トレニンーグに必要なデータを取得する¶
注意
ディープラーニングプロジェクトでは、最も重要なのはデータの取得です。モデルの最終的な効果は、トレーニング済みデータの品質に大きく依存します。高品質のデータセットを使用すれば、モデルトレーニングの品質と予測精度を向上させることができます。
データ取得環境を整備する¶
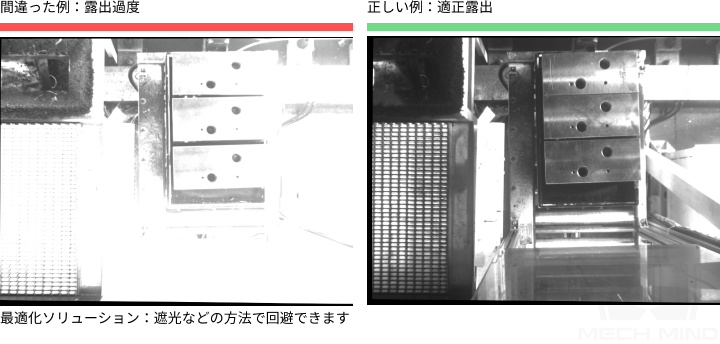
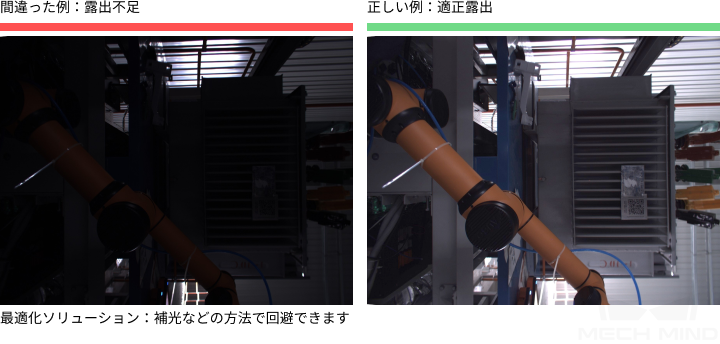
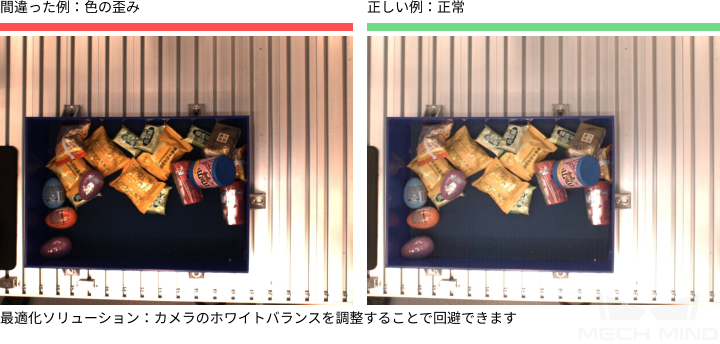
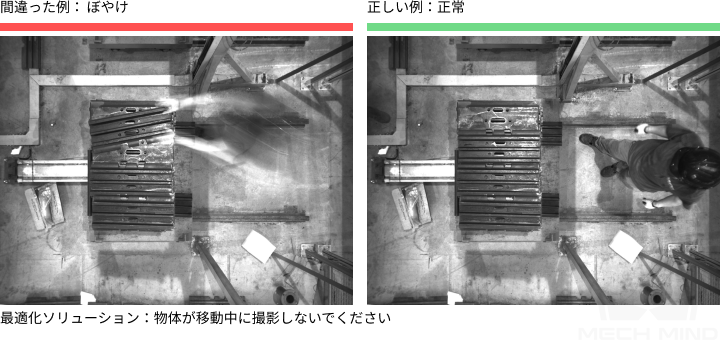
露出過度、露出不足、色ずれ、ぼやけ、遮蔽 などを避けてください。これらが発生したら、ディープラーニング・モデルに必要な特性がなくなり、モデルの効果に差し支えます。
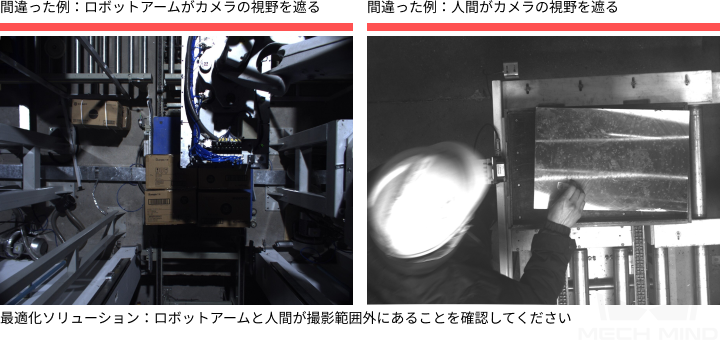
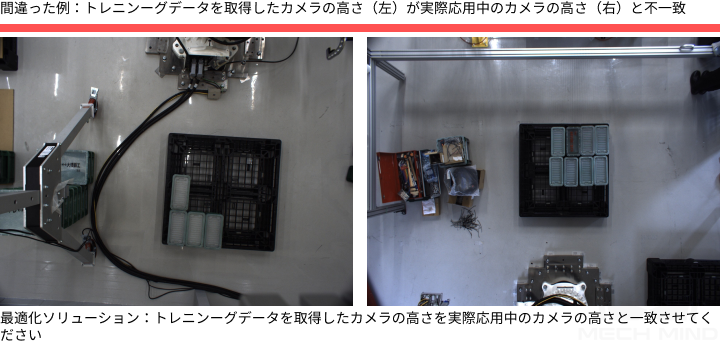
取得するデータの 背景、視角、高さ が実際の応用と一致するようにしてください。いかなるズレがあっても、実際応用のディープラーニングの効果が低下し、改めてデータを取得しなければならないこともあります。したがって、必ず事前に実際応用の状況をご確認ください。


取得する画像枚数¶
対象物が単一種類である場合、約50枚画像を取得します。
対象物が多種類ある場合、各種類に対して約 30 枚を取得します。取得合計数は、「30 * 種類」です。
