深度图与点云常用参数调节¶
调节深度图与点云时所需要的参数如下所示:
3D参数¶
包含 曝光次数 与 曝光时间 ,影响 用于计算深度数据的图像 ,从而影响深度图及点云质量。
曝光次数¶
设置曝光时间的个数。曝光次数大于 1 时,需设置多个曝光时间。
在不同曝光时间下分别拍摄,通过融合所有图像来计算深度。增加曝光次数可提升深度数据的完整性,但处理时间变长。
值: 1~3。
曝光时间¶
设置采集深度信息时的曝光时间,需根据曝光次数分别设置曝光时间。
深色物体通常使用较长曝光时间,浅色物体通常使用较短曝光时间。
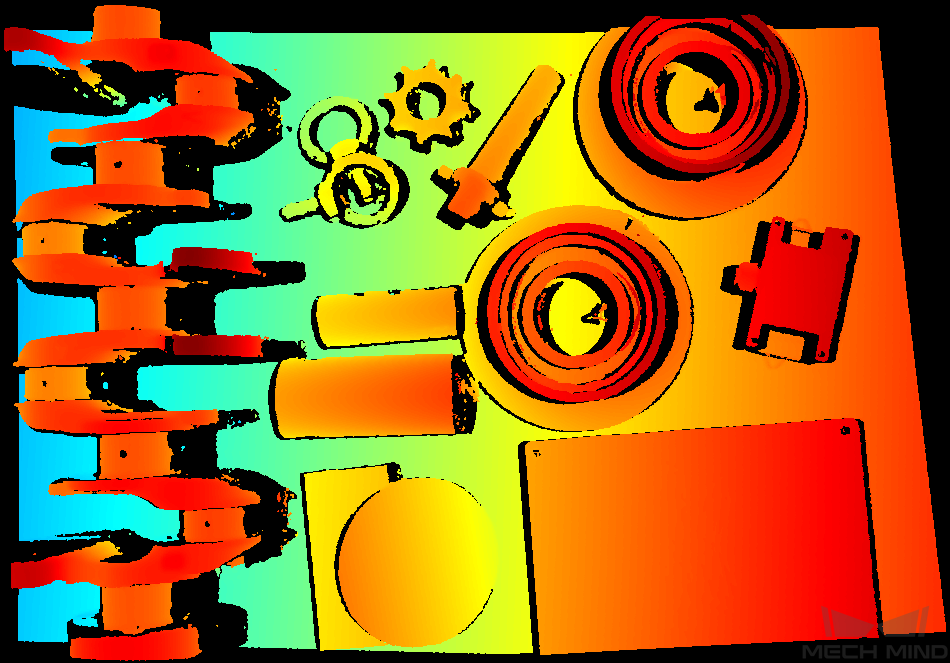
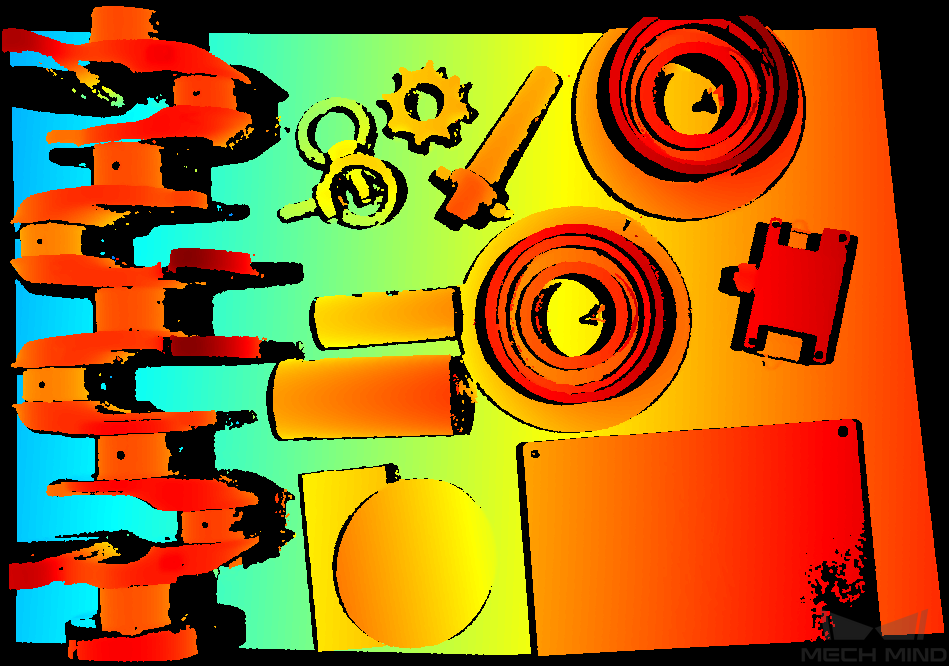
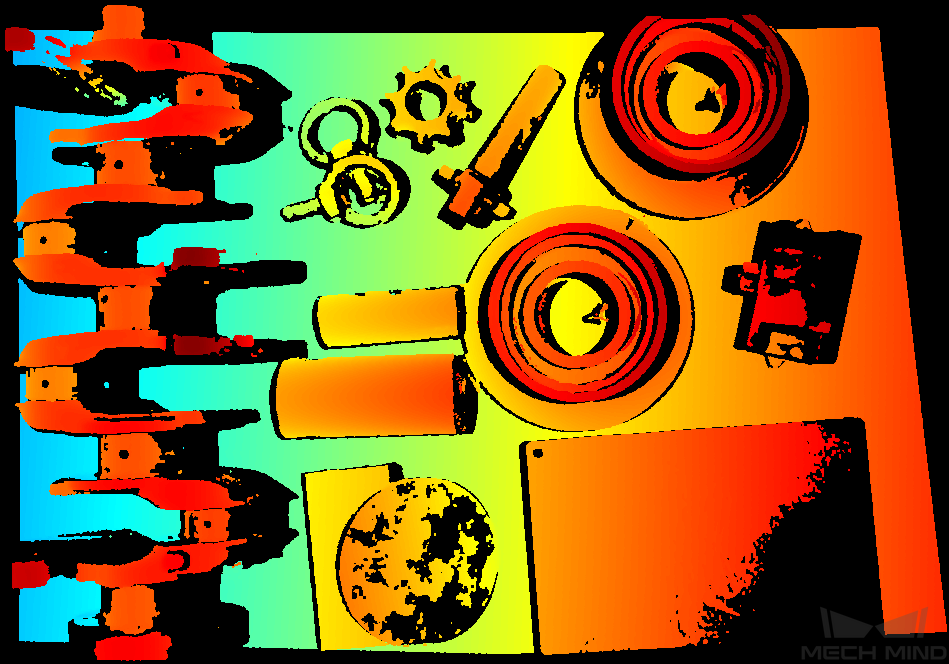
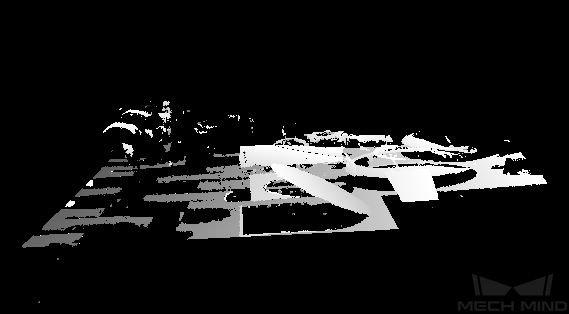
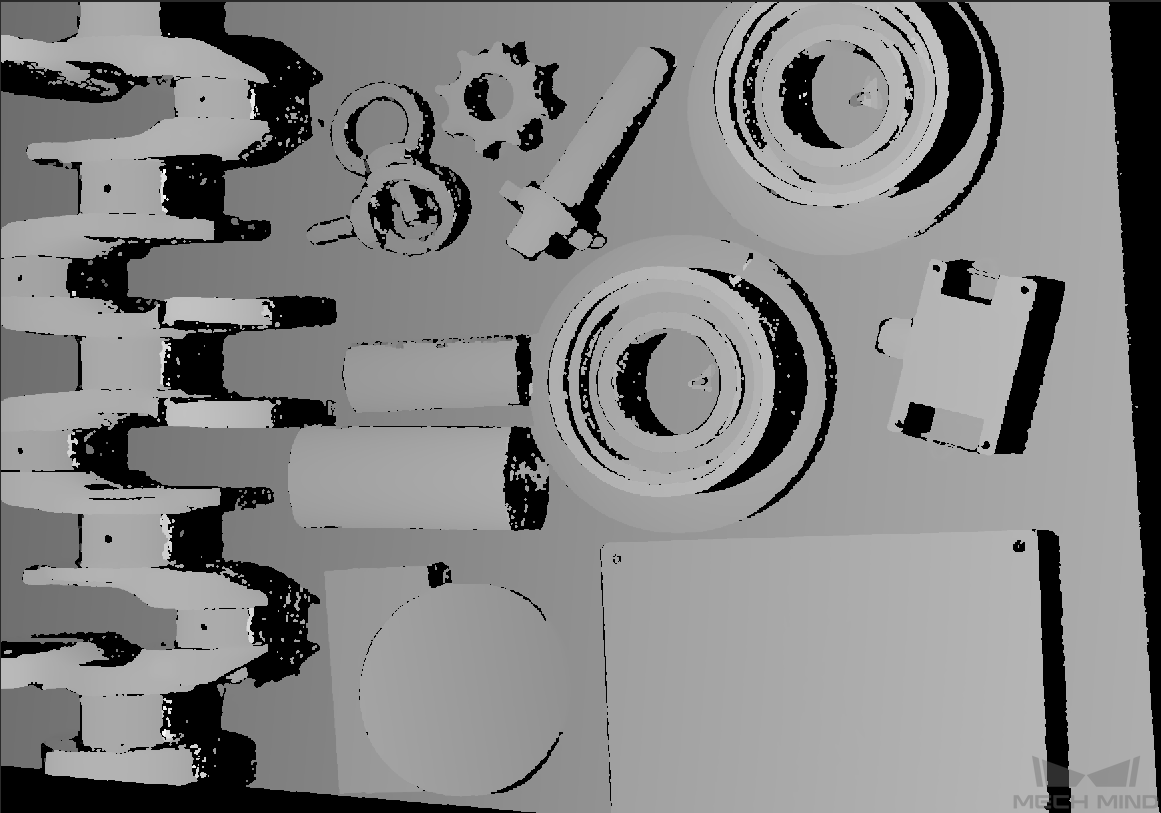
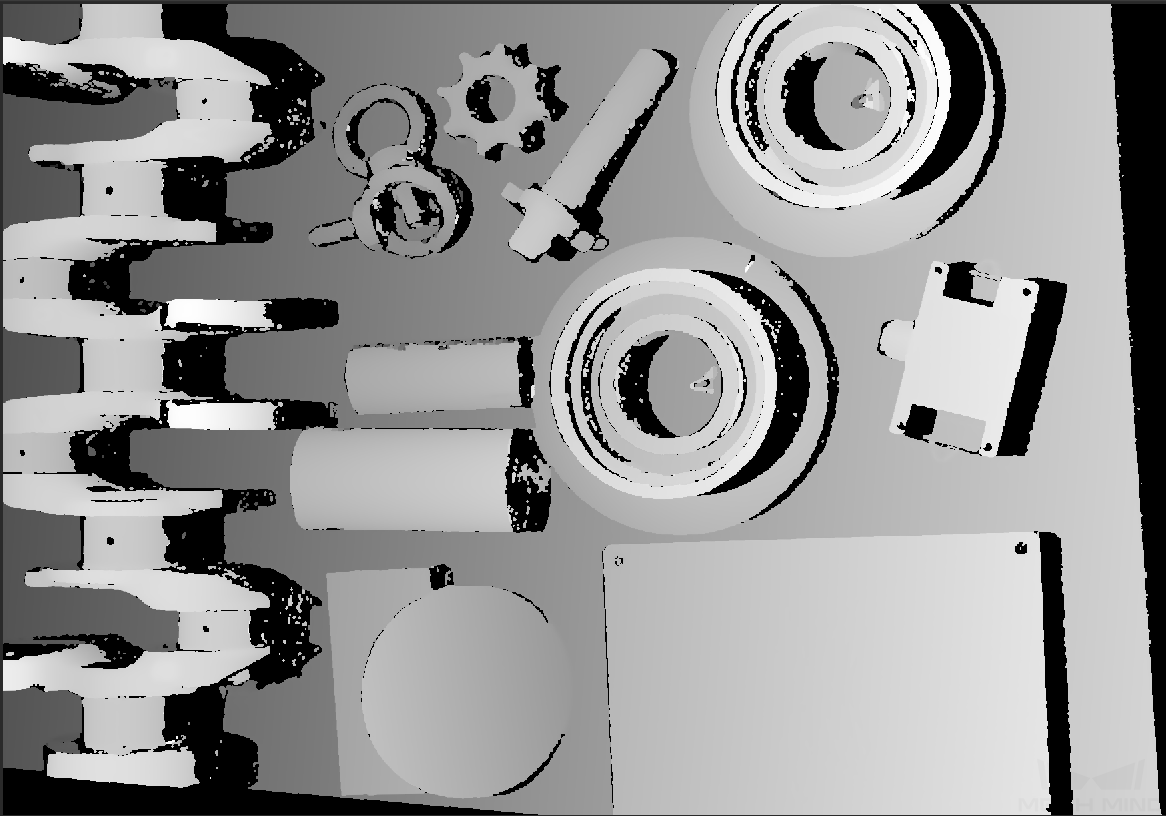
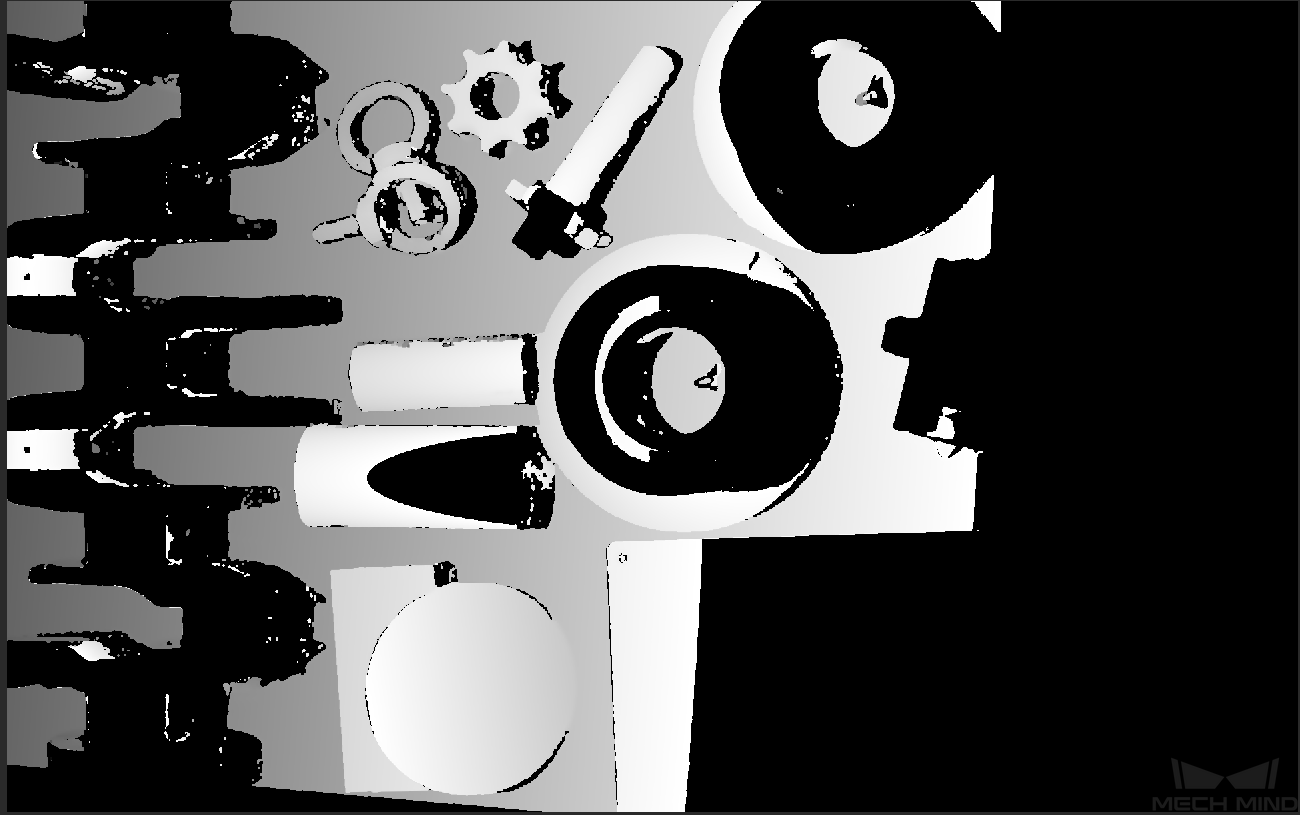
