Communication Mode Selection¶
In actual deployment, you usually need to collect the functional requirements, communication objects and communication protocols of the project first, and then determine the communication mode according to them.
The following figure shows the procedure of selecting the communication mode.
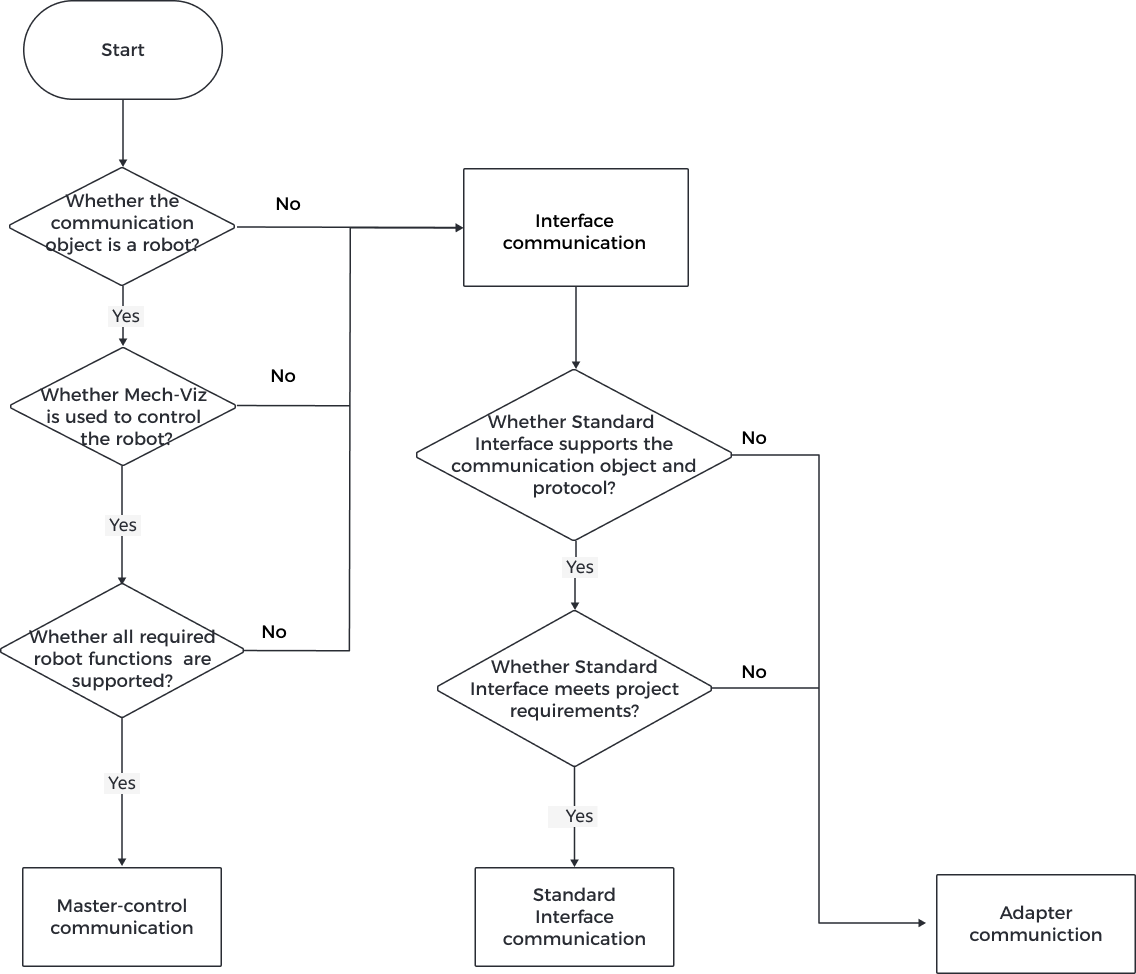
When selecting the communication mode, determine whether to use master-control communication or interface communication first. If you need to use interface communication, further determine whether to use Standard Interface communication or Adapter communication.
The procedure of determining whether to use master-control communication or interface communication is as follows:
Determine whether the communication object is a robot.
If yes, proceed to the next step;
If no, use interface communication.
Determine whether the project requires that Mech-Viz should be used to control the robot.
If yes, proceed to the next step;
If no, use interface communication.
Determine whether the master-control communication mode supports all the robot functions required by the project, such as robot returning the same way after collision.
If yes, use master-control communication;
If no, use interface communication.
The procedure of determining whether to use Standard Interface communication or Adapter communication is as follows:
Determine whether Standard Interface communication supports the communication objects and communication protocols of the project.
If yes, proceed to the next step;
If no, use Adapter communication.
Determine whether Standard Interface communication meets the functional requirements of the project.
If yes, use Standard Interface communication;
If no, use Adapter communication.