上記は一般的な数で、業界の代表的な応用ではより詳細な基準があります。詳しくは、 代表的なプロジェクトのデータ取得の実例 をご参照ください。
注意
トレーニングデータが少なすぎると、モデルに必要なサンプルは足りません。それに基づいてフィッチングされたデータを使用すれば、ディープラーニングモデルを効果的にトレーニングすることができなく、テストのエラー発生率も高くなります。一方、データが多すぎると、トレーニングの速度が遅くなります。以上のことから、必ず適切に取得してください。
取得時の物体姿勢¶
物体の様々な配置状況に対して、取得要件に応じて合理的に取得する必要があります。たとえば、生産現場では、供給するワークは水平方向と垂直方向があるとします。水平方向のデータだけを取得してトレーニングすれば、垂直方向のワークに対する認識効果は保証できません。また、単一ワークのデータだけを取得すれば、積み重ねられて遮蔽されたワークに対する認識効果も保証できません。なので、データを取得するときは、 実際の生産現場の様々なシーンを含める 必要があります。詳しくは:
取得したデータに、実際の応用シーンにありうる 物体の向き が含まれていることを確認してください。
取得したデータに、実際の応用シーンにありうる 物体の位置 が含まれていることを確認してください。
取得したデータに、実際の応用シーンにありうる 物体間の関係 が含まれていることを確認してください。
注意
