结构光相机工作原理
Mech-Eye 工业级 3D 相机(简称 3D 相机),由 2D 相机与投影仪组成。投影仪投射特定样式的结构光到物体表面,物体形状导致结构光样式变形。3D 相机根据变形后的结构光样式,计算出物体的深度数据。
获取并查看相机数据的过程,分为三个阶段:
使用 Mech-Eye SDK 触发 3D 相机采集图像,采集过程为:
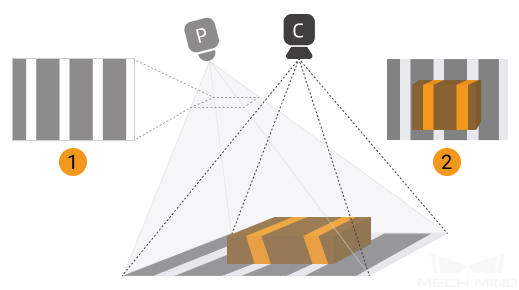
投影仪(下图中 P)投射条纹样式的光至被拍摄物体表面。由于物体本身的结构和形状,条纹样式变形。
2D 相机(下图中 C)拍摄,生成包含变形条纹样式的图像。
3D 相机根据条纹样式的变形,计算出深度数据;再经过处理生成深度图与点云。
3D 相机将生成的数据输出至 Mech-Eye SDK,用户即可看到 2D 图、深度图和点云。