포즈 좌표축의 방향을 뒤집기¶
기능 설명
정해진 방향에 따라 입력된 포즈의 축 방향을 조정합니다.
응용 시나리오
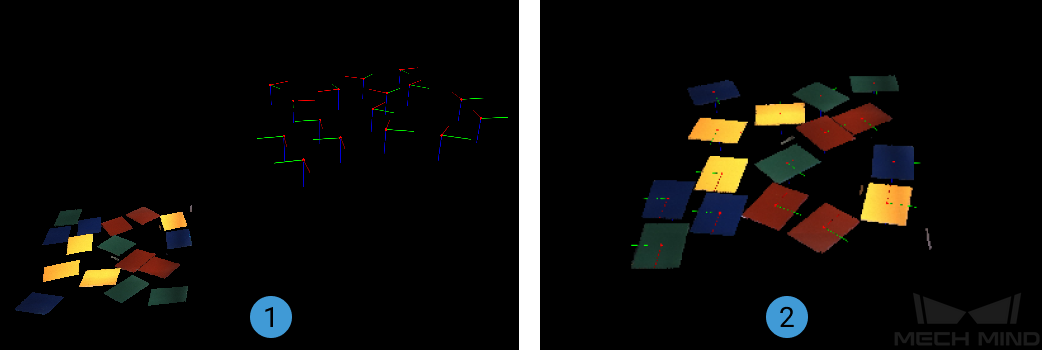
일반적으로 포즈 후속 처리 단계에 사용되고 모든 포즈의 어떤 좌표축 지향을 동일하게 만듭니다.
입력 및 출력
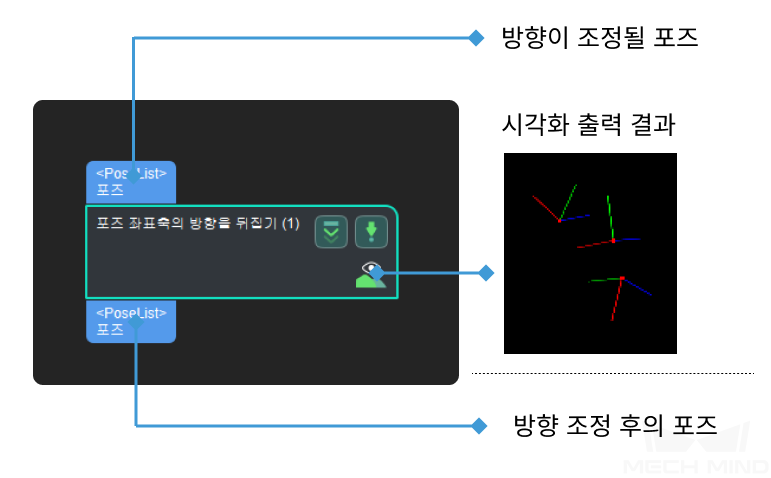
파라미터 설명
시각화 설정
- 선택한 좌표축 아래에 포인트 클라우드 표시
- 포즈 표시 설정
좌표축 설정
- 뒤집기가 필요한 축 유형
- 방향 유형
- 회전기준축
힌트
뒤집어야 하는 축과 회전기준축이 동일한 축이 될 수 없습니다.
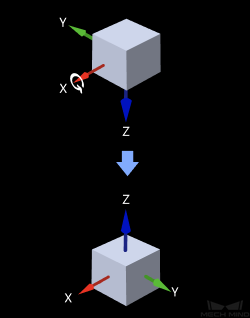
조정 예시
여기서 Z축을 뒤집어야 하는 축으로 하고, X축을 회전축으로 하는 경우는 다음 그림과 같습니다.