ある状況の取得が脱落したら、その状況のディープラーニングは実行できず、認識することもできません。エラー発生率を下げるために状況に応じてデータサンプルを追加してください。
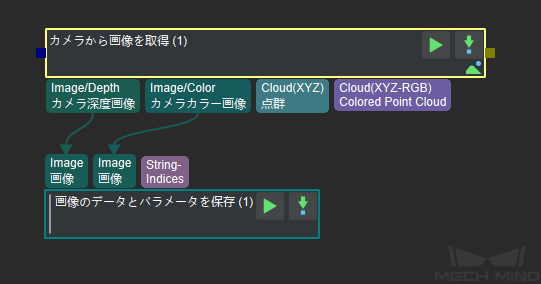
Mech-Visionを使用してデータを取得する¶
上記の取得環境、取得数、取得時の物体配置状況を確認した後、Mech-Visionで下図に示すプロシージャを構築してデータを取得できます。ステップの使用については、 capture_images_from_camera をご参照ください。
プロジェクトにおけるデータ取得の実例¶
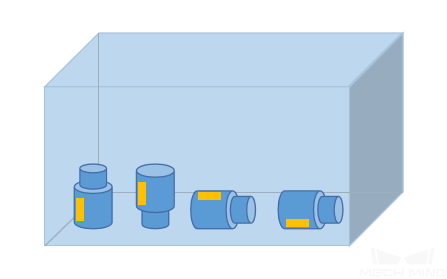
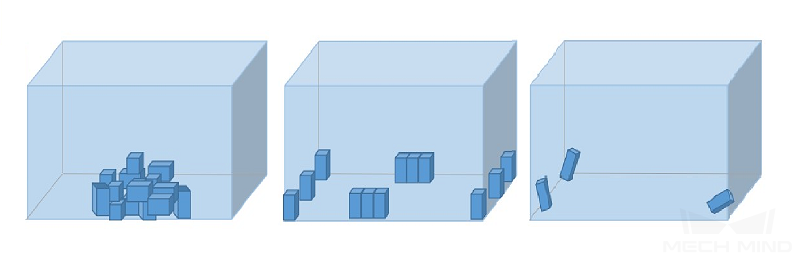
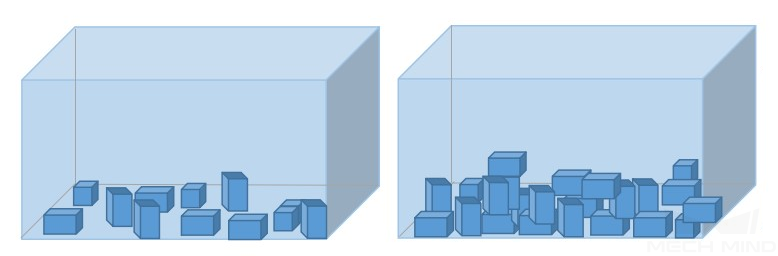
ある金属部品のプロジェクトでは、対象物は単一種類なので、画像を50枚取得します。物体の向きについては、平らに放置しているものもあれば、横に立っているものもありますので、取得するときにこれを考慮に入れます。物体の位置については、ボックスの中央、端、コーナーにある状況や高さも考慮する必要があります。物体間の関係については、積み重ねる状況に加えて、一部が平行に並んでいる状況を考慮する必要があります。実際に取得された画像は以下のとおりです。
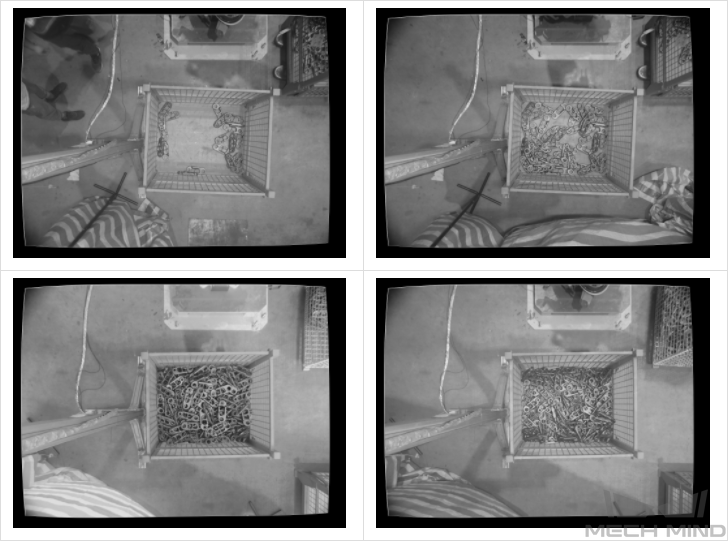
少量のバラ積み物体(左上)/ 集中のバラ積み物体(右上)/ 積み重ねる物体(左下) / 集中のバラ積み物体(右下)¶

