トレニンーグに必要なデータを取得する¶
データ取得環境を整備する¶
詳しくは、 インスタンスセグメンテーション:データ取得環境を整備 をご参照ください。
注意
画像分類では 照明 が大事なので、安定した照明を確保する必要があります。照明が変動する現場では、状況に応じて個別に取得してください。
取得する画像枚数¶
各カテゴリの物体に対して約20枚の画像を取得します。
取得時の物体姿勢¶
取得の要件に応じて様々な放置姿勢の物体に対して画像を取得する必要があります。たとえば、実際の生産現場では、供給されるワークには水平方向と垂直方向があるとします。水平方向のデータのみを取得してトレニンーグすれば、垂直方向のワークの分類効果を保証できません。なので、データを取得するときは、 実際生産の様々なシーンを含める 必要があります。詳細は以下に示します。
取得した画像データに、実際の応用シーンにありうる対象物の 異なる角度 が含まれるようにしてください。
取得した画像データに、実際の応用シーンにありうる対象物の 異なる位置 が含まれるようにしてください。

Mech-Visionを使用してデータを取得する¶
上記の取得環境、取得数、取得時の物体姿勢を確認した上で、Mech-Visionを使用してデータを取得する をご参照ください。
プロジェクトにおけるデータ取得の実例¶
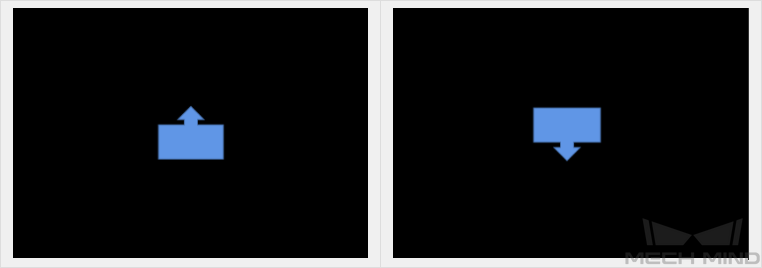
あるバルブチューブのプロジェクトでは、単一種類の物体を認識します。バルブチューブの位置移動が小さく、正面と背面を区別する必要があり、それぞれ10枚を取得します。
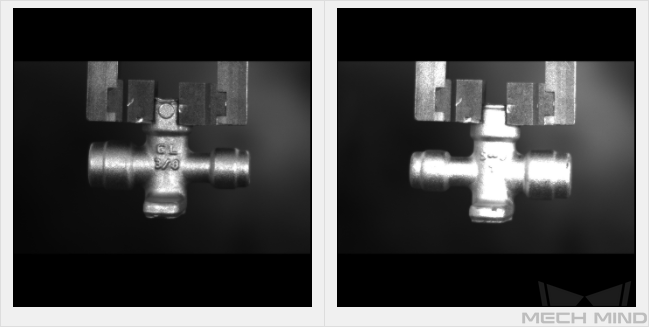
前面 / 背面¶
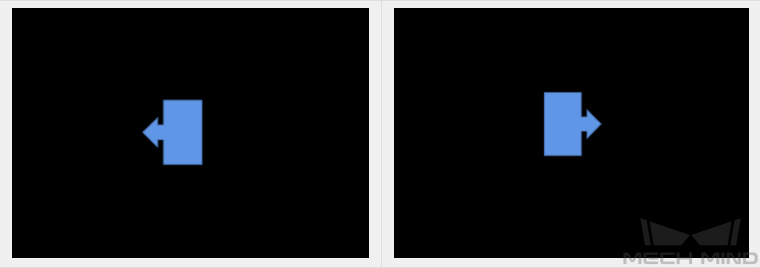
あるエンジンバルブアセンブリのプロジェクトでは、単一種類の物体を認識します。ワークがスロット外に配置されれば、様々な姿勢がありうるので、約20枚の画像を取得します。スロット内に正確に配置された場合はワークの配置位置が異なる画像を約10枚取得します。
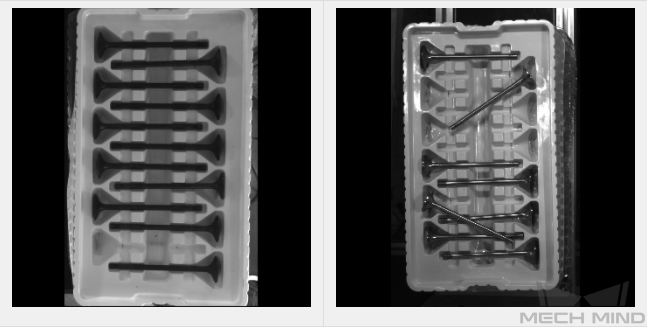
スロット内 / スロット外¶
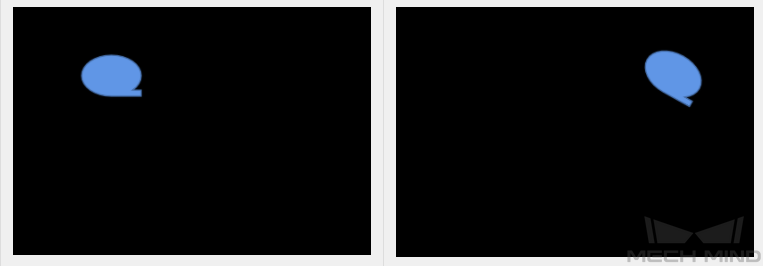
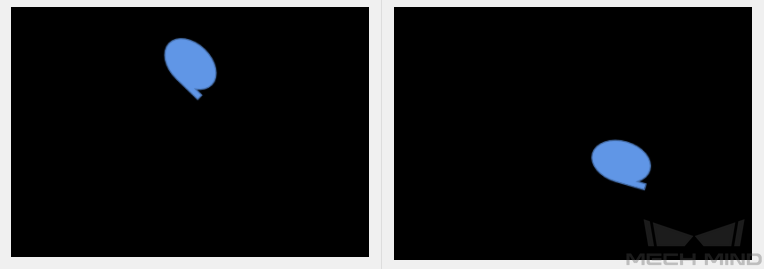
ある金属フレークのプロジェクトでは、2種類の物体を認識します。サイズと位置、角度を区別する必要があるので、正面と背面の画像をそれぞれ20枚取得します。
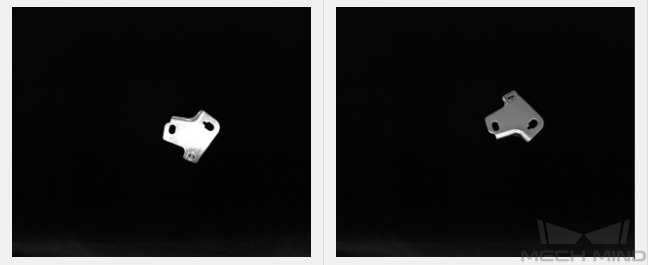
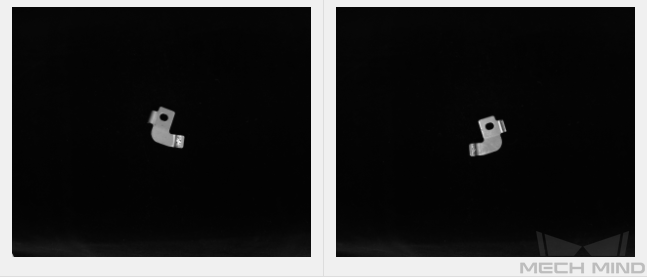
前面 / 背面¶