포즈의 축을 지정된 방향으로 가리키도록 회전하기¶
기능 설명
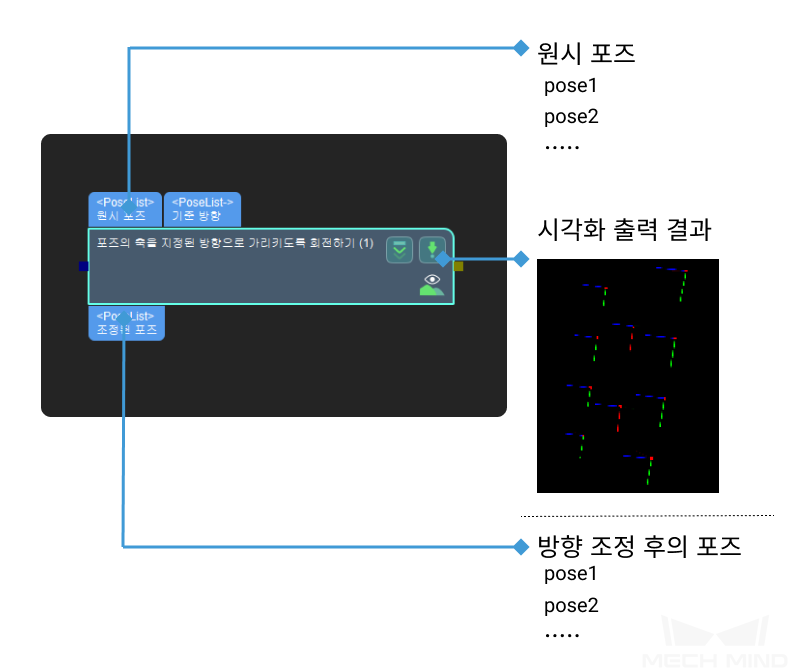
포즈의 축이 설정된 기준 방향을 가리키도록 조정합니다.
응용 시나리오
포즈 방향을 조정해야 하는 시나리오에 많이 사용됩니다.
이 스텝은 구버전이라 물체 대칭성에 근거하여 포즈를 회전시키려면(해당 스텝에서 파라미터 “교정 방법”을 “ROTATION”으로 설정해야 함) 새로운 버전의 스텝 목표 방향으로 포즈를 회전하기(대칭성 제약) 및 3D 벡터를 빠르게 만들기 를 같이 사용하세요.
입력 및 출력
파라미터 설명
- 방법 선택
교정 방법
HARD_RECTIFY:기본값. 두 번째로 입력할 것이 있고(참고 포즈), useFirstRefPose를 선택하면 기준 방향은 첫 번째 참고 포즈가 대응하는 축 유형의 방향입니다; 그렇지 않으면 모든 참고 포즈가 대응하는 축 유형을 기준 방향으로 사용할 것입니다. 참고 포즈를 입력하지 않으면 reference Dir로 참고 방향을 결정할 것입니다.ROTATION:물체의 대칭성에 따라 교정할 회전 축이 지정된 참고 축의 방향이 대략적으로 일치하도록 대칭 각도를 설정합니다.
- 축의 설정
조정할 축
설명: 교정할 회전 축입니다.값 리스트: X;Y;Z(기본값)
- 기준 방향(Reference Dir)
x
기본값: 0.설명: 참고 축 x의 방향 벡터입니다.y
기본값: 0.설명: 참고 축 y의 방향 벡터입니다.z
기본값: 1.설명: 참고 축 z의 방향 벡터입니다.
일반적인 사용법
물체 포즈의 어떤 축의 방향을 고정하는 데 사용됩니다. 예를 들어 정방형 물체 표면의 x 축 방향은 무작위로 지정하는데 일부 로봇의 협각이 회전할 수 없어 픽 포인트에 도달할 수 없습니다.