平らに放置 / 横に立っている / 積み込める / 並んで放置¶
ある日用品プロジェクトでは、7種類の物体があって、これらを分類します。物体特性のデータを完全に取得するには、「単一種類の物体が異なる向きに配置される」と「複数種類の物体が混合配置される」の状況を考慮する必要があります。単一種類物体の画像を取得する際、取得枚数は「5 * 種類数」です。複数種類の物体の画像を取得する際、取得枚数は「20 * 種類数」です。物体の向きについては、平らに配置され、横に立ち、傾いているという姿勢があり、取得するときはいちいち考慮する必要があります。物体の位置については、ボックスの中央、端、コーナーにある状況も全部考慮します。物体間の関係については、積み重ねのほかに、平行に並んでいる、密接するなども考慮する必要があります。実際に取得された画像は以下の通りです。
単独放置:

ボックスのコーナーにある(左上)/ 密接(右上) / 密に積み込まれ(左下)/ 少量のバラ積み物体(右下)¶
混合放置:

密に積み込まれ / ボックスのコーナーにある / バラ積み¶
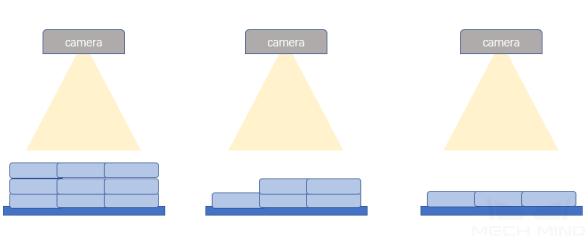
あるトラックシューズのプロジェクトでは、複数型番の部品があるため、画像の取得枚数は「30*型番の数」です。物体の向きについては、正面が上向き状況のみを考慮します。物体の位置については、配置方式は同じく、高・中・低層の画像データをそれぞれ取得する必要があります。物体間の関係については、規則的に配置されいるため、密接した部品に注意を払う必要があります。実際に取得された画像は以下の通りです。