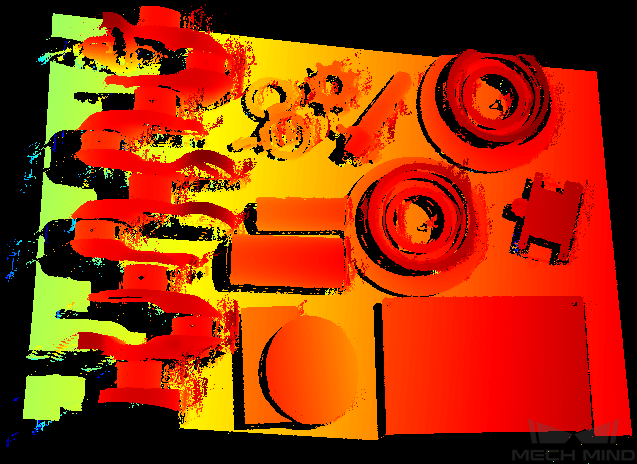
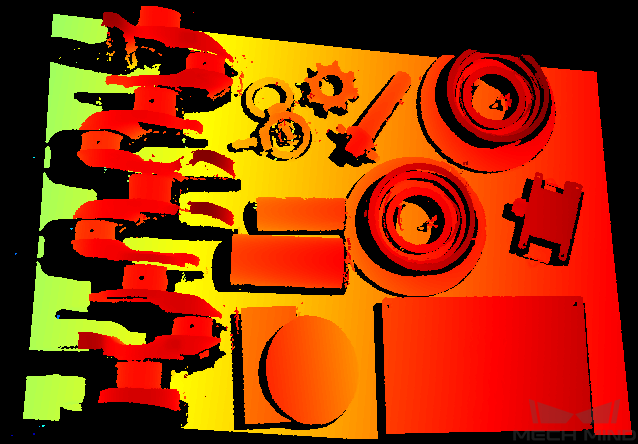
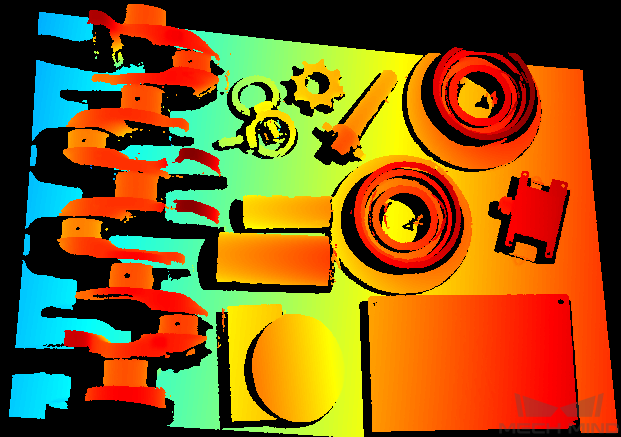
曝光时间过长或过短都会导致信息缺失。不同 曝光时间 对比图如下:
曝光时间 1ms
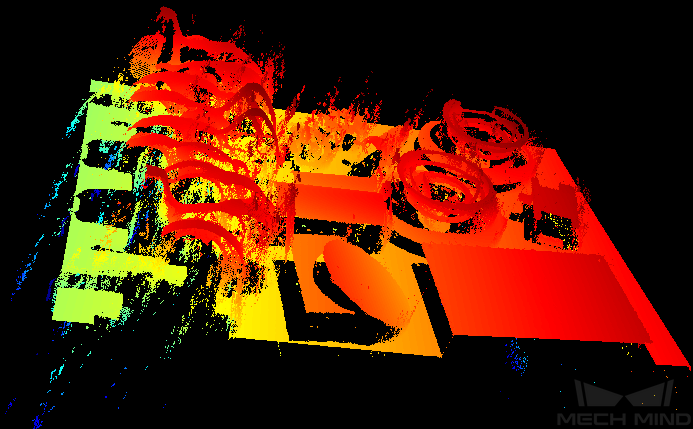
曝光时间 4ms

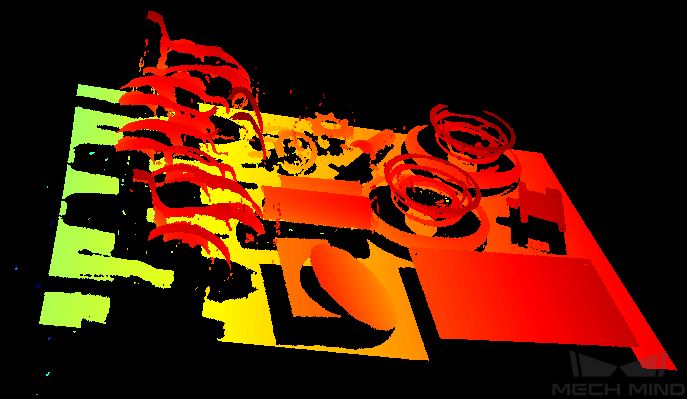
曝光时间 10ms
