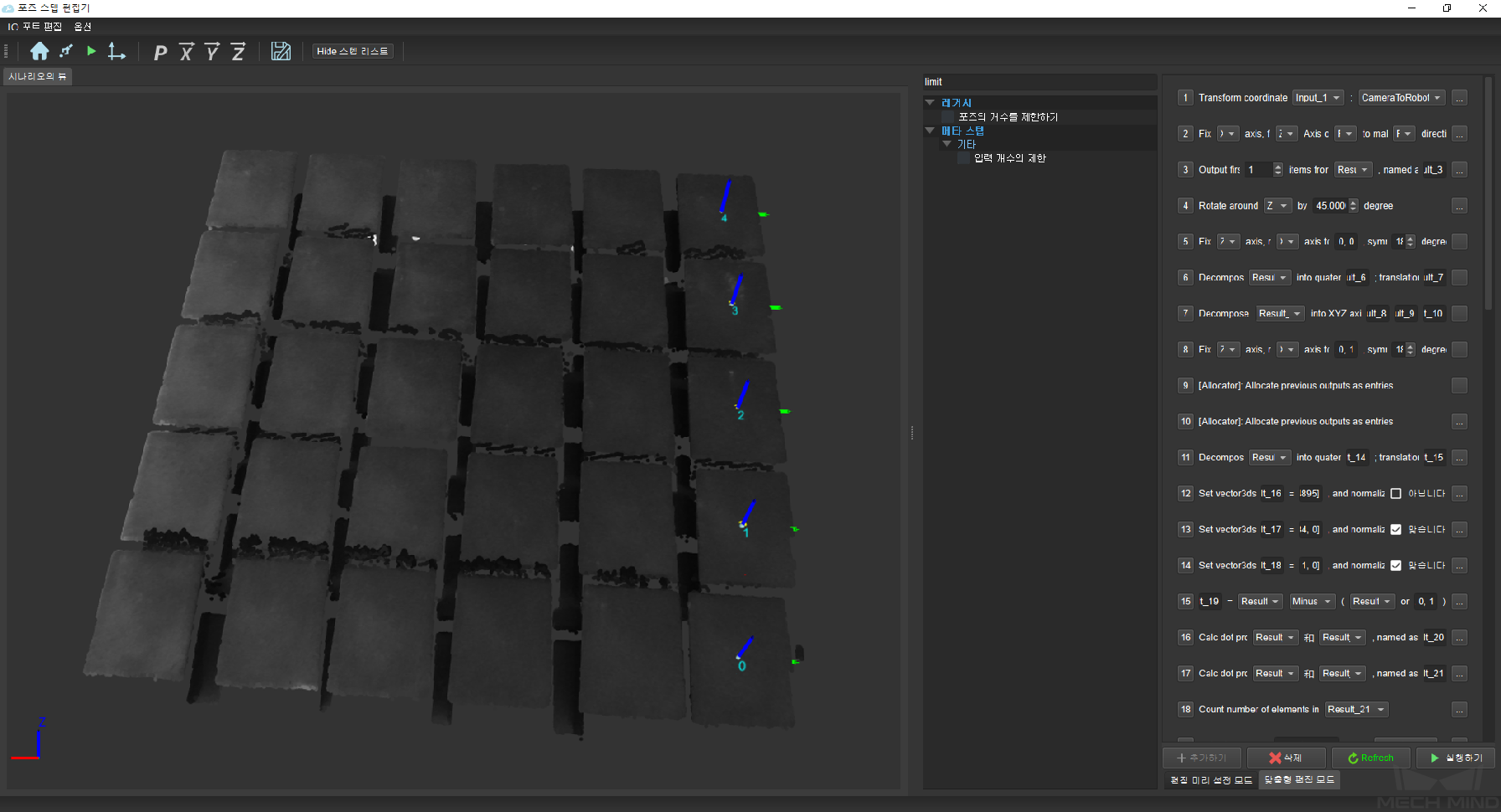
그림9 자체 정의 모드에서 포즈 편집하기¶
스텝5. 포즈 편집이 완료되면 종료 버튼을 누릅니다. 그림10과 같이 편집된 포즈를 저장합니다.
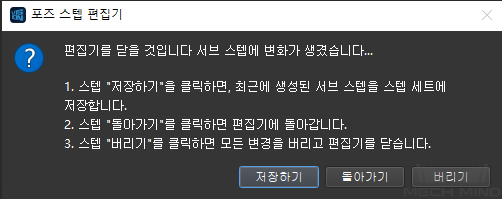
그림10 종료하고 저장하기¶
스텝6. 프로젝트를 실행하고 프로젝트 결과를 빠르게 살펴봅니다.