로봇 모델 추가 및 실제 로봇과 연결하기¶
실제 로봇과 연결하려면 Mech-Viz에서 새로운 프로젝트를 만들어 로봇 모델을 로드하고 로봇 모델에 따라 소프트웨어 및 로봇 간의 통신을 구축해야 합니다.
Mech-Viz는 본사에서 자체 연구·개발한 산업용 로봇 그래픽 프로그래밍 스프트웨어로 사용자가 이를 통해 로봇에 대한 원격 컨트롤, 시각화 시뮬레이션 및 운동 트랙 계획 등을 실현할 수 있습니다.
로봇 모델을 추가하기¶
아미콘을 더블 클릭하여 Mech-Viz라는 소프트웨어를 열어서 화면 상단에 있는 현재 프로잭트 자동 로드하기 를 선택하세요.

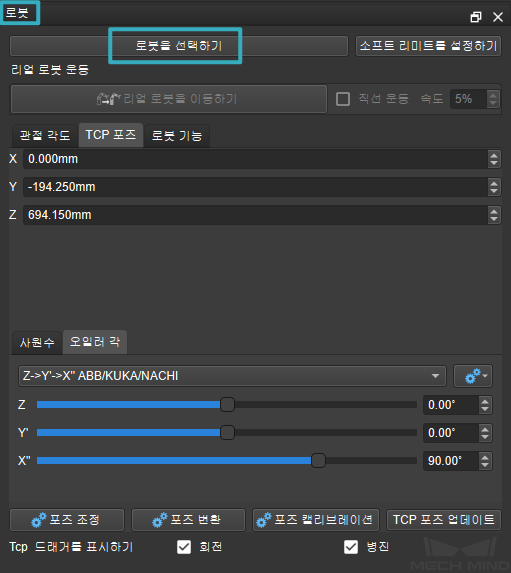
오른쪽 하단에 있는 로봇 을 선택하고 로봇을 구성하기 를 클릭하여 로봇 선택 화면에 들어갑니다.
이번 종이 박스 피킹 프로젝트는 UR_3 로봇을 사용하므로 UR_3 를 선택하여 확인하면 됩니다.
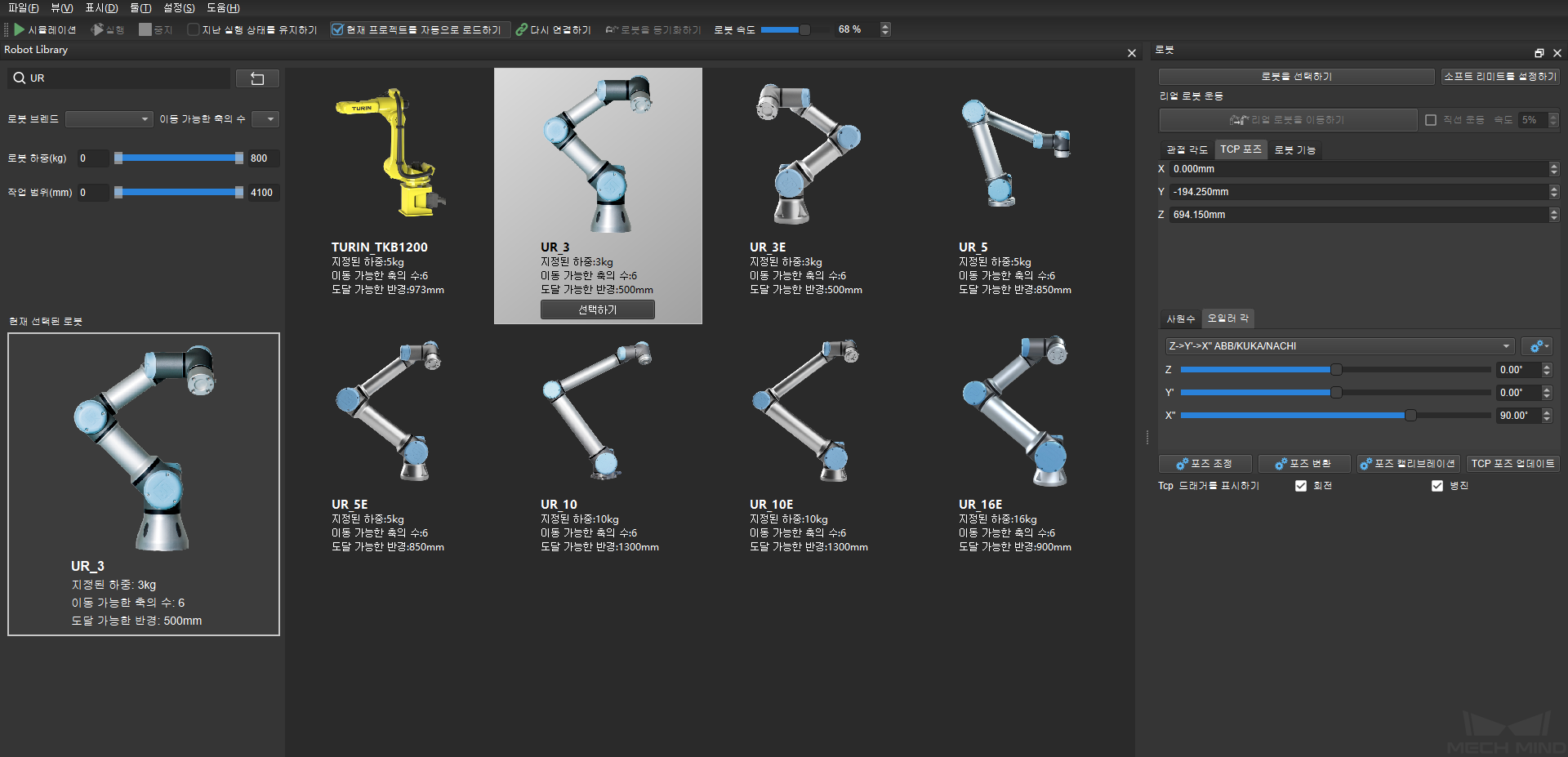
사용자는 대응하는 로봇 브랜드와 사이즈를 선택하면 됩니다
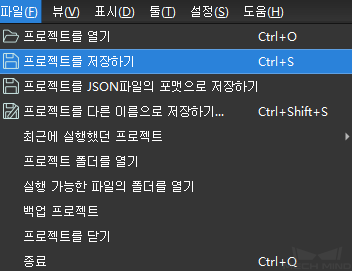
화면 왼쪽 상단에 있는 프로젝트 저장 을 클릭하여 프로젝트를 로컬로 저장합니다.
실제 로봇과 연결하기¶
Mech-Center 메인 인터페이스로 돌아가 상단에 있는 메인 컨트롤 로봇 버튼을 누르세요.

Mech-Center 화면 오른쪽애 있는 로그에 로봇 연결 성공 가 나오면 실제 로봇은 이미 연결된다는 뜻입니다. 그리고 화면 상단에 제시한 서비스 상태 중도 로봇을 연결된다는 표시를 볼 수 있습니다.
로봇 모델 추가 및 실제 로봇 연결이 완성됩니다. 지속으로 다음 부분을 살펴보세요.