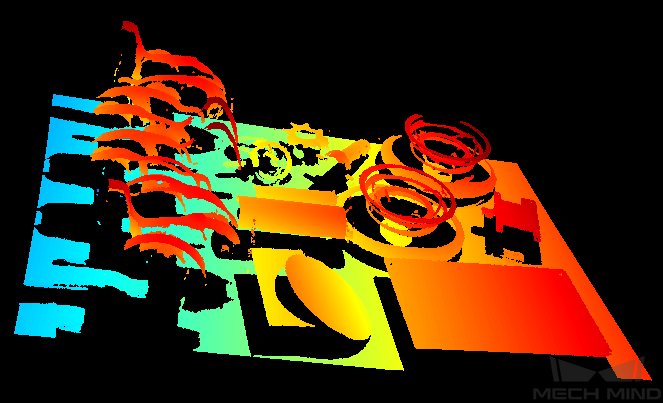
曝光时间 50ms
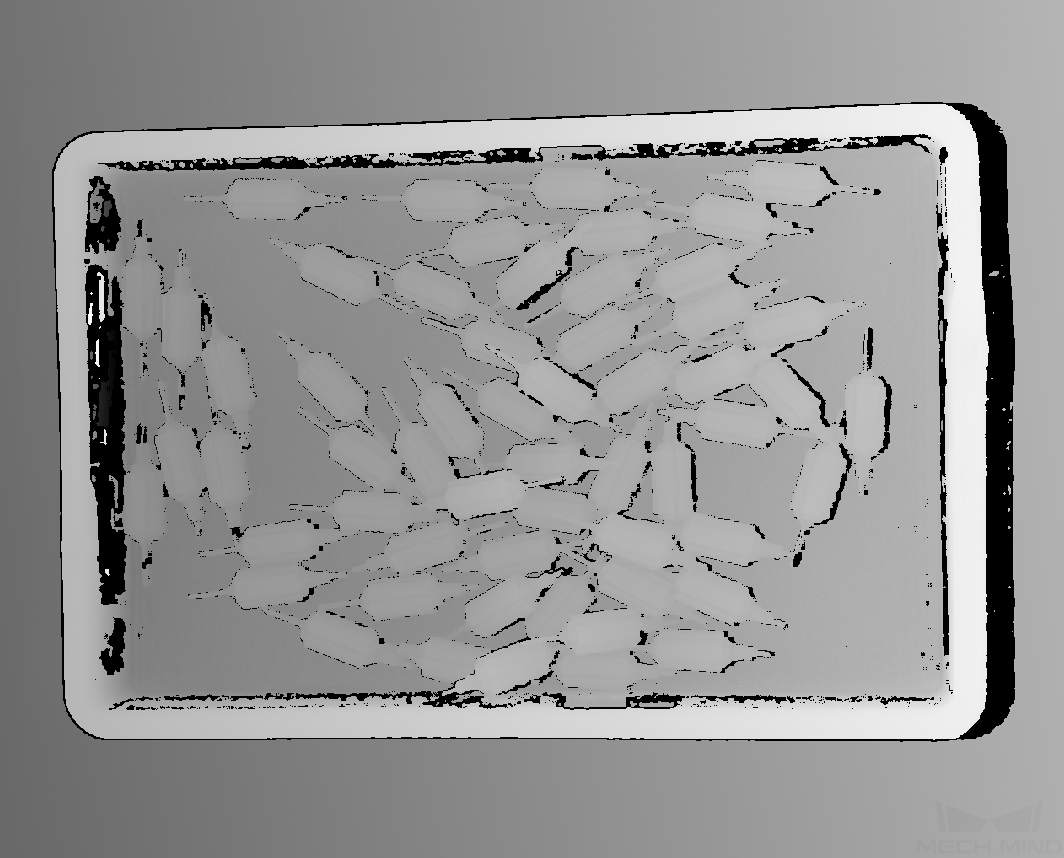
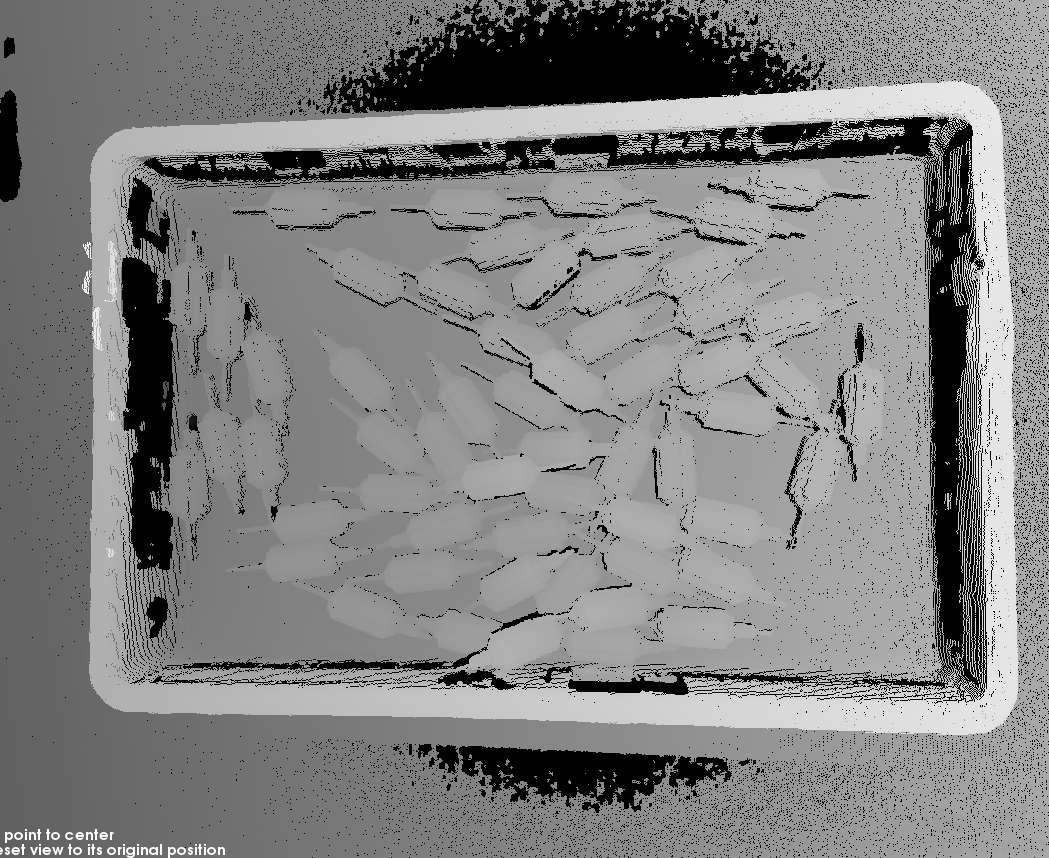
注解
黑色部分缺少对应的物体点云。
曝光次数越多,获取深度图与点云所需要的时间越长。请在保证图像质量的情况下,尽量减少曝光次数。
激光相机的曝光时间须为 4 的倍数,输入值将被自动调整。Laser 系列可设置的最小值为 4ms,其他激光相机可设置的最小值为 8ms。
拍摄模式¶
提示
仅适用于 UHP 系列相机。