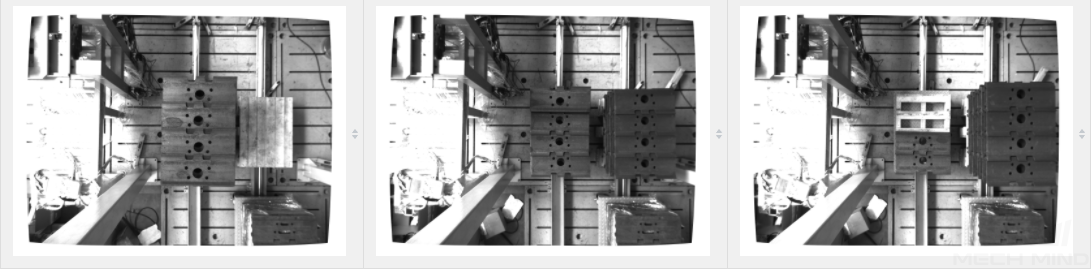
異なる高度の視野(高、中、低)¶
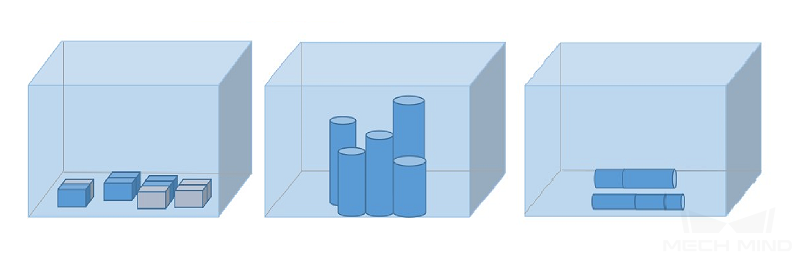
ある金属部品のプロジェクトでは、部品が一層に並んでいるので、50枚の画像を取得します。物体の向きについては、正面が上向きの画像だけを取得します。物体の位置については、ボックスの中央、端、コーナーに位置する画像を取得します。物体間の関係については、密接した状況を考慮する必要があります。実際に取得された画像は以下の通りです
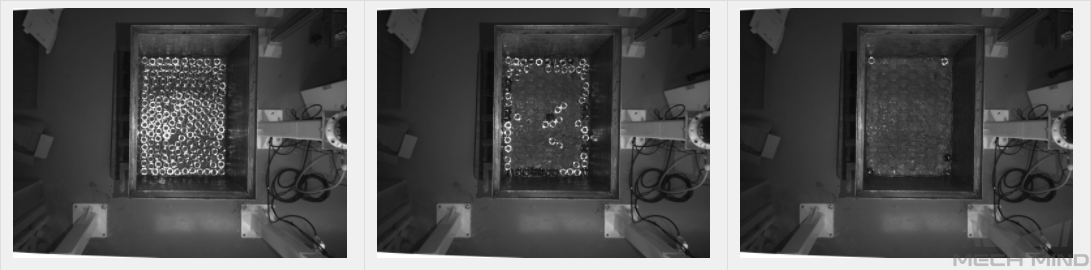
段ごと / ボックスの端にある / ボックスのコーナーにある¶
ある金属部品のプロジェクトでは、物体が規則的に多層に積み重ねられているため、30枚の画像を取得します。物体の向きについては、正面が上向きの状況だけを考慮する必要があります。物体の位置については、ボックスの中央、端、コーナーに位置する画像と高・中・低層の画像を取得します。物体間の関係については、密接した状況を考慮する必要があります。実際に取得された画像は以下の通りです。
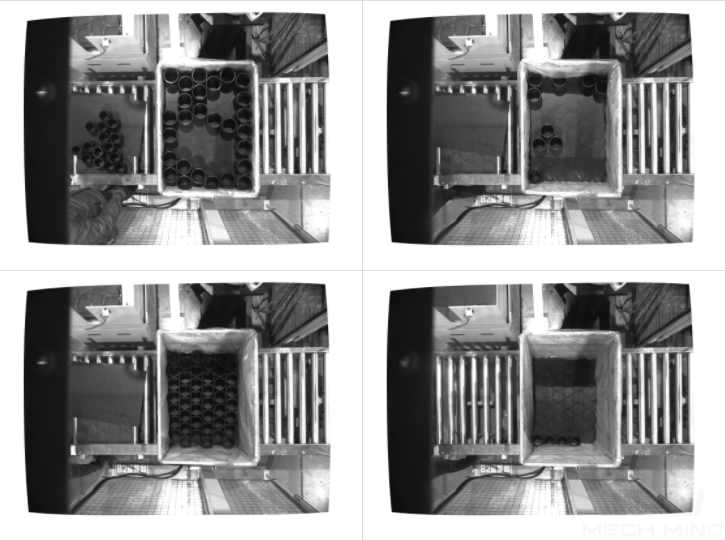
高層にある(左上) / 少量で高層にある(右上) / 低層にある段ごと(左下) / ボックスの端にある(右下)¶