设置 UHP 系列相机的拍摄模式。推荐使用 Camera 1 或 Merge 模式。
选项:
选项
说明
Camera1
默认值。使用 Camera1 拍摄。
只有 Camera1 模式支持设置感兴趣区域。
Camera2
使用 Camera2 拍摄。
Merge
同时使用两个 2D 相机拍摄,并通过融合图像生成深度图和点云。
2D 图通过 Camera1 拍摄。
点云后处理¶
调节 点云后处理 可优化点云效果,可通过以下三个参数来调节: 点云平滑 、 噪点去除 及 条纹对比度阈值。
点云平滑¶
该功能可减少点云中的深度波动,使点云更接近真实的物体表面。点云平滑会损失部分物体表面细节。点云平滑强度越高,损失的物体表面细节越多。
选项:
选项
说明
Off
不启用点云平滑功能。
Weak
进行轻微的表面平滑处理,会造成轻微的细节损失。
Normal
进行中等程度的表面平滑处理,会造成一定细节损失。
Strong
进行高等级的表面平滑处理,会造成较多的细节损失。
强度:
Off < Weak < Normal < Strong。强度越高,点云损失越多,细节越模糊。
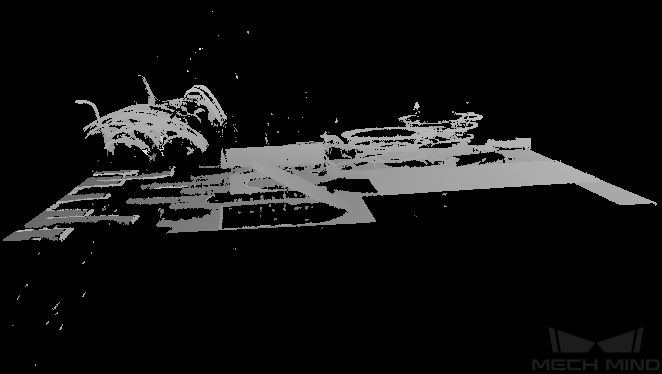
不同 点云平滑 强度效果图对比:
Off
Weak
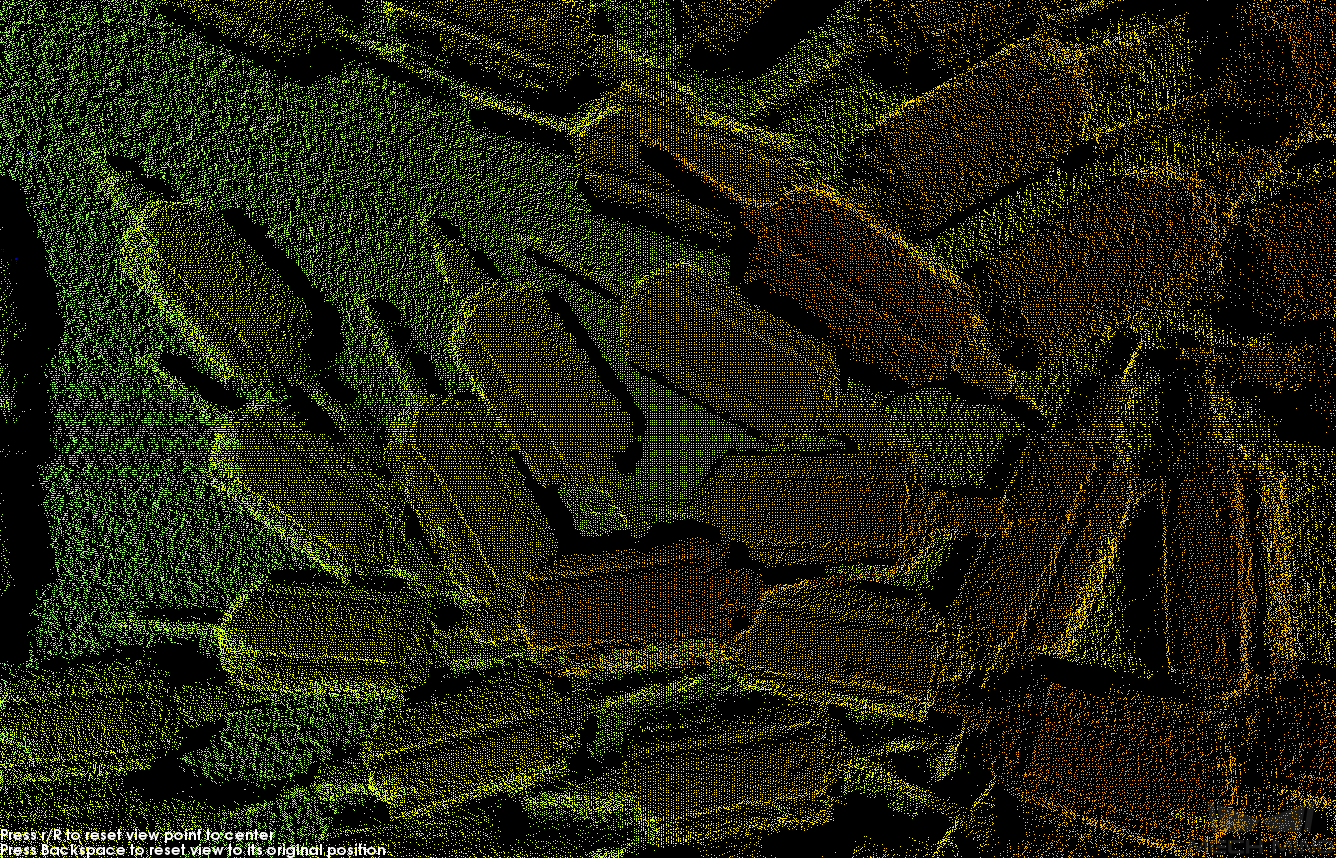
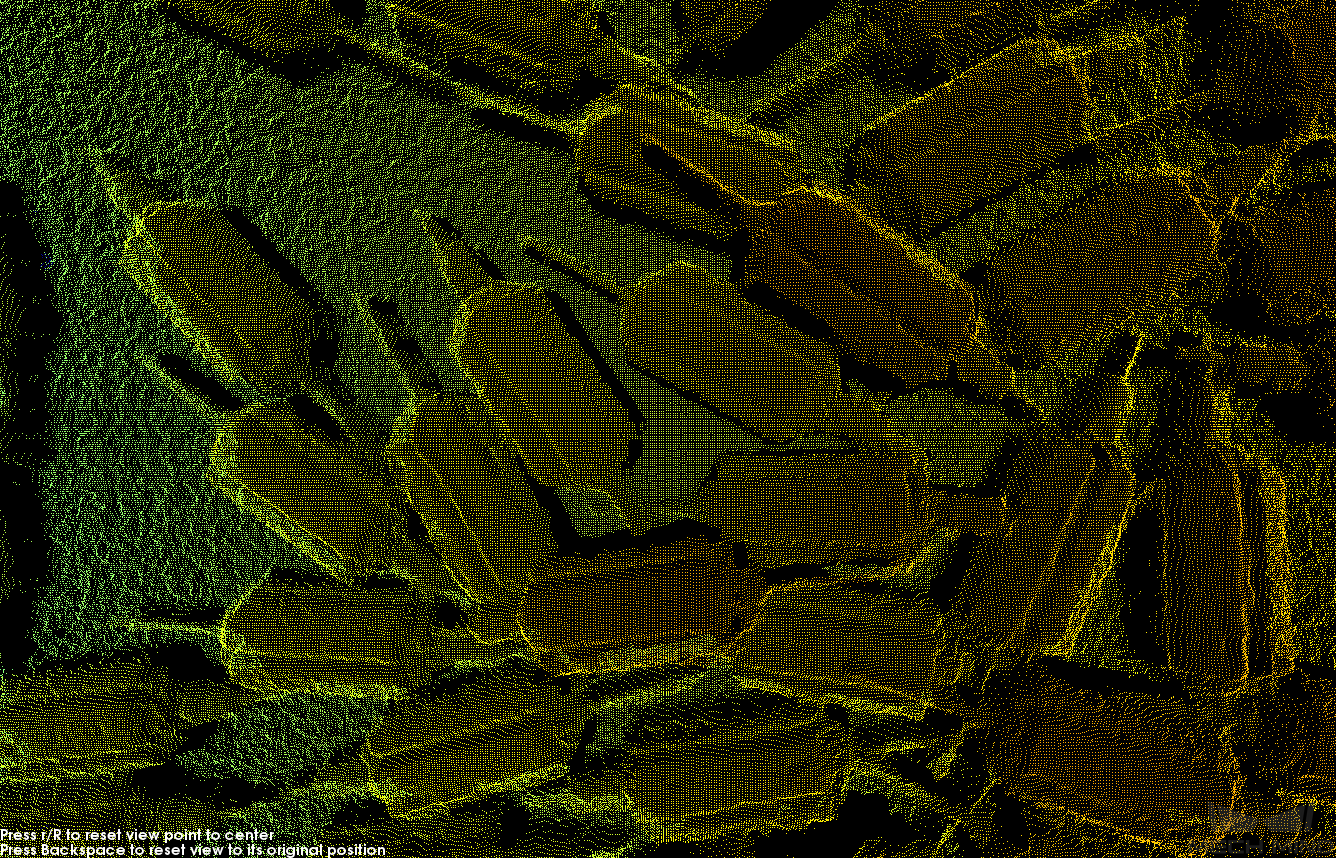
Normal
Strong
噪点去除¶
可减少点云中的噪点,减少对后续计算精度的影响。
选项:
选项
说明
Off
不进行去噪处理,点云存在较多噪点。
Weak
可在保证边缘完整的同时去除大部分噪点。
Normal
去除绝大部分噪点,但可能出现轻微的边缘腐蚀现象。
强度:
Off < Weak < Normal。强度越高,噪点去除越多,但可能导致物体点云损失越多。
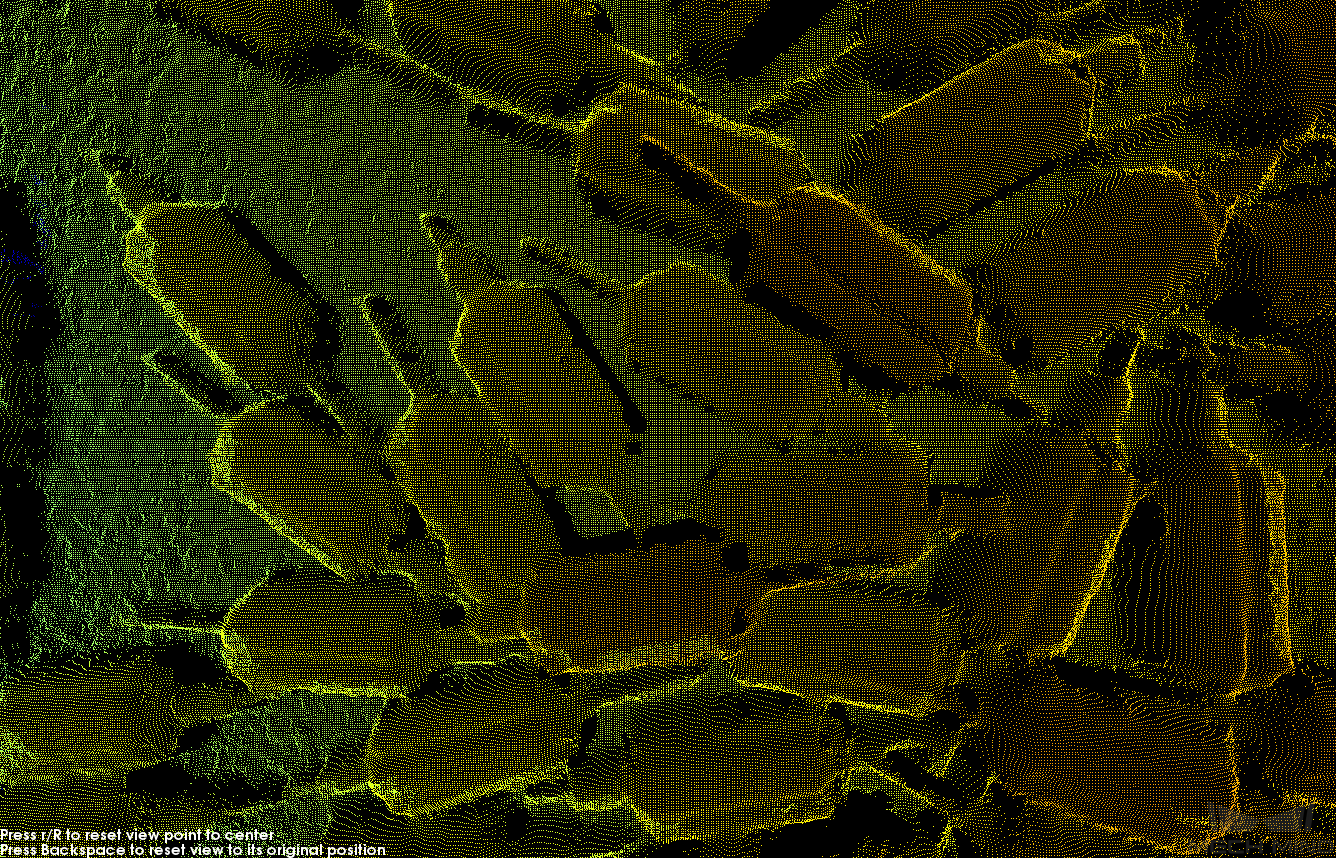
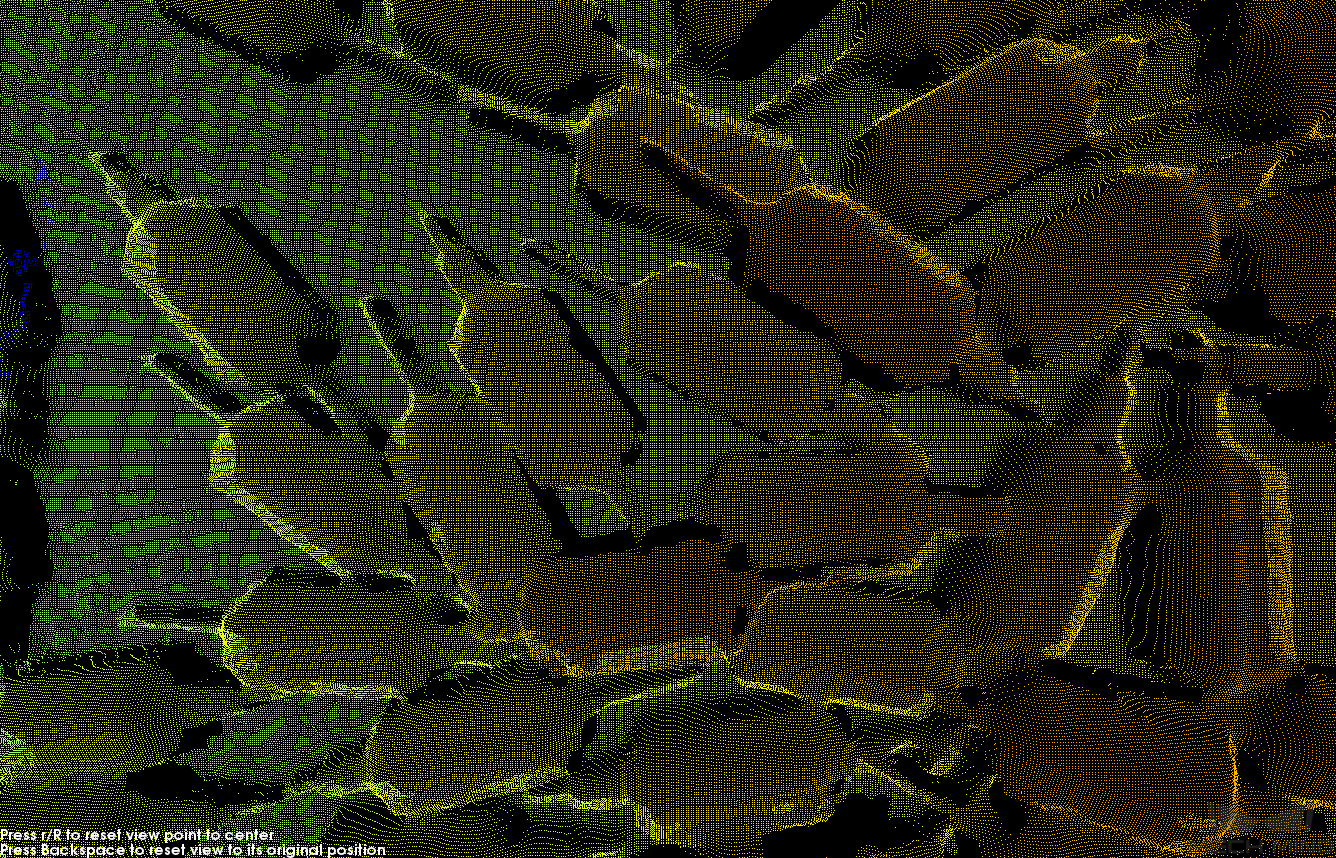
不同 噪点去除 强度效果图对比:
Off
Weak
Normal
提示
如该功能移除了所需点云,可将 噪点去除 强度调低,但将保留更多噪点。
条纹对比度阈值¶
提示
调节 点云平滑 与 噪点去除 后仍无法获得需要的点云时,再调节 条纹对比度阈值 。
调大可过滤图像中的噪点,但可能造成较暗的物体也被滤除。
推荐值为 3。
不同 条纹对比度阈值 效果图对比:
3